
Lagrange系统的广义斜梯度表示*
2017-06-07 08:21:39楼智美王元斌
动力学与控制学报 2017年1期
楼智美王元斌
(1.绍兴文理学院物理系,绍兴 312000)(2.绍兴文理学院数学系,绍兴 312000)
Lagrange系统的广义斜梯度表示*
楼智美1†王元斌2
(1.绍兴文理学院物理系,绍兴 312000)(2.绍兴文理学院数学系,绍兴 312000)
提出广义斜梯度系统并研究其性质,给出非定常Lagrange系统成为广义斜梯度系统的条件,利用广义斜梯度系统的性质来研究力学系统的稳定性.举例说明结果的应用.
Lagrange系统,广义斜梯度系统,稳定性
引言
通常梯度系统的矩阵和函数都不含时间t.如果矩阵和函数都含时间t,则称为广义梯度系统.如果斜梯度系统的矩阵和函数都含时间t,则称为广义斜梯度系统.文献[1]指出,梯度系统特别适合用Lyapunov函数来研究.文献[2]给出斜梯度系统,但它们都不含时间.有关力学系统与梯度系统的关联研究已有一些结果,如文献[3-12].本文将通常斜梯度系统推广到包含时间的情形,并将非定常Lagrange系统的方程在一定条件下化成广义斜梯度系统的方程,进而借助广义斜梯度系统来研究力学系统的稳定性.
1 广义斜梯度系统
通常斜梯度系统的方程为[2]

这里及以后相同指标表示求和,其中X=(x1,x2,…,xm),bij(X)=-bji(X).将方程(1)推广到包含时间的情形,有

其中bij(t,X)=-bji(t,X),称系统(2)为广义斜梯度系统.

因此,对广义斜梯度系统(2),如果V=V(t,0)=0,V正定,且

则由Lyapunov定理知,解X=0稳定.以上性质可用来研究可化成广义斜梯度系统的力学系统的稳定性.
2 Lagrange系统的梯度表示
Lagrange系统的微分方程为


则由(5)式可解出所有广义加速度,记作

令

则方程(7)可写成如下形式

其中

引进广义动量ps和Hamilton函数H

则方程(5)可写成

进而,方程(12)还可写成

其中

方程(9)或方程(13)一般不能成为广义斜梯度系统.对方程(9)如果存在反对称矩阵(bμν(t,a))和函数V=V(t,a)满足下式

则它可以成为广义斜梯度系统.对方程(13),如果存在反对称矩阵(bμν(t,a))和函数V=V(t,a)满足下式

则它可以成为广义斜梯度系统.
值得注意的是,如果式(15)或式(16)不满足,还不能断定它不是广义斜梯度,因为这与方程(5)的一阶形式的选取相关.方程(5)的一阶形式可有多种选择,而式(9),式(13)是其中的两种.例如,还可选一部分a为q,另一部分a选为的线性式.对单自由度系统

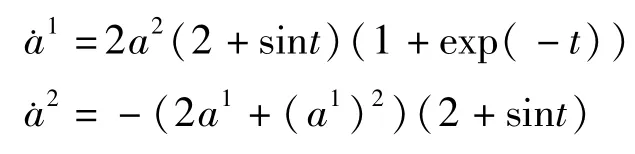
可令

则有

取

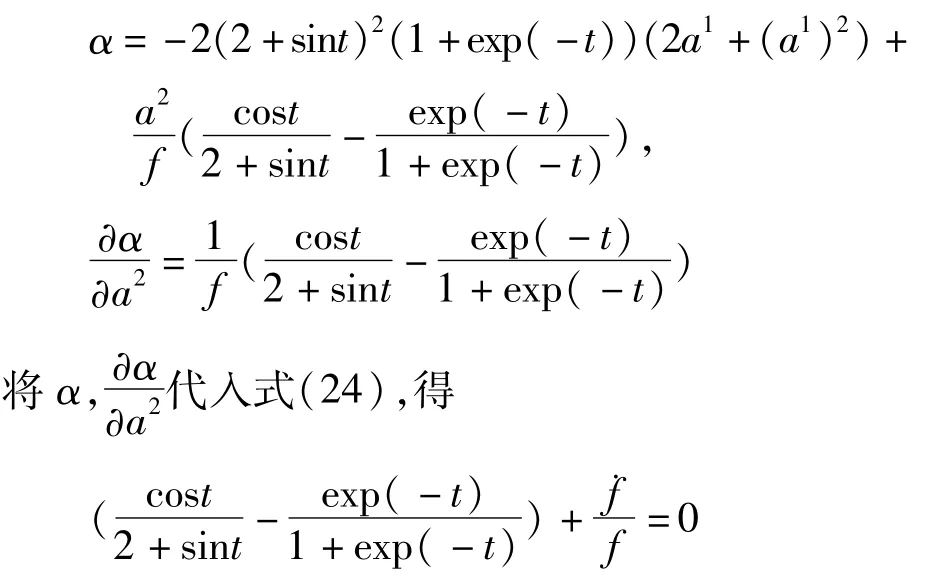
则有
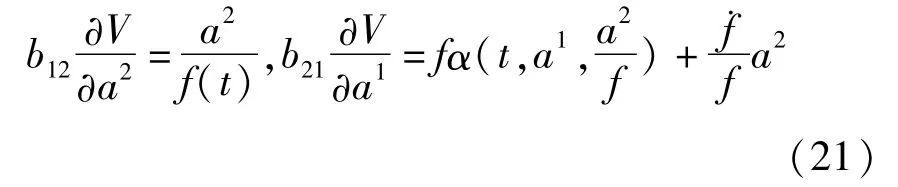
将第一个方程两边对a1求偏导数,将第二个方程两边对a2求偏导数,分别得到

这样,对给出的α,可按式(22)选b12,V,f使之成为广义斜梯度系统.如果

则有

3 算例
例1 单自由度系统为

试将其化成广义斜梯度系统,并研究零解的稳定性.
解:将式(25)代入式(5)可得

若按方程(9)或方程(13)选取a1,a2,还不能成为广义斜梯度系统.现令
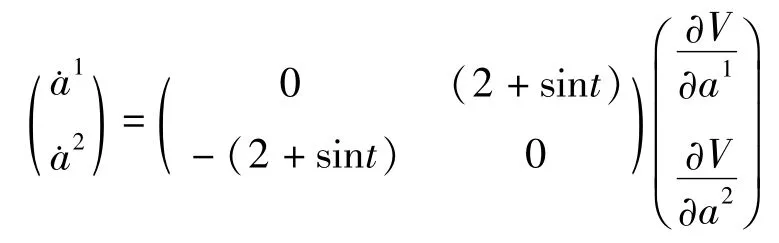
则有

它可写成形式
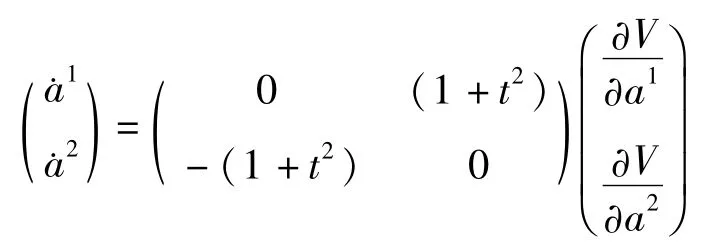
其中矩阵是反对称的,而函数V为

它在a1=a2=0邻域内是正定的,且有
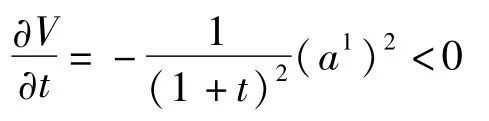
因此,零解a1=a2=0是稳定的.
对比式(24),所选

满足式(24).
例2单自由度系统为

试将其化成广义斜梯度系统,并研究零解的稳定性.
解:将式(26)代入式(5)可得
为将其化成广义斜梯度系统,可按式(23),(24)计算.令

则有
由此可得

这样就有

而方程(19)成为
它可写成形式
其中

它在a1=a2=0邻域内正定,且

因此,零解a1=a2=0是稳定的.
4 结论
非定常力学系统的稳定性研究是一困难问题,直接从微分方程出发来构造Lyapunov函数往往不易实现.本文通过广义斜梯度系统来研究一些非定常Lagrange系统的稳定性问题.力学系统一旦成为广义斜梯度系统,并且使V=V(t,a)成为Lyapunov函数,那么只要满足就可判断系统的稳定性.
1 Hirsch M W,Smale S,Devaney R L.Differential equations,dynamical systems and an introduction to chaos.Singapore:Elsevier,2008
2 Mclachlan R I,Quispel G RW,Robidoux N.Geometric integration using discrete gradients.Philosophical Transactions of the Royal Society A,1999,357:1021~1045
3 梅凤翔.关于梯度系统.力学与实践,2012,34(1):89~90(Mei F X.On the gradient system.Mechanics in Engineering,2012,34(1):89~90(in Chinese))
4 梅凤翔,吴惠彬.广义Birkhoff系统的梯度表示.动力学与控制学报,2012,10(4):289~292(Mei F X,Wu H B.A gradient representation of generalized Birkhoff system.Journal of Dynamicsand Control,2012,10(4):289~292(in Chinese))
5 楼智美,梅凤翔.力学系统的二阶梯度表示.物理学报,2012,61(2):024502(Lou ZM,Mei F X.A second order gradient representation ofmechanics system.Acta Physica Sinica,2012,61(2):024502(in Chinese))
6 梅凤翔,崔金超,吴惠彬.Birkhoff系统的梯度表示和分数维梯度表示.北京理工大学学报,2012,32(12):1298~1300(Mei F X,Cui JC,Wu H B.A gradient representation and a fractional gradient representation of Birkhoff system.Journal of Beijing Institute of Technology,2012,32(12):1298~1300(in Chinese))
7 梅凤翔.分析力学Ⅱ.北京:北京理工大学出版社,2013(Mei F X.2013 Analytical mechanics Ⅱ.Beijing:Beijing Institute of Technology Press(in Chinese))
8 葛伟宽,薛纭,楼智美.完整力学系统的广义梯度表示.物理学报,2014,63(11):110202(Ge W K,Xue Y,Lou ZM.Generalized gradient representation of holonomic me-chanical systems.Acta Physica Sinica,2014,63(11):110202(in Chinese))
9 梅凤翔,吴惠彬.事件空间中完整力学系统的梯度表示.物理学报,2015,64(23):234501(Mei F X,Wu H B.A gradient representation of holonomic system in the event space.Acta Physica Sinica,2015,64(23):234501(in Chinese))
10 Mei FX,Wu H B.Skew-gradient representation of generalized Birkhoffian system.Chinese Physics B,2015,24(10):104502
11 梅凤翔,吴惠彬.一阶Lagrange系统的梯度表示.物理学报,2013,62(21):214501(Mei F X,Wu H B.A gradient representation of first-order Lagrange system.Acta Physica Sinica,2013,62(21):214501(in Chinese))
12 Mei F X,Cai J C.Skew-gradient representation of constrained mechanical systems.Applied Mathematics and Mechanics,2015,36(7):873~882
*The project supported by the National Natural Science Foundation of China(11472177)
†Corresponding author E-mail:louzhimei@usx.edu.cn
GENERALIZED SKEW-GRADIENT REPRESENTATION FOR LAGRANGE SYSTEM*
Lou Zhimei1†Wang Yuanbin2
(1.Department of Physics,Shaoxing University,Shaoxing 312000,China)
(2.Department of Mathematics,Shaoxing University,Shaoxing 312000,China)
A generalized skew-gradient system is proposed,and the characteristic of the system is also studied.Additionally,the condition under which a Lagrange system can be considered as a generalized skew-gradient system is obtained.It shows that the characteristic of the generalized skew-gradient system can be used to study the stability of the mechanics system.Moreover,some examples are given to illustrate the application of the results.
lagrange system,generalized skew-gradient system,stability Received 25 January 2016,revised 25 February 2016.
10.6052/1672-6553-2016-020
2016-01-25收到第1稿,2016-02-25收到修改稿.
*国家自然科学基金资助项目(11472177)
†通讯作者E-mail:louzhimei@usx.edu.cn
猜你喜欢
幼儿画刊(2022年9期)2022-09-14 02:52:30
数学物理学报(2022年3期)2022-05-25 13:33:00
金桥(2021年5期)2021-07-28 06:37:44
儿童故事画报(2020年5期)2020-06-01 07:30:56
甘肃教育(2020年12期)2020-04-13 06:24:16
当代陕西(2019年23期)2020-01-06 12:17:42
中国中医急症(2019年10期)2019-05-21 07:20:28
当代陕西(2018年7期)2018-04-26 02:45:20
中国三峡(2017年3期)2017-06-09 08:14:59
数学年刊A辑(中文版)(2016年2期)2016-10-30 01:46:38
