
基于最大灵敏度的分数阶内模控制器设计
2017-06-06 11:57那景童
大连民族大学学报 2017年3期
那景童,徐 驰
(1.大连交通大学 电气信息学院,辽宁 大连 116028;2.北京化工大学 信息学院,北京 100029)
基于最大灵敏度的分数阶内模控制器设计
那景童1,徐 驰2
(1.大连交通大学 电气信息学院,辽宁 大连 116028;2.北京化工大学 信息学院,北京 100029)
针对分数阶控制器设计参数整定复杂的问题,提出一种基于最大灵敏度的分数阶内模控制器设计方法。采用粒子群优化算法对原系统模型进行简化处理,根据内模控制原理设计分数阶内模控制器;仅通过一个可调参数,实现分数阶内模控制器的快速整定;通过最大灵敏度指标实现分数阶内模控制器的鲁棒整定。仿真结果表明具有良好的控制品质及克服参数摄动的鲁棒性。
分数阶控制;模型简化;内模控制;最大灵敏度
作为传统整数阶微积分的拓展,分数阶微积分在控制领域受到越来越多的关注,特别是在分数阶控制器设计与系统建模方面[1-2]。有关文献指出,利用分数阶微积分描述实际系统可以得到更加准确的系统模型,特别是对于热工系统、粘弹性系统[3]。同时,对于分数阶模型,采用分数阶控制器能够得到较传统整数阶控制器更好的控制性能,分数阶控制效果更加细腻[4]。20世纪末,podluny提出了分数阶PID控制器[5],其一般格式记为PIαDβ。分数阶PIαDβ控制器与传统PID控制器相比,多了两个可调参数(α,β),当α=β=1时,控制器属于常规PID控制器,由于α,β连续可调,因此分数阶PIαDβ控制器具有更大的调节范围、更强的鲁棒性,为得到更优的系统动态性能创造了条件。但正是可调参数的增加增大了控制器参数的整定难度,文献[6]提出基于控制系统期望带宽的IMC-PIαDβ控制器,通过引入内模控制准则减少了分数阶控制器的整定参数,但该方法设计过程中未考虑控制模型参数变化的情况,需要分析系统的频率响应特性;当系统工作环境发生变化时,控制器性能会急剧下降。
针对上述问题,采用粒子群优化算法对原被控模型进行简化,在简化模型的基础上将内模控制思想引入到分数阶控制器设计中,利用内模控制原理有效减少分数阶控制器参数的整定,并基于最大灵敏度指标实现了控制器的鲁棒整定。
1 系统模型简化和分数阶内模控制器设计
1.1 系统模型简化
文献[7]针对分数阶微分算子,采用改进的Oustaloup滤波器进行有理传递函数逼近,得到高阶整数阶模型,这使得系统控制器的设计变得更加复杂,所以针对分数阶系统进行模型简化是很有必要的。在模型简化过程中大部分分数阶模型都可以用式(1)模型结构进行逼近:

(1)
粒子群优化(PSO)算法[8]具有较强的全局搜索能力和鲁棒性且不需要目标函数的特征信息,因此本文采用PSO算法进行模型简化处理。其模型简化的具体步骤如下:
(1)选取目标函数。本文所选目标函数为原系统模型和简化模型的单位阶跃响应误差,即

(2)
式中,n为搜索次数,y(t)和ym(t)分别为原系统模型和简化模型的单位阶跃响应。
(2)确定搜索参数向量并进行初始化。本文选用简化模型结构如式(1),则搜索向量为θ=[k,T,α,L],对待搜索参数进行随机初始化,并随机产生粒子种群、学习因子。本文所选粒子种群为M=35,c1=c2=1.5。
(3)评价每个微粒的位置适应值,计算其目标函数。
(4)对于每个微粒,将其适应值与微粒自身所经历过的最好位置(pbest)进行比较,若更好,则将其替换为当前的pbest。
(5)对于每个微粒,将其适应值与整个群体所经历过的最好位置(gbest)进行比较,若更好,则将其作为整个群体最优位置。
(6)截止条件判断,若符合截止条件则输出搜索向量,否则返回步骤(3)。
1.2 分数阶内模控制器设计
内模控制是将实际对象与对象模型相并联,控制器取模型的动态逆,从而满足闭环系统性能,并通过添加低通滤波器来增强系统的鲁棒性。内模控制的结构如图1,其中R(s)、Y(s)、D(s)分别为设定值、系统输出和外来扰动,U(s)为控制率,Gp(s)和GFo(s)分别为实际被控对象模型和简化模型。
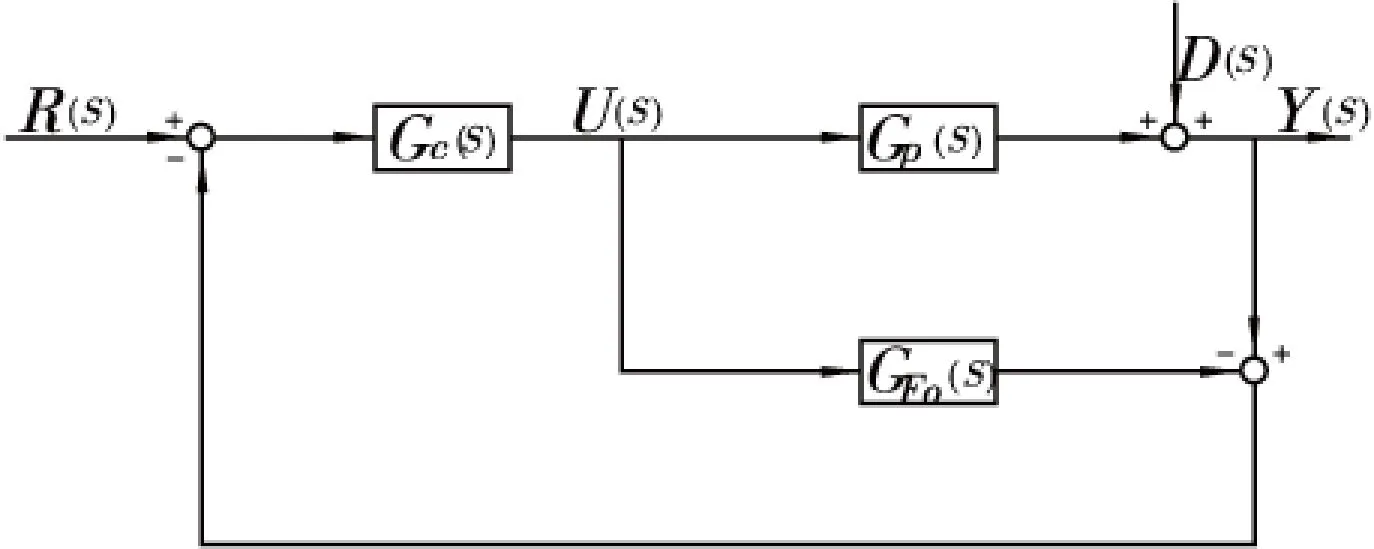
图1 内模控制框图

(3)
分数阶内模控制器设计与内模控制类似,主要分为如下两步:
(1)将简化模型分解成可逆和不可逆两部分:
(4)


(5)

(6)
式中,γ是为了保证系统的物理可实现,τ为滤波器f(s)参数,也是内模控制中唯一可调参数,减小τ系统动态性能得到提高但鲁棒性变差,增大τ情况正好相反。
2 基于最大灵敏度的分数阶内模控制器参数整定
过程控制中,用于控制器设计的系统模型一般都不够精确。因此,控制器的设计应考虑对参数变化的鲁棒性[9]。基于上述所提问题考虑,本文利用最大灵敏度Ms来设计FOIMC控制器(fractionalorderinternalmodelcontrol)。最大灵敏度定义为

(7)式中,C(jω)Gp(jω)为系统开环传递函数,最大灵敏度是指系统开环传递函数的Nyquist曲线与临界(-1,0)的最短距离的倒数,其几何解释如图2。
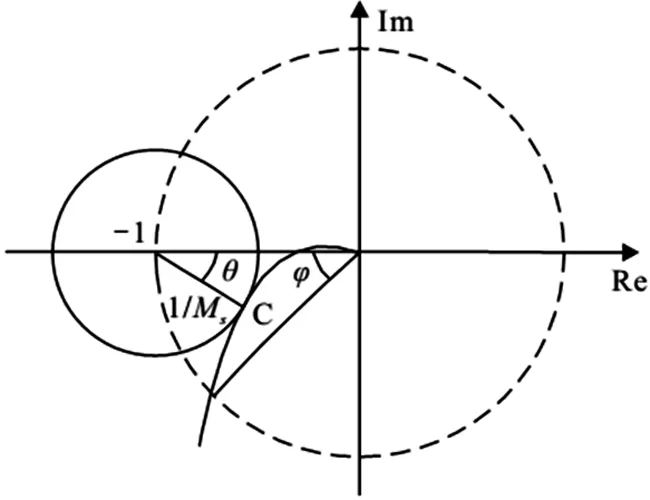
图2 最大灵敏度几何解释
文献[10]指出,Ms的取值范围为1.1~2.5且Ms越小系统的鲁棒性越强。如图2,设相切点为C,则
Gl(jω)=C(jω)Gp(jω)。
(8)
在C点有:

(9)
(10)
式中,θ为过临界点与C点的直线与负实轴的夹角。若GFo(s)=Gp(s),由式(3)可得系统的开环传递函数为:
(11)
令

(12)
将式(11)代入到式(12)可得:
(13)
将式(13)代入到式(9)(10),利用Matlab中fsolve函数求解可得到B与Ms的表达式:

(14)
可得滤波器参数τ与Ms的关系式:

(15)
再由给定的Ms可以得到滤波器f(s)的时间常数τ。
3 仿真及结果分析
考虑分数阶被控对象[11-13]:

(16)
利用本文1.1节所提PSO优化算法对式(16)进行模型简化,优化结果为
θ=[K,T,α,L]=[0.994 6,6.230 1,1.039 4,0.299 6]。
(17)
因此,可得式(16)的化简模型为

(18)
针对简化模型式(18)设计分数阶内模控制器,这里取Ms=1.2,由本文2节控制器设计步骤可得分数阶内模控制器为:

(19)
文献[11]针对式(18)给出了最优分数阶PID控制器为:
(20)
文献[12]针对式(16)给出的一种分数阶内模PID控制器为:

(21)

(22)
分别采用本文方法,文献[11-13]方法得到系统的单位阶跃响应如图3。

图3 系统单位阶跃响应对比
从图3可得,本文设计的分数阶内模控制器相比文献[11-13]所提控制器具有上升时间短、稳态误差小、存在微小超调,综合考虑本文所提分数阶内模控制器具有良好的控制品质。
当系统参数发生变化时,即:

(23)
此时,系统单位阶跃响应如图4。为了有效说明本文所提控制器具有更好的控制品质和鲁棒性,本文选取闭环系统的超调量δ%、调节时间、绝对时间误差积分ITAE作为验证系统控制品质的指标,见表1。由图3、4和表1可得,本文方法与文献[11-13]方法相比,都存在微小超调,综合考虑本文所提控制器在动态响应和鲁棒性方面均具有一定优势。
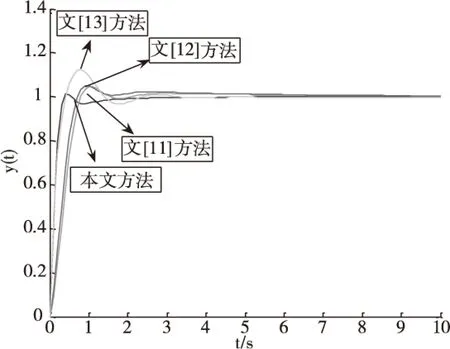
图4 模型失配时系统的单位阶跃响应对比
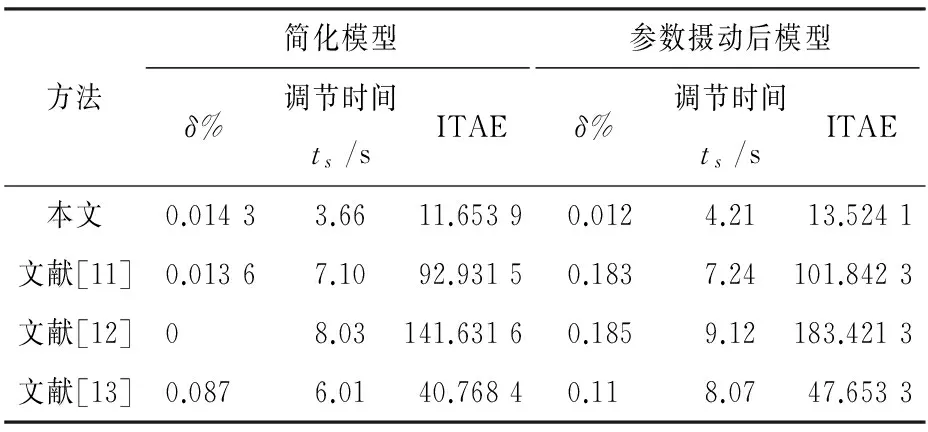
方法简化模型参数摄动后模型δ%调节时间ts/sITAEδ%调节时间ts/sITAE本文0.01433.6611.65390.0124.2113.5241文献[11]0.01367.1092.93150.1837.24101.8423文献[12]08.03141.63160.1859.12183.4213文献[13]0.0876.0140.76840.118.0747.6533
4 结 论
本文针对以往分数阶控制器参数整定复杂问题,提出一种基于最大灵敏度的分数阶内模控制器设计方案。利用PSO算法对原系统模型进行简化处理,然后将内模控制思想引入到简化模型中设计分数阶内模控制器,所得控制器仅有一个可调参数,再通过灵敏度指标Ms推导出控制器唯一
参数的数学表达式。仿真结果说明文章所提方法是行之有效的。
[1]OLDHAMKB,SPANIERJ.Thefractionalcalculus[J].MathematicalGazette,1974,56(247):396-400.
[2] 朱呈祥, 邹云. 分数阶控制研究综述[J]. 控制与决策,2009,24(2):161-169.
[3]CAPONETTOR.Fractionalordersystems:Modelingandcontrolapplications[M].Singapore:WorldScientific,2010:1-4.
[4]MALEKH,LUOY,CHENYQ.Identificationandtuningfractionalorderproportion-integralcontrollersfortimedelayedsystemswithafractionalpole[J].Mechatronics, 2013, 23(7): 746-754.
[5]PODLUBNYI.Fractional-ordersystemsandPIDcontrollers[J].IEEETransonAutomatiControl, 1999,44(1): 208-214.
[6]LiDZ,FANWF,JINQB,etal.AnIMC-PIλDμcontrollerdesignforfractionalcalculussystem[C].Procofthe29thChineseControlConf.Beijing:IEEE, 2010:3581-3585.
[7] 薛定宇. 控制数学问题的MATLAB求解[M]. 北京: 清华大学出版社,2007.
[8]BIRGE,B.Aparticleswarmoptimizationtoolboxformatlab[Z].IEEESwarmIntelligenceSymposiumProceedings,2003,April:24-26.
[9]KAYAI.Two-degree-of-freedomIMCstructureandcontrollerdesignforintegratingprocessesbasedongainandphase-marginspecifications[C]∥IEEEProcofControlTheoryandApplications.NewYork:IET, 2004, 151(4): 481-487.
[10]JINQB,LIUQ,WANGQ,etal.PIDcontrollerdesignbasedonthetimedomaininformationofrobustimccontrollerusingmaximumsensitivity[J].ChineseJournalofChemicalEngineering, 2013, 21(5): 529-536.
[11]DASS,PANI,DASS,etal.Improvedmodelreductionandtuningoffractional-orderPIλDμcontrollersforanalyticalruleextractionwithgeneticprogramming[J].ISATrans, 2012, 51(2): 237-261.
[12] 赵志诚,张博,刘志远,等. 一种分数阶系统内模PID控制器设计方法[J]. 信息与控制,2014,43(2):129-133.
[13] 李大字,刘展,曹娇.2007 仪表自动化及先进集成技术大会论文集:基于IMC方法的分数阶系统控制器设计[C].北京: 仪器仪表学报杂志社,2007: 362-365.
(责任编辑 赵环宇)
A Design of Fractional Order Internal Model Controller Based on Maximum Sensitivity
NA Jing-tong1, XU Chi2
(1.School of Electrical Information, Dalian Jiaotong University, Dalian Liaoning 116028, China;2.School of Information, Beijing University of Chemical Technology, Beijing 100029, China)
With respect to the complexity of fractional order controller parameters tuning, a scheme of maximum sensitivity based fractional order internal controller is proposed. Firstly, the original model is simplified by using particle swam optimization (PSO) algorithm. Secondly, a fractional order controller is designed according to the principle of the internal model control (IMC) based on the simplified model. The proposed controller has only one adjustable parameter, through which the rapid tuning can be achieved. Finally, the robust tuning of the controller parameter is realized using maximum sensitivity index. Simulation results show that this method has good control quality and robustness.
fractional order control; model simplified; internal model control; maximum sensitivity
2016-09-18;最后
2016-11-14
那景童(1989-),男,辽宁大连人,大连交通大学电气信息学院硕士研究生,主要从事分数阶控制研究。
2096-1383(2017)03-0227-04
TP273
A
猜你喜欢
农业机械学报(2020年2期)2020-03-09
中华建设(2019年7期)2019-08-27
制造技术与机床(2018年12期)2018-12-23
成都信息工程大学学报(2017年1期)2017-07-21
项目管理技术(2016年12期)2016-06-15
西南交通大学学报(2016年6期)2016-05-04
四川电力技术(2015年5期)2015-12-19
探测与控制学报(2015年4期)2015-12-15
电测与仪表(2015年16期)2015-04-12
电测与仪表(2015年20期)2015-04-09
