车载智能感知及主动安全系统的研制与开发
2017-06-05 15:01毕雁冰贺小凤
深圳信息职业技术学院学报 2017年1期
毕雁冰, 贺小凤
(深圳信息职业技术学院交通与环境学院, 广东 深圳 518172)
车载智能感知及主动安全系统的研制与开发
毕雁冰, 贺小凤
(深圳信息职业技术学院交通与环境学院, 广东 深圳 518172)
新兴的绿色汽车的研发与产业化,是我国汽车产业领域的发展重点。而事关人民生命安全的车载主动安全系统技术的研发与产业化,更是国家政策支持的重点。因此,本项目是国家鼓励的项目,具有重要意义(1)2009-2010年间,中国因道路交通事故造成50多万人死亡,约260万人受伤。本项目将有助于减少交通的不安全因素;(2)目前交通事故造成的损失约为GDP的1-3%,损失金额逾125亿美元,高于公众卫生服务和农村义务教育的国家财政预算。本项目的研发与产业化有助于减少交通事故造成的损失;(3)我国在汽车安全技术领域同国外先进技术的差距相当大。本项目将极大降低车载主动安全系统的成本,更容易地进入中低档汽车市场,有助于缩小与国外的差距。
车载智能系统;多传感器数据融合;换道识别; 辅助转向控制
随着汽车工业的发展和人们生活水平的日益提高,传统的针对碰撞后的乘员保护等汽车被动安全技术由于无法提供更有效地降低交通事故的措施并彻底杜绝交通事故的发生,已远远不能满足现代交通对汽车安全性的要求。新一轮的汽车安全技术革命是将以碰撞安全为核心的汽车被动安全技术,发展为以预防为目的、以先进的电子、通讯及信息技术为主的汽车主动安全技术。
南方地区雨季较长,暴雨,台风中车辆事故数量所占比重较大。其根本原因在于暴雨天气中,驾驶员在车辆前方,侧方的视线极大受限,加上后视镜因积水或结雾,因此很难判断自身车辆位置,保持与周围车辆的一个安全距离,而路面也会因水膜而阻力减小。在这种情况下,往往因驾驶员对于车辆的操作失误或者车辆失控而造成车辆压线或是变换车道。
1 智能感知及主动安全系统的基本功能
车载智能环境感知及主动安全系统主要功能模块包括立体视差计算及障碍物占有地图生成模块、行车线检出及车辆姿态计算模块、先行车辆检出及跟踪模块、车辆定位,道路信息提取模块、障碍物检出及跟踪模块、综合判断模块、各种I/O接口和报警控制及人机界面控制模块。
(1)道路自动识别/道路偏离报警模块(LDWS): 系统以每秒30次的速度自动识别车辆前方道路,实时计算路宽,车道数,前方弯道水平曲率,自车位置,与道路中心线偏角等信息,综合判断车辆是否出现蛇行以及偏离道路情况,及时发出报警信号。
(2)障碍物检测/前方碰撞报警模块(FCW):系统以每秒10次的速度自动检测车辆行进前方障碍物,实时追踪并计算自车和障碍物之间的可能的冲突时间(TTC: Time-To-Conflict)以及安全距离,及时发出报警信号。
图1是本系统的结构图。本系统分为测位部,导航部和控制部三部分。测位部由全球卫星定位传感器,3维角速度计和加速度计传感器实时传递数据,通过车辆定位系统来实时计算车辆所在位置及方位角;导航部在系统视觉系统对车辆姿态推定后结合测位信息和数字地图管理信息得到所在地的道路静态信息,包括道路等级,行车线数,限速,前方曲度,停车线等信息;控制部由系统视觉系统和激光雷达选项对周边环境的感知结果,实时检测和跟踪前方障碍物,判断冲撞时间等道路动态信息,通过车辆姿态信息和行车线信息对偏离行车线和蛇行的危险举动发出报警信号和导入转向力矩,来提示驾驶员。同时根据周边障碍物对自车的危险度判断,发出报警信号,导入转向力矩以及启动紧急制动等一系列控制指令,传递给底层执行机构。
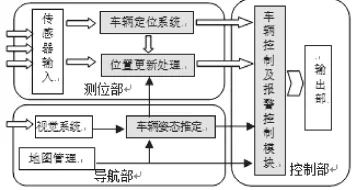
图1 系统结构图Fig.1 The skeleton frame of system
2 各模块功能及技术实现
2.1 高速高精度车辆定位技术
传统的车载导航和定位系统通常采用GPS全球卫星定位结合惯性导航系统来得到车辆所在位置。商用车载GPS导航系统一般精度为10到20米,高端的差分式GPS(DGPS)可以达到5到10米的精度。输出频率为每秒1次。输出结果通常还要与电子地图的道路数据进行地图匹配,所以在比较复杂的市区道路环境中,从接收卫星信号到输出位置数据大约有1到3秒的延迟。而对于车载控制系统尤其是安全系统来讲高精度和实时性是至关重要的,所以用传统的车载定位系统无法满足我们系统的要求。
本项目采用的高速高精度车辆定位技术采用GPS信号结合3维加速度计和1维角速度计,同时通过测量行车线横向偏移量来实时推算出车辆位置。本系统的平均定位精度为3到5米,比同类产品提高3到4倍。同时本系统的输出频率为每秒30次,比同类产品提高近30倍。
实时定位系统的技术原理如图2所示。全球卫星定位系统的输出结果通过与3维角速度计和加速度计推定的位置结果进行比较,计算一定时间范围的位置偏差。这种偏差主要由卫星信号噪音,加速度计累积误差以及地图匹配造成的,与通常的白噪音不同,无法用通常的高斯分布的卡尔曼增益矢量来生成补正矩阵。本项目利用概率密度函数来实时计算一定时间内的位置偏差平均值和分布,采用贝斯推定原理推出补正用矩阵。
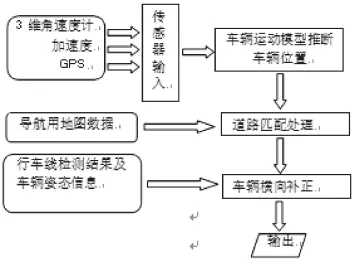
图2 实时定位系统原理图Fig.2 The principle image of time location
通过本技术,车载的定位系统可以达到3到5米的定位精度,每秒中可以输出30次以上的位置信息,达到实时测位的需求。
2.2 基于导航系统的行车线检出技术
传统的车道保持系统和车道偏离报警系统都是通过车载摄像头对车辆前方道路景象进行实时处理,得到车辆的水平位置偏移量和偏角。在距离行车道边缘过近或偏角过大时激发报警或转向控制力矩。
通常的系统的适用道路仅限于高速道路以及城市快速道路等行车线比较鲜明,道路交通状况比较简单的环境。同时为了达到实时计算的要求,通常只对车辆前方30到40米的行车线进行直线或渐近曲线的拟合。而对于主要在一般道路行驶的车载控制系统尤其是安全系统来讲,对于行车道白线的不鲜明,包括遮挡,阴影,污迹,磨损,不规则等必须具有极强的鲁棒性。同时系统必须适用于夜间,阴雨,隧道和山路等各种气象、照明和道路条件。所以用传统的车道保持系统和车道偏离报警系统无法满足我们系统的要求。
本系统采用基于导航系统提供的道路静态信息对行车线曲率变化进行预测,极大地减少了参数搜索范围,对城市一般道路的行车线具有极强的鲁棒性,适用于各种道路环境和气象及照明环境。
本系统的技术原理如下。测位部实时计算车辆所在位置及方位角后将结果传给导航部结合数字地图管理信息得到所在地的道路静态信息,包括道路等级,行车线数,限速,前方曲度,停车线等信息。通过此信息生成前方道路形状模型和误差共分散矩阵。车辆姿态包括偏移量和偏角,俯角,高度,行车线宽度等。行车线检出主要是将行车线白线纯在范围作为误差分散来考虑,通过扩张卡尔满滤波器将误差分散最小化。图3为行车线的形状模型(△),和误差共分散矩阵(○)示意图。图像纵向的区段为白线检测区间,在次区间内通过Hough变换得到行车线边沿的直线段,用3次曲线进行拟合。在拟合的过程中用递归的方法更新状态矩阵和误差共分散矩阵。最终的曲线拟合结果来输出车辆姿态信息及道路宽度,水平曲率等道路信息。

图3 行车线的检测原理图Fig.3 The principle image of vehicle routine
3 与典型模型的比较分析
目前,加州大学的安全换道模型被世界公认为典型的模型,将本文提出的算法与典型算法相比,在最小安全距离和换道时间上均小于典型算法,比如本文算法的换道时间为3s,而典型算法为10s。同时车速没有明显的突变,符合驾驶安全性与舒适性的要求。其次,本文算法在试验车进入目标车道后即进入安全跟踪模式,符合驾驶员在实际驾驶中的行为特性。

图4 典型模型试验车与目标车的相对纵向位移变化曲线Fig. 4 Classical model of longitudinal displacement changing curve between experiment vehicle and target vehicle betweenexperiment vehicle and target vehicle
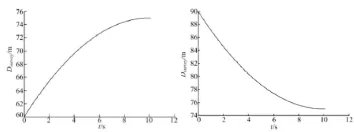
图5 本文试验车与目标车的相对纵向位移变化曲线Fig. 5 Longitudinal displacement changing curve between experiment vehicle and target vehicle
4 道路模型验证
判断驾驶员换道意图前,如果有转向灯信号触发,系统自动默认为驾驶员有换道意图;如果摄像头观测到车辆即将触碰双实线,系统自动默认驾驶员没有换道意图。
驾驶员有换道意图时,由于此时要观查即将所换道一侧的车况,因视线受限而会向其一侧偏头,我们将驾驶员头部水平偏转角度设置为;变换车道过程中,如果所换车道上有其他车辆,驾驶员或是加速,或是减速以避开侧向车辆,我们将车辆单位时间内车速的变化幅度设置为;换道时的方向盘转动角度设置成。上诉三个参数与驾驶员换道意图成正比关系。驾驶员换道意图评价参数为:

根据车辆未来轨迹与车道标志线的位置,首先确定车辆当前的行驶状态,如果判断车辆有换道趋势,读取驾驶员换道意图评价参数,如果参数高于设定阈值,系统设置为驾驶员有换道意图,因此不予预警;当驾驶员换道意图评价参数低于设定阈值,系统设置为驾驶员没有换道意图,发出预警信息。
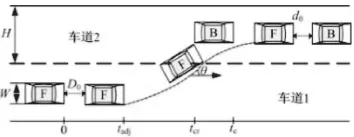
图6 目标车辆换道过程Fig.6 The process of changing way
周围车辆对于当前车辆的影响主要包括侧向距离,横向相对速度及距离,当驾驶员意图参数达到阈值时,根据对应每一个加速度值,计算汽车所能到达的位置,根据汽车预期轨迹点相对于周围车辆的横、纵向距离来判断车辆目前所处于的状态。如果计算出目标车辆与周围车辆即将发生碰撞,系统及时发出预警信息。
当驾驶员意图参数没有达到阈值,按照上述过程计算目标车辆的未来轨迹以及与周围车辆的位置关系。当车辆未来轨迹可避免与前车碰撞,系统不发出预警信息。
偏离预警系统的实验路况,大抵可以分4种,如下图所示。在驾驶员无意图情况下,变换车道可以分为:所换车道无车、所换车道侧面车辆预警、所换车道后车预警、所换车道前车预警等情况。

图7 车道实验示意图Fig.7 The diagram of lane experiment
比较现有的预警算法,本系统更加的具有地域针对性,在保证减少误报率的同时,预警的精确度更加提升,给驾驶员预留的反应时间更加合理。
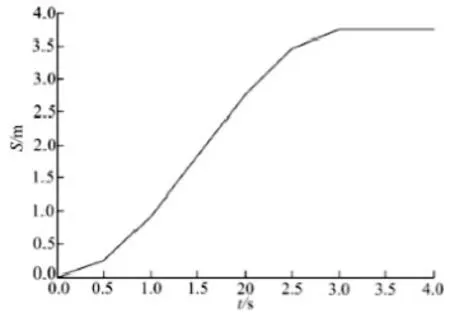
图8 横向位移变化曲线Fig. 8 Lateral displacement changing curve
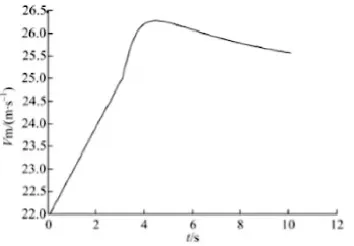
图9 速度变化曲线Fig. 9 Speed changing curve
5 结束语
(1)系统提前计算出车辆未来轨迹,估算与周围车辆的位置关系,判断当前车辆在可行区域的行车状况,给予驾驶员充分的反应时间;
(2)引入驾驶员行车意图,系统更加的人性化,可以极大的减少空预警率,减少系统对于驾驶员的影响;
(3)取代传统的模糊算法和神经元算法,简化计算流程,系统运行更加的快速,保证系统运行的实时性。
[1] K. Sato, Y. Kubota, Y. Am ano, Development of Steering Assist System (STAR) for the Lane Departure Warning, Proc. of the 5th World Congress on Intelligent Transport Systems, [Z], 2015
[2] BROGGI Alberto, DICKMANNS E.D. Applications of computer vision to intelligent vehicles[J]. Image and Vision Computing. 2012,28: 365-366
[3] BROGGI Alberto, Intelligent vehicle applications worldwide[J]. IEEE Intelligent Systems, 2014(1): 78-81
[4] DICKMANNS E.D, MYSLIWETZ B.D. Recursive 3-d road and relative ego-state recognition[J]. IEEE Transactions on Pattern Analysis and Machine Intelligence, 2013, 14:199~213.
[5] THORPE Charles. Toward autonomous driving-the CMU navlab[J]. IEEE Expert System, 2014(4): 31~42
[6] BROGGI Alberto, The argo autonomous vehicle's vision and control systems[J]. International Journal of Intelligent Control and Systems 2015,3 (4): 409~441
Researchment and development of vehicular intelligence perception and initiative safe system
BI Yanbing, HE Xiaofeng
(School of Traffic and Environment, Shenzhen Institute of Information Technology, Shenzhen 518172 , P.R.China)
The research and industrialization of newly environment-friendly vehicle is the important part of vehicle industry in china. While the priority of vehicle industry development in China lies in the research and industrialization of vehicular safe system closely concerning about people’s safety. Therefore, this project is supported by national policy and is of great significance in three aspects: reducing the traffic accidents, decreasing the loss of wealth caused by traffic accidents, narrowing the gap of technology of vehicle safety between china and other countries.
intelligence system of vehicle; data fusing of sensor; recognize of changing lane; the control of turning
U469.79
:A
1672-6332(2017)01-0043-05
【责任编辑:杨立衡】
2017-03-20
国家自然科学基金资助项目(59775027);高等学校骨干教师计划资助项目(GG-580-10183-1995)
毕雁冰(1976-),男(汉),博士,副教授,主要研究方向:汽车动态模拟与仿真方面的研究。E-mail: rubin1919@163.com
猜你喜欢
法律方法(2022年2期)2022-10-20
汽车实用技术(2022年10期)2022-06-09
福建基础教育研究(2022年4期)2022-05-16
卫星应用(2021年11期)2022-01-19
科学大众(2021年9期)2021-07-16
法律方法(2021年3期)2021-03-16
中国交通信息化(2020年11期)2021-01-14
铁道通信信号(2020年8期)2020-02-06
中国公共安全(2017年11期)2017-02-06
电源技术(2015年2期)2015-08-22