基于重复控制和无差拍控制的逆变电源控制
2017-06-05 09:07刘克平
长春工业大学学报 2017年2期
陈 振, 李 岩, 刘克平
(长春工业大学 电气与电子工程学院, 吉林 长春 130012)
基于重复控制和无差拍控制的逆变电源控制
陈 振, 李 岩, 刘克平*
(长春工业大学 电气与电子工程学院, 吉林 长春 130012)
构建了逆变电源复合控制模型,阐述了该模型的工作过程。该系统响应速度快、输出误差小、电源波形稳定。
逆变电源; 重复控制; 无差拍控制; 复合控制
0 引 言
逆变电源的控制策略影响其输出电能的质量,其拓扑结构需要结合优良的控制方法才能输出高品质的电能,逆变电源的控制方法是近年来研究的热点之一[1-2]。逆变电源控制技术经历了3个阶段的发展,比较常见的控制技术目前主要有重复控制、滑模变结构控制、模糊控制、无差拍控制等[3]。各种控制技术的使用有效地提升了逆变电源系统的性能。重复控制技术对于波形控制非常有效,可以提高电压波形的质量,只是此方法响应速度慢。无差拍控制响应速度极快,但是鲁棒性不强,超调量大。因此,将这两种控制方法结合使用,优势互补,构成复合控制器是一种趋势。文中吸取了重复控制和无差拍控制两者的优点,提出一种把两种控制算法组合在一起的复合控制算法。通过MATLAB/SIMULINK仿真软件进行实验,实验结果证明,复合控制方法与单一的控制方法相比,更有利于改善逆变电源系统的动静态品质,具有瞬时响应快和较强的稳定性能。
1 重复控制方法与无差拍控制方法研究
1.1 重复控制方法
重复控制器结构如图1所示。

(a) 理想重复信号发生器 (b) 改进后的重复信号发生器
内模为重复控制器提供连续而稳定的控制信号。图1(a)为理想重复信号发生器,相当于以一定的周期作为步长的一个积分环节,实现跟踪给定信号。这种结构使得系统的开环极点分布在单位圆上,开环系统处在临界震荡状态,不利于系统的稳定。实际工程中不允许这种情况存在,对系统结构加以改进,改进后的重复信号发生器见图1(b),在反馈回路加入辅助补偿器Q(z),使得分布在单位圆上的开环极点发生偏移,有利于系统稳定。由图1(b)可得:
式中:N----基波周期采样次数;
Q(z)----低通滤波器函数或常数,用来加强系统的稳定性,这里取0.96;
E(z)----输入与输出误差;
U0(z)----内模输出。
有
写成差分方程
由式(3)可知,k时刻系统的输出等于(k-N)时刻输出的0.96倍与k时刻偏差的和。当输入量减小为输出量的4%时,累加过程相当于已经停止。系统的稳定性由于补偿器的加入得到改善,但是系统的稳态误差却被牺牲了。实际应用中均是图1(b)所示的改进后的重复信号发生器。在图1(b)基础上增加周期延迟环节Z-N和辅助补偿器C(z),形成一个完整的重复控制器。重复控制器在原有的基础上嵌入重复控制器,这种控制结构可称为“嵌入式”结构[4]。在实际应用中,嵌入式重复控制器系统如图2所示。
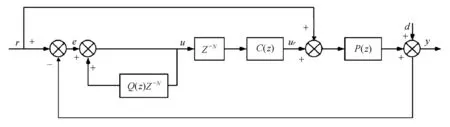
图2 嵌入式重复控制系统结构图
其中,r为参考正弦输入信号,y为逆变输出电压,d为干扰信号,P(z)为控制对象,Z-N为周期延迟环节,实现延迟控制动作。当系统存在偏差时,重复控制器产生的控制效果最少要推迟一个控制周期,采用重复控制方法,使得系统动态响应性能变差。
通过以上分析可知,利用较小时间粒度的客流监测数据可以对轨道换乘站客流拥塞风险进行评价,且由于不同换乘站的进、出站及换乘客流时变特征存在差异,不同走向的客流可能对客流拥塞风险造成不同的影响,因此需要将它们作为3个相对独立的指标.
针对控制对象P(z)特点设置补偿器C(z),补偿器C(z)一般采用以下形式:
C(z)=Kr·Zk·S(z)
式中:Kr----重复控制器增益,用来调整输出幅值,且Kr∈(0,1),这里取Kr=0.8;
Zk----超前环节,用来补偿控制对象本身和滤波器相位滞后,这里取k=6;
S(z)----滤波器,文中选择二阶滤波器。
S(z)=
1.2 无差拍控制方法
无差拍控制技术是数字控制技术中比较特殊的一种控制技术,它的优点主要是瞬时反应速度快、波形畸变率低[5]。无差拍控制根据对负载电流控制方式的不同,可以分为阻性负载无差拍控制和任意负载无差拍控制[6]。文中是基于电阻性负载无差拍控制,针对电阻性负载建模,并推导出相应的控制规律。系统模型如图3所示。
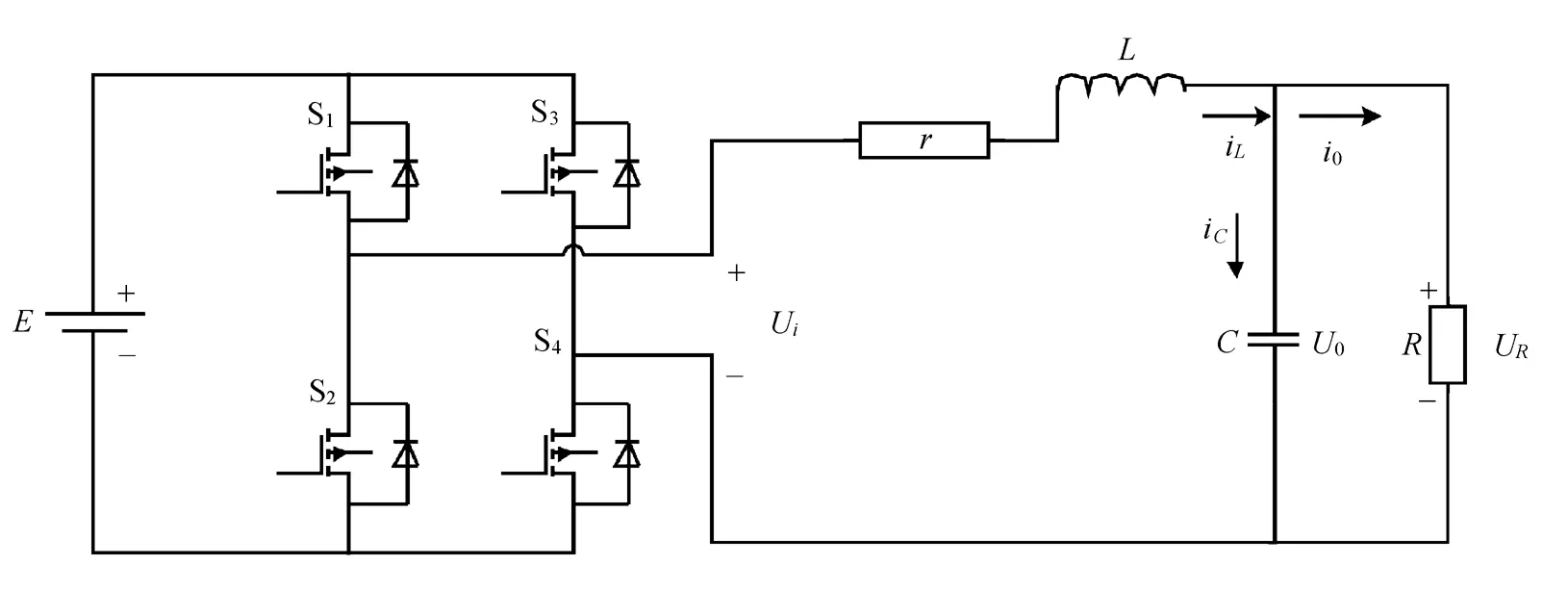
图3 逆变电源系统的数学模型
将滤波器电容电压u0(t)及电感电流iL(t)作为状态变量,以逆变桥输出ui(t)作为电路输入,负载为输出,建立状态方程为:
其中:


式中:ui----逆变器输出电压;
T----矩阵转置。
若是采样频率足够大,能够认为在采样周期内逆变器输出电压ui不变,依据等效冲量原理,将式(4)和式(5)离散化,得到离散化状态方程
其中:
M1=A-1(eATs-Ι)B1=[m11-m12]T

由式(6)可以得到:
由式(8)可推出:
将式(10)中的u0(k+1)用参考指令uref(k+1)代替,得到

此控制方法对数学模型依赖性很强,一旦参数发生变化,系统的稳定性就会发生变化,因此这种控制方法的稳定性比较差。
2 复合控制方法
经过对重复控制方法和无差拍控制方法的研究,考虑动、静态性能对系统的重要性,将重复控制方法和无差拍控制方法组合构成复合控制[7]。采用复合控制方法存在偏差时,经过重复控制器逐步消除偏差,有效跟踪给定信号,同时无差拍控制器能够使系统动态响应速度变快。重复控制器改善系统鲁棒性,无差拍控制器提升系统动态响应性能,将两者有机结合,提升系统动、静态性能[8]。无差拍控制和重复控制组成的复合控制系统框图如图4所示。

图4 复合控制系统框图
由逆变器输出端检测到输出电压u0(k)和电流i0(k),反馈给无差拍控制器,并参与运算而得到控制量udc(k);同时,检测到输出电压u0(k),也反馈给重复控制器,并参与运算而获得控制量urc(k)。将两个控制量叠加,从而获得一个最后控制量ufc(k),对逆变器进行控制。此方案中,无差拍控制器和重复控制器共同对系统的输出产生影响。这个影响来自两个方面,一方面,因为系统在稳定运行时,其跟踪误差非常小,所以无差拍控制器对系统的影响可以忽略不计。这时,重复控制器起的控制作用相当于积分器,控制效果就是将历史误差进行累加。另一方面,跟踪误差会随着系统干扰的变大而忽然变大,重复控制器的输出因为有参考周期的延时不会发生变化,但无差拍控制器会马上产生控制作用,确保输出电压波形不会发生突变。这样,一个周期以内,即使不能非常好的确保输出波形的质量,然而输出电压却不会发生突变。经过一个周期以后,重复控制器的控制作用使得跟踪误差逐步减小。无差拍控制器的控制效果随着跟踪误差的降低而逐步降低,直到系统到达新的稳定状态运行。
3 控制系统仿真
系统闭环仿真模型如图5所示。
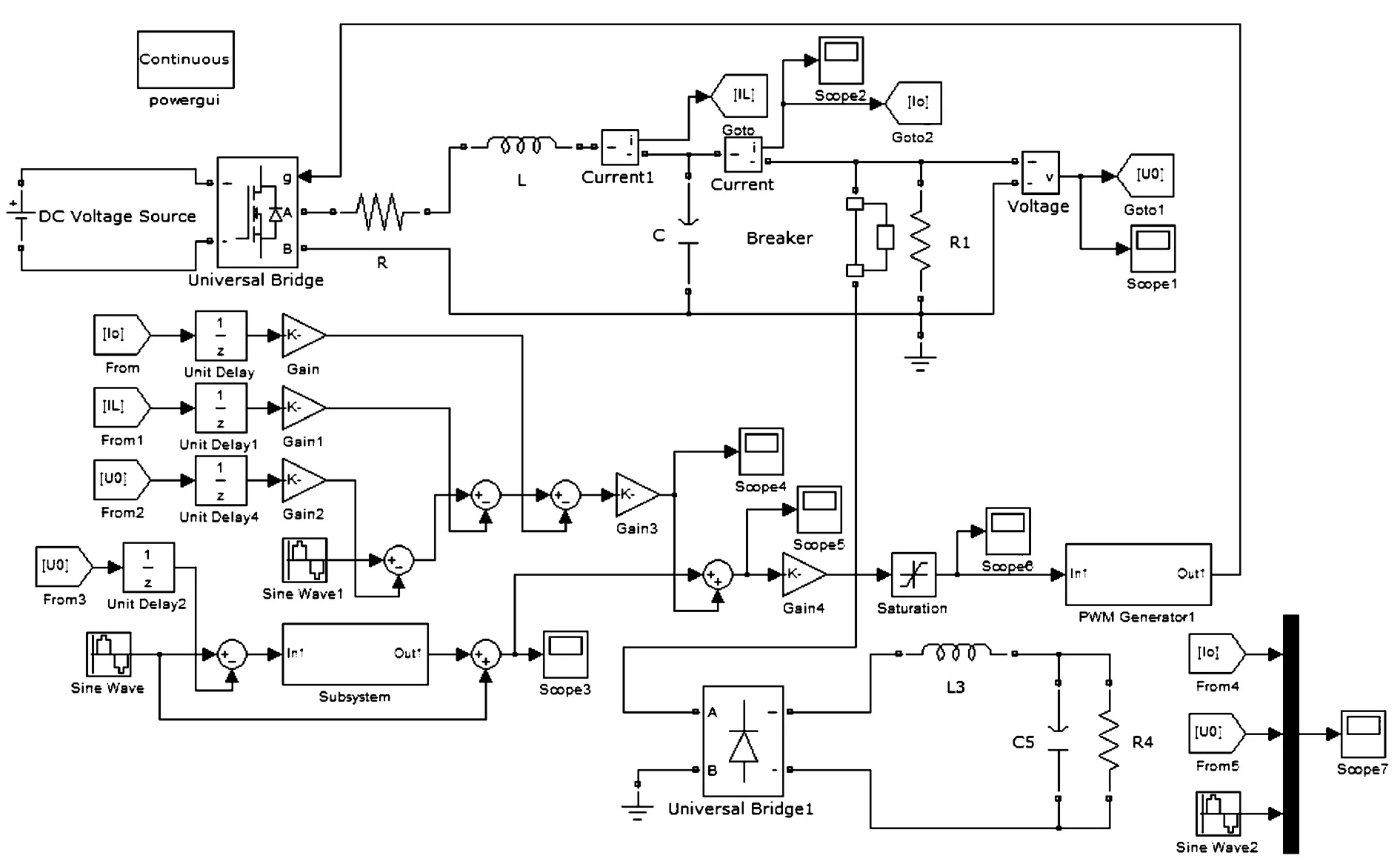
图5 系统闭环仿真模型
逆变器的输出电压通过LC滤波器滤波以后输出。检测到的电压与参考电压进行比较,产生偏差,经过无差拍控制器输出无差拍控制率,同时,通过重复控制器输出相应的控制量,接着调整由数字信号控制器DSP2812产生的SPWM波形占空比,从而控制逆变桥中MOS管的导通和关断时间,使得参考电压能够更好地被输出电压波跟踪。
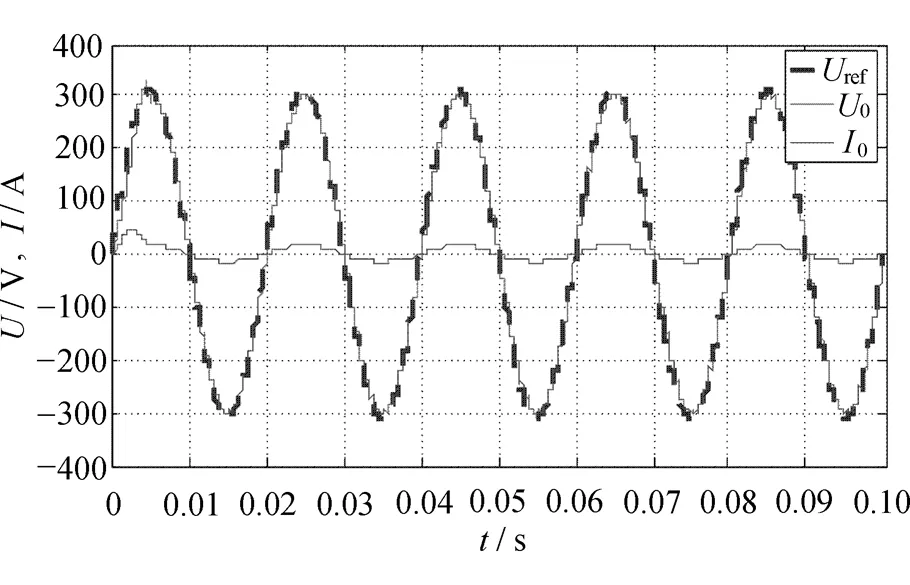
仿真参数为:直流母线电压400 V,额定输出电压(交流)311 V;额定输出电压频率50 Hz;滤波电感、电容、电阻分别为L=27 μH,C=45 μF,R=26.45 Ω,滤波电感、电容的等效电阻以及其他阻尼因素的综合r=0.5 Ω,仿真时间0.1 s。图中,U0为输出电压,Uref为参考电压,I0为输出电流。仿真波形如图6所示。

(a) 无差拍控制不带负载仿真波形

(b) 无差拍控制带阻性负载仿真波形

(c) 重复控制不带负载仿真波形
(d) 重复控制带阻性负载仿真波形

(e) 复合控制带阻性负载仿真波形

(f) 复合控制突加阻性负载仿真波形
从图中可以看出,无差拍控制的反应速度比较快,但稳态性能比较差;而重复控制的稳定性明显优于无差拍控制,但是精确度不高;当使用复合控制方法时,逐步消除误差,动态响应快,能够较好地跟踪给定信号。采用复合控制方法有更好的动静态效果。
4 结 语
主要研究了无差拍控制和重复控制这两种不同控制算法的优劣,吸取了这两种方法的优点,提出一种复合控制方法。仿真结果表明,此控制方法整合了重复控制方法和无差拍控制方法的优点,能有效提升逆变电源系统的动静态性能、响应速度和稳态精度。
[1] 杨照辉,陈红娟.基于SPWM模块化逆变电源的研究与设计[J].电源技术,2014,38(7):1349-1351.
[2] 刁元均.基于DSP的逆变电源数字控制技术的研究[D].成都:西南交通大学,2007.
[3] 王萍,刁长玉,丁辉.基于虚拟电阻的重复控制算法在逆变电源中的应用[J].天津大学学报,2014,47(7):596-600.
[4] 郭金库,赵彬,李岩,等.基于dsPIC30F4011的逆变电源复合控制[J].长春工业大学学报,2016,37(4):372-378.
[5] 叶烁.基于DSP的太阳能无差控制光伏并网逆变器的设计[D].广州:华南理工大学,2012.
[6] 陈新仪.PWM逆变电源数字无差拍控制技术研究[D].武汉:华中科技大学,2011.
[7] 李金刚,马鑫,钟彦儒.中频正弦波逆变器的复合控制方法的研究[J].西安理工大学学报,2008,24(4):436-440.
[8] 强文,黄西平,王鑫.基于重复控制和无差拍控制的逆变电源数字控制技术研究[J].通信电源技术,2007,24(4):14-17.
An inverter control system based on repetitive and deadbeat control
CHEN Zhen, LI Yan, LIU Keping*
(School of Electrical & Electronic Engineering, Changchun University of Technology, Changchun 130012, China)
A compound control model for inverter supply is built. We discuss the working principle and process. The control system has the features of quick response, small output error and stable output waveform.
inverter; repetitive control; deadbeat control; compound control.
2016-07-20
吉林省科技发展计划基金资助项目(20140204026GX)
陈 振(1989-),男,汉族,江苏盐城人,长春工业大学硕士研究生,主要从事智能仪器与系统方向研究,E-mail:1181533650@qq.com. *通讯作者:刘克平(1971-),男,汉族,吉林汪清人,长春工业大学教授,博士,主要从事复杂系统建模、优化与控制方向研究,E-mail:liukeping@ccut.edu.cn.
10.15923/j.cnki.cn22-1382/t.2017.2.07
TM 773
A
1674-1374(2017)02-0138-06
猜你喜欢
遥测遥控(2022年1期)2022-02-11
建材发展导向(2019年13期)2019-08-24
电子制作(2019年7期)2019-04-25
测控技术(2018年2期)2018-12-09
雷达学报(2018年5期)2018-12-05
中国惯性技术学报(2017年1期)2017-06-09
照明工程学报(2016年3期)2016-06-01
通信电源技术(2016年3期)2016-03-26
焊接(2016年5期)2016-02-27
组合机床与自动化加工技术(2014年10期)2014-03-01