间伐材伐区用小型抓木机的设计与分析
2017-06-05 15:05杨春梅赵洪元宋文龙朱晓亮马岩
林业工程学报 2017年3期
杨春梅,赵洪元,宋文龙,朱晓亮,马岩
(东北林业大学林业与木工机械工程技术中心,哈尔滨150040)
间伐材伐区用小型抓木机的设计与分析
杨春梅,赵洪元,宋文龙*,朱晓亮,马岩
(东北林业大学林业与木工机械工程技术中心,哈尔滨150040)
通过对林区集材设备具体情况的分析与研究,设计了一台小型履带式抓木机。该小型履带式抓木机具有体积小、质量轻、牵引力大等特点,能够在林区内部灵活移动,并且该设备操作简单,使林区工人能够方便操作,以适应现在林区生产作业的要求。主要介绍了该设备的整机结构、工作原理,并对其所需牵引力与额定功率进行计算分析,同时对抓木机的行驶稳定性进行定性分析,得出影响行驶稳定性各因素之间的关系。分析结果表明,保持较小偏心距、增加轨距可获得较好行驶稳定性;并通过计算得出整机纵向行驶的最大坡度角27.4°,横向行驶的最大坡度角28.3°,转弯半径1.89 m,最大转弯速度2.7 km/h。分析结果证明该抓木机能满足间伐材伐区木材收集与运输要求,具有良好的行驶稳定性,对林业现代化发展有促进作用。
小型抓木机;设计;间伐;运输;稳定性分析
伐区作业是木材生产的首要阶段,工时消耗和费用占伐区生产段总成本的70%左右,而且是木材采伐对环境破坏最严重的环节[1]。考虑木材生产的森林生态效益和社会经济效益,林业发展方式对人工林、次生林转变为重视抚育间伐作业,传统伐区木材生产机械由于其体积和质量较大,在行驶过程中会对树木造成损伤,而且会造成土壤压实,不利于森林更新等[2-3]。此外,设备价格昂贵,功能单一,已不能适应现在林区生产作业的要求。
笔者针对间伐材伐区的实际工作条件,设计一台环境友好型的小型履带式抓木机,该设备具有小型化的特点,体积小,质量轻,转弯灵活。同时,该设备牵引力大,可以自装卸木材,能够运输截断的原木以及剩余枝桠材,具有较好的经济效益和生态效益。
1 整机结构
伐区地形环境复杂,设备活动空间小,并且存在斜坡、凹坑等。小型履带式抓木机体积小、转弯灵活、越障能力强,使小型履带式抓木机能够高效快速地完成收集木材的任务。其由动力系统、行走机构、减速器组件、控制系统、液压系统、抓具等组成,柴油机、变速箱布置在底盘上,抓具通过杆件与底盘相连,最终使整机拥有结构紧凑、布局合理、机动灵活的特点。小型履带式抓木机整机结构如图1所示。
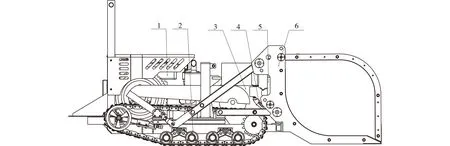
1.动力系统;2.行走机构;3.减速器组件;4.控制系统;5液压系统;6.抓具图1 小型履带式抓木机整机结构Fig. 1 Diagram of the crawler timber grab
2 工作原理
抓木机主机机架上安装有柴油机、减速器组件及控制系统,当设备工作时柴油机通过皮带将动力传给离合器,离合器与减速器组件输入轴相连,减速器组件输出轴连接驱动链轮,输出动力给履带式行走机构,行走机构在动力链轮的驱动和张紧轮、支重轮的支撑下使整机行走。
抓具通过杆机构安装在该设备的前部,当进行木材收集时,柴油机通过减速器组件的齿轮泵将动力转递给液压缸,通过控制抓具的液压缸使抓具张开与闭合,再通过控制旋转液压缸使抓具旋转到木材收集位置与运输位置,从而实现木材的收集与运输。小型抓木机行走机构的动力系统简图如图2所示。
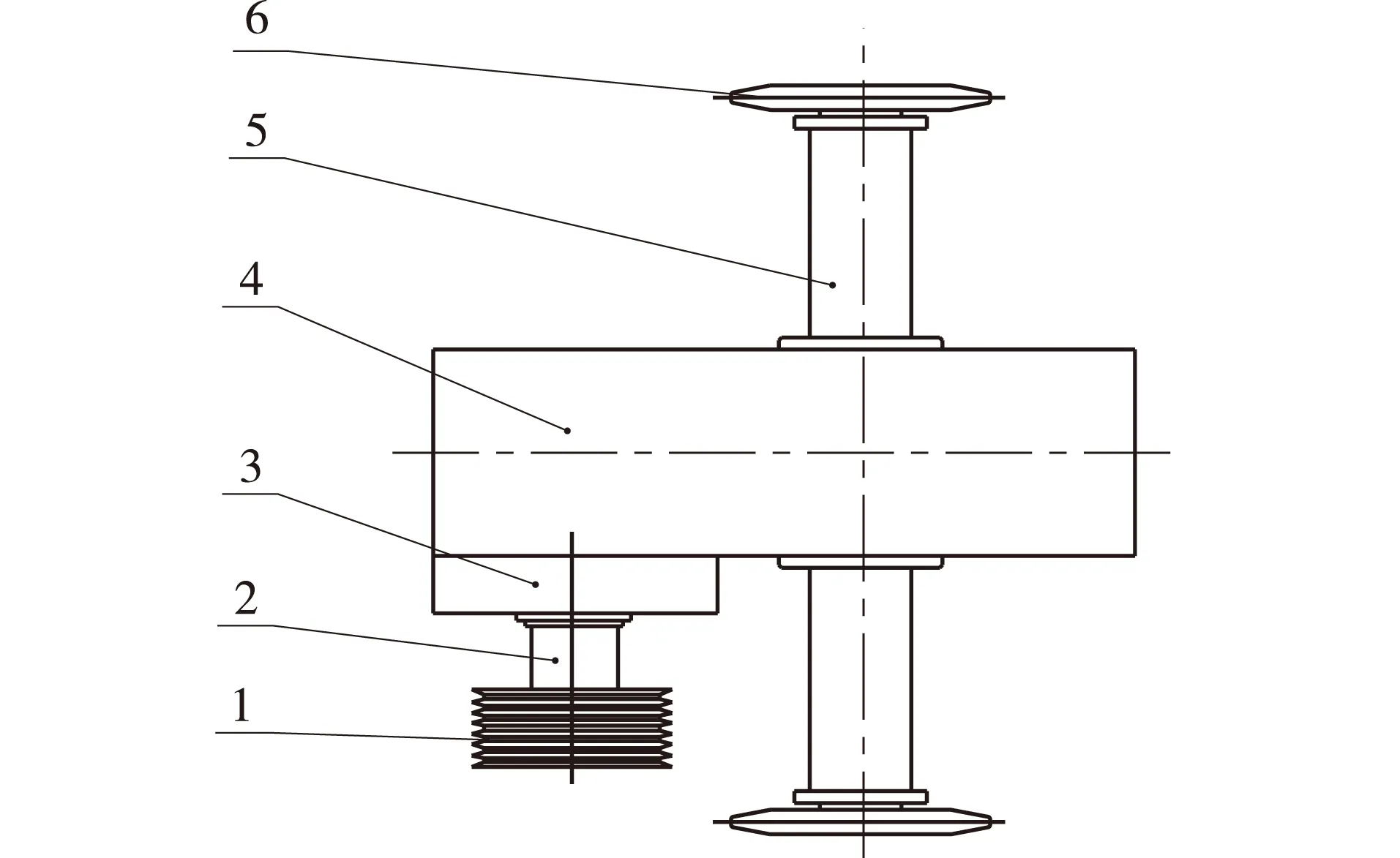
1.带轮;2.动力输入轴;3.离合器;4.减速器;5.输出轴;6.驱动轮图2 小型履带式抓木机传动系统简图Fig. 2 Diagram of the transmission system of the crawler timber grab
3 牵引力与额定功率的计算
为保证小型抓木机在林间行驶时具有良好的通过性能,根据林区集材道的宽度2.3 m,在保证机体不碰触伐根与树木的前提下,初步选择整机的三维尺寸(长×宽×高)为2 700 mm×1 100 mm×1 200 mm。按下式计算其转弯通过性能:
(1)
式中:R为最大转弯半径;m为转弯瞬心至抓木机中心轴的垂直距离,最小值为抓木机宽度的一半,取600 mm;E为车身宽度,取1 100 mm;d为抓木机车体最外侧点至前轴的纵向距离,可用轴距代替,取值1 500 mm。
将以上参数代入公式(1)得R=1.89 m,小于2.3 m,证明抓木机在林间可实现正常的转弯行驶。
根据公式(2)可知,要确定小型抓木机理论额定功率P,首先需要确定抓木机运送木材时所需牵引力Fq[4]。
(2)
式中:P为小型抓木机理论额定功率,单位W;v为小型抓木机行驶速度,参考OH-13-138.64标准中缓行速度1.8~3.6 km/h,选择此范围内的值v=2.7 km/h作为设计小型抓木机在林间正常的转弯行驶速度[5];η为小型抓木机传动效率,η=0.75。
抓木机收集木材后的牵引力Fq需要克服所行驶阻力∑Ff,为了获得最佳设计方案,需以抓木机上坡时运输为参考。小型抓木机运输木材上坡受力简图如图3所示。
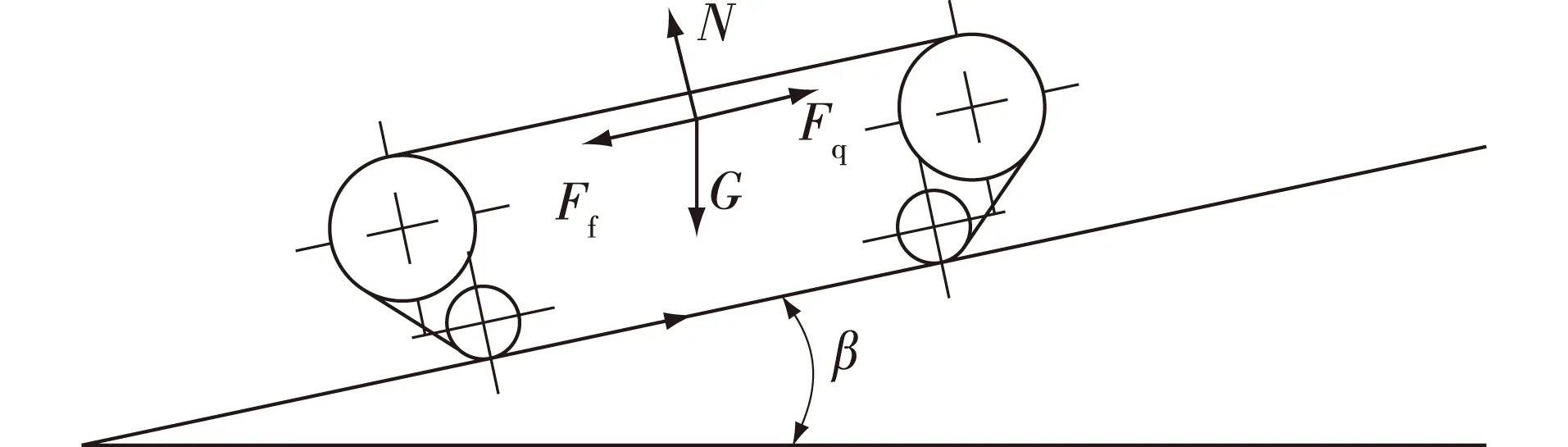
图3 小型抓木机上坡集材受力简图Fig. 3 Force diagram of the timber grab during climbing
图3中各参数依次为:满载时整机的重力G,根据前文取G=10 000N;山体的坡角β,取β=25°[6-7];小型履带集材拖拉机上坡时垂直坡面的分力N;小型履带集材拖拉机上坡与地面间的摩擦阻力系数μ,为保证行驶时动力充足取μ=0.6;小型履带抓木机上坡时行驶阻力Ff:
Ff=μN=μGcosβ
(3)
根据牵引力的平衡关系可得公式(4):
Fq=∑Ff=Ff+Gsinβ=
μGcosβ+Gsinβ=9 664 N
(4)
将相关数据代入公式(2)中,可得到:P= 9.664 kW。
由于抓木机在伐区作业环境恶劣,地形条件复杂,理论设计的功率不足以让抓木机顺利通过。抓木机运行时还会受到空气阻力、传动损耗等其他因素影响,为保证运行时动力充足,保证抓木机在遇到极端地况时能够具有良好的通过性能,应为抓木机留有一定的储备功率[8-10]。为此,抓木机的额定功率设为:
P1=KCP=14.496
(5)
式中:KC为功率储备系数,取KC=1.5,故本设计采用功率为15 kW的柴油机。
4 稳定性分析
小型抓木机由于其质量相对较轻,稳定性成为需要重点考虑的因素。根据相关调查发现,小型抓木机发生的倾翻、滑坡、侧翻等意外事故多发生在坡路上,而纵向行驶时的倾翻和沿横向行驶时的侧翻占据意外事故总数的一半以上[11-13]。为此,本设计主要对抓木机纵向行驶和沿横坡直线行驶、等速转弯行驶状况进行分析,以获得影响抓木机行驶稳定性的各因素间的关系。
4.1 纵向行驶稳定性分析
4.1.1 纵向上坡行驶
小型履带抓木机纵向上坡行驶时受力情况如图4所示。
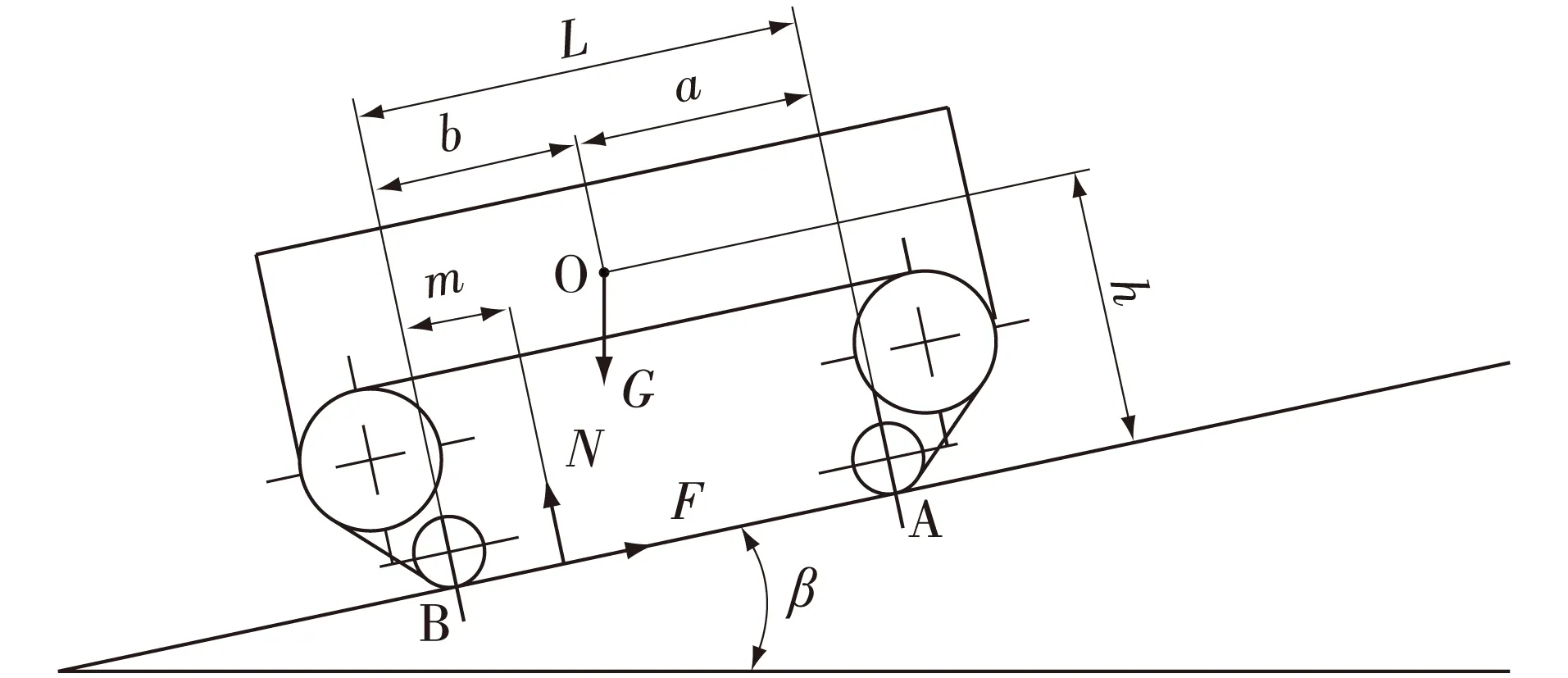
图中:O为质心;G为重力;N为地面对履带垂直反力;m为垂直 反力与支撑点B之间距离;b为质心到支撑点B距离(285 mm); a为质心到支撑点A距离(435 mm);β为横坡角度; h为质心高度(550 mm)。下图同。图4 小型履带抓木机纵向上坡行驶时受力简图Fig. 4 Force diagram of the crawler timber grab during uphill driving
4.1.2 纵向下坡行驶
小型履带抓木机纵向下坡行驶时受力情况见图5。由图5可知,整个小型集材拖拉机受力平衡,对B点取矩可得公式(6):
bGcosβ-hGsinβ-Nm=0→
l=(bcosβ-hsinβ)/cosβ
(6)
如果整机不发生倾翻需使m≥0,即bcosβ-hsinβ≥0,可得不发生倾翻的最大坡度角βm1为:
βm1=arctan(b/h)
(7)
由图5可知,整个小型抓木机受力平衡,对A点取矩可得公式(8):
aGcosβ-hGsinβ-Nm=0→
m=(aGcosβ-hGsinβ)/N
(8)
如果整机不发生倾翻需使m≥0,即acosβ-hsinβ≥0,可得不发生倾翻的最大坡度角βm2为:
βm2=arctan(a/h)
(9)
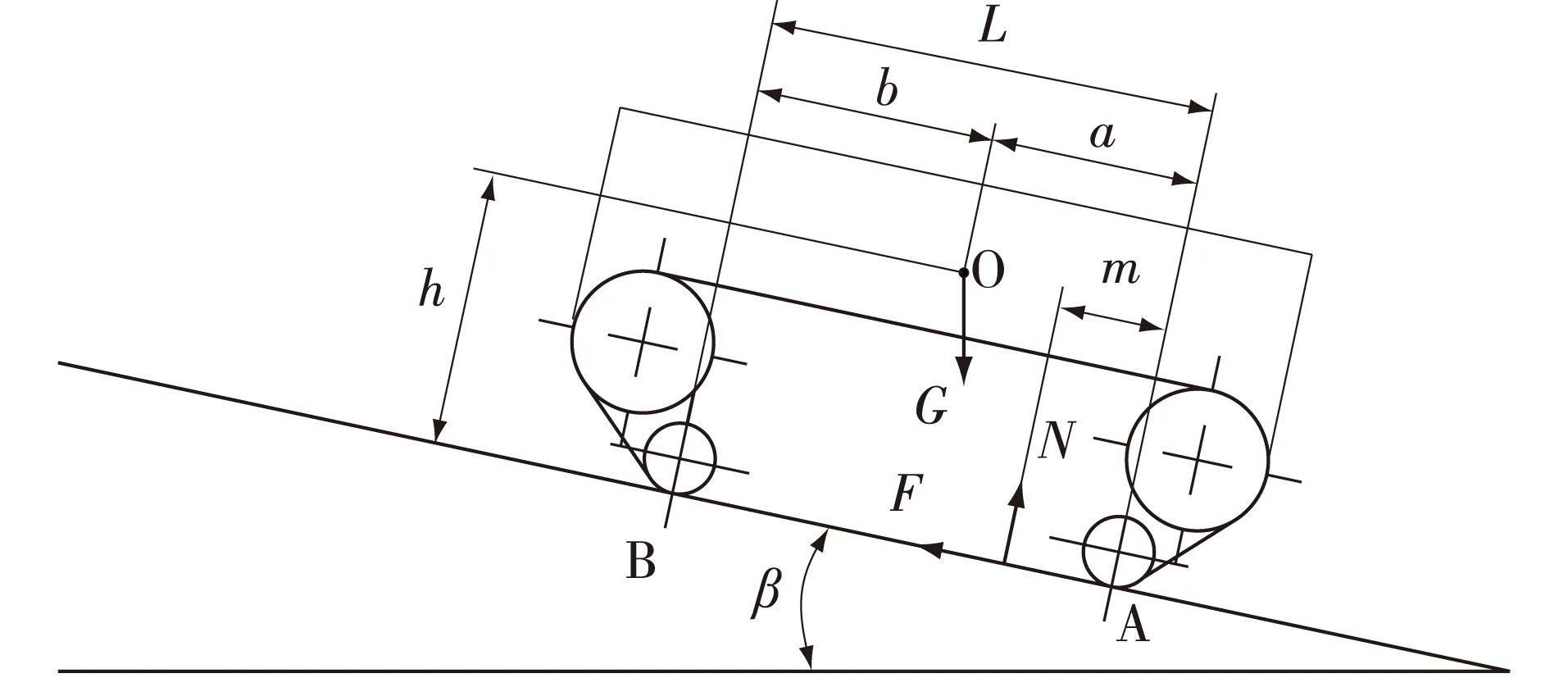
图5 小型履带抓木机纵向下坡行驶时受力简图Fig. 5 Force diagram of the crawler timber grab during downhill driving
分析可得,小型抓木机不论上坡还是下坡行驶时,质心高度h越低,质心距离倾翻支撑点的距离越大,整机越不容易发生倾翻。代入上文给出的数值后,可得βm1=27.4°,βm2=38.3°,所以整机具有很好抗倾翻能力及爬坡能力。
4.2 横向行驶稳定性分析
4.2.1 横向直线行驶
小型履带抓木机横坡行驶时的受力情况如图6所示。
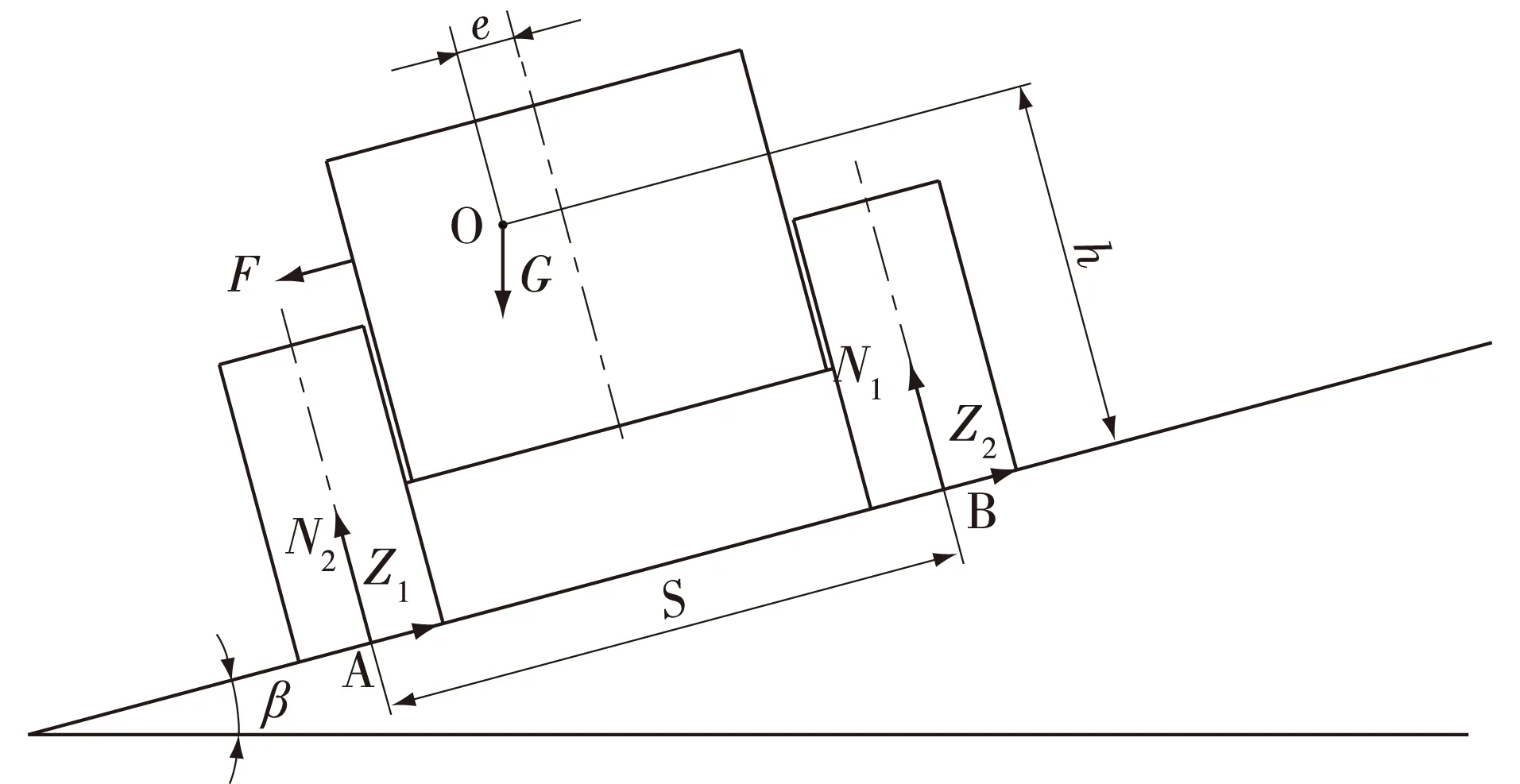
图中:O为质心;F为惯性力;G为重力;Ni为地面对履带垂直反力; Zi为地面作用于履带平行于坡面的力;S为轨距(630 mm);e为 质心偏移距离(35 mm);β为横坡角度;h为质心高度(550 mm)。图6 小型履带抓木机横坡行驶时受力简图Fig. 6 Force diagram of the crawler timber grab perpendicular to the slope
小型抓木机在横坡上行驶,当直线行驶时,F=0,根据整机力矩平衡,对A点取矩可得公式(10):
N1S-Gcosβ(0.5S-e)+Ghsinβ=0→
N1=[Gcosβ(0.5S-e)-Ghsinβ]/S
(10)
如果整机不发生侧翻,则需要使N1≥0,即cosβ(0.5S-e)-hsinβ≥0,可得不发生侧翻的最大坡度角βm为:
βm=arctan[(0.5S-e)/h]
(11)
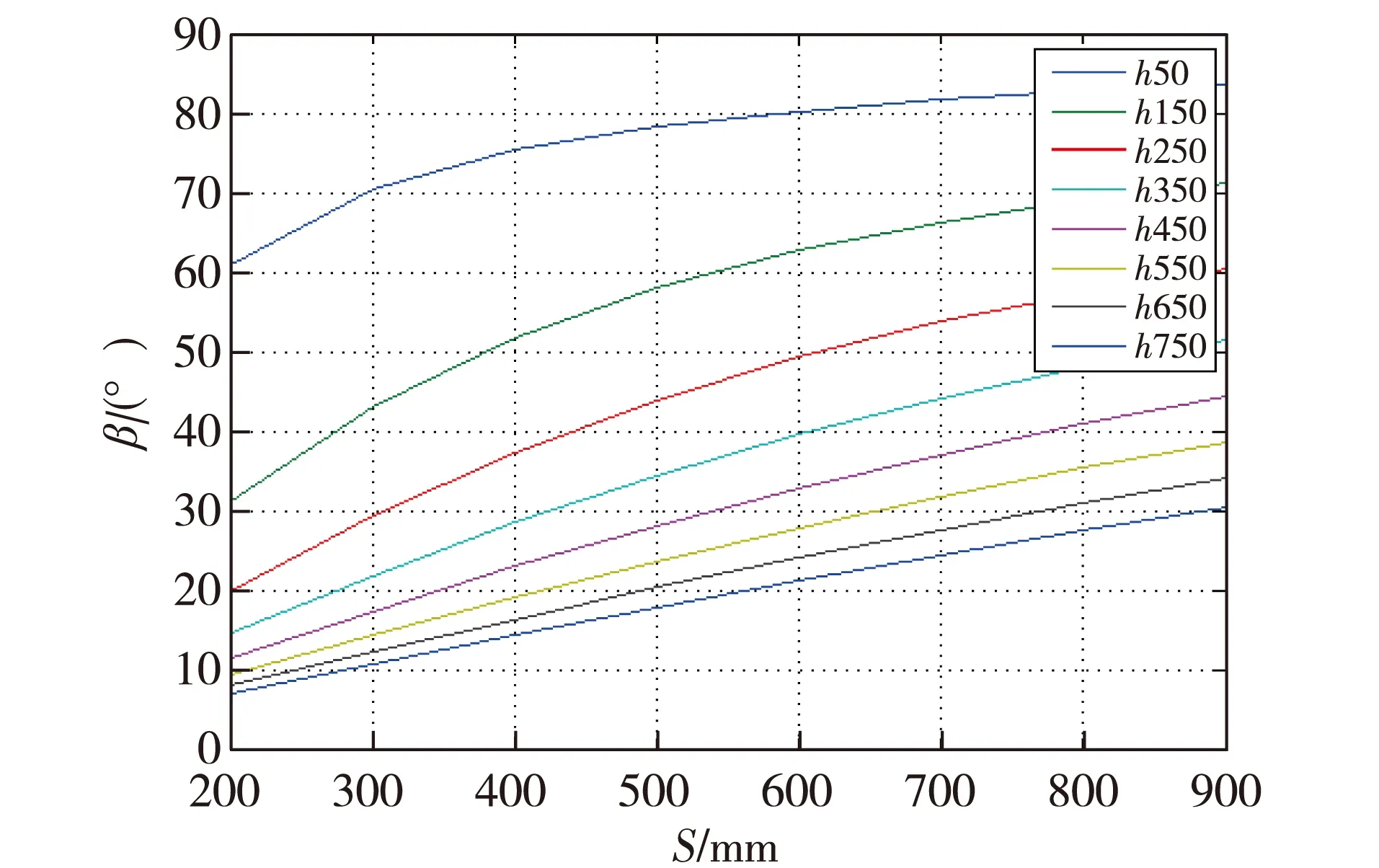
图7 小型抓木机最大爬坡角度与结构参数关系图Fig. 7 relation between the maximum climbing angle and the structure parameters
根据公式(11)使用Matlab软件,绘制最大爬坡角度与抓木机结构参数(S为轨距,h为质心高度,e为质心偏移距离)之间的关系图(图7)。将相应数值代入公式(11),可得βm=29.8°。
4.2.2 横向等速向下坡转向行驶
当抓木机等速转向行驶时,F=Gv2/(gR)(v为行驶速度;R为转弯半径;g为重力加速度常数)[14-16],根据整机平衡和对A点取力矩可得公式(12)和(13):
N1b-Gcosβ(0.5S-e)+
[Gsinβ+Gv2/gR]h=0
(12)
(13)
如果整机不发生侧翻,则需要使N1≥0,即Gcosβ(0.5S-e)-G[sinβ-Gv2/(gR)]h≥0,可得等速转弯行驶时不发生侧翻的最大坡度角βm3为:
tanβm3=tanβm-v2/(gRcosβm3)
(14)
其转弯半径可根据以下公式求得:
(15)
式中:M为转弯瞬心至抓木机中心轴垂直距离,最小值为整机宽度一半,考虑到林区地势特点,此处取600 mm;E为小型履带式抓木机宽度,取E=1 100 mm;d为小型抓木机机最外侧点到前轴的纵向距离,可用轴距代替,取d=1 500 mm。
代入数值得:R=1.89 m。
抓木机不产生倾翻需保证N1≥0,可导出抓木机转向最大行驶速度vm:
(16)
代入相关数值代入公式(16)得最大转弯行驶速度vm=4.74 km/h,小型抓木机的最大行驶速度小于抓木机转向最大行驶速度vm,因此小型抓木机具有良好行驶稳定性。将抓木机最大行驶速度2.7 km/h和βm及其他相应数值代入公式(14),求得转弯行驶时抓木机不发生侧翻的最大坡度角βm3=28.3°。
5 小 结
笔者所设计的间伐材伐区用小型抓木机,整机结构紧凑,尺寸小,可以在株距较小的间伐材伐区行驶,额定功率选用15 kW的柴油机可以保证在运输过程中有充足的动力。总体尺寸1 700 mm×1 100 mm×1 200 mm,保证其行驶过程中不与伐根接触,保证整机能够在伐区自由行驶。该设备横向抗侧翻以及纵向抗侧翻能力较强,因此该设备具有良好的行驶稳定性。所以该设备能够很好地完成木材收集与运输任务,提高伐区作业效率。目前市场上相关的小型设备较少,因此小型抓木机的设计可满足我国林业发展的需求。
[1]罗桂生, 陈勇, 冯建祥. 人工林集材技术探讨[J]. 林业科技开发, 2000, 14(1):47-48. LUO G S, CHEN Y, FENG J X. Artificial forest logging technology[J]. China Forestry Science and Technology, 2000, 14(1):47-48.
[2]吴永波, 刘爽. 土壤压实对土壤性质及植物生长的影响[J]. 林业科技开发, 2010, 24(1):15-17. WU Y B, LIU S. Effects of soil compaction on soil properties and plant growth[J]. China Forestry Science and Technology, 2010, 24(1):15-17.
[3]林文树, 杨德岭, 王立海, 等. 东北人工林履带式和轮式小型拖拉机集材效率分析[J]. 东北林业大学学报, 2014, 42(8):99-103. LIN W S, YANG D L, WANG L H, et al. Efficiencies of tracked tractor and wheeled tractor skidding for northeast forest plantations[J]. Journal of Northeast Forestry University, 2014, 42(8):99-103.
[4]任长清, 马超男, 孟德宇, 等. 履带式林间剩余物运输机的设计[J]. 林业机械与木工设备, 2014, 42(3):18-20. REN C Q, MA C N, MENG D Y, et al. Design of a crawler-type forest residue Conveyor[J]. Forestry Machinery and Woodworking equipment, 2014, 42(3):18-20.
[5]葛晓雯, 侯捷建, 王立海. 集材机可更换三角形履带跨越壕沟动力学仿真分析[J]. 林业工程学报, 2016, 1(1):111-117. GE X W HOU J J WANG L H. Trench-crossing dynamic simulation of the replaceable triangular track of skidder[J] Journal of Forestry Engineering, 2016, 1(1):111-117.
[6]刘泽旭, 王立海, 孙天用, 等. 轮式与三角履带式集材机的爬坡性能比较[J]. 林业科技开发, 2014, 28(6):79-83. LIU Z X, WANG L H, SUN T Y, et al. Comparison of climbing grad-ability between the wheeled skidder and triangle track skidder[J]. China Forestry Science and Technology, 2014, 28(6):79-83.
[7]蒲宏武, 邢俊文, 孟祥政. 等. 基于 RecurDyn的履带式三角形车轮通过性仿真研究[J]. 湖南理工学院学报(自然科学版), 2013. 26(2):24-27. PU H W, XING J W, MENG X Z, et al. Passing ability simulationstudy for tracked triangular wheeled vehicle based on RecurDyn[J]. Journal of Hunan Institute of Science and Technology(Natural Sciences), 2013, 26(2):24-27.
[8]李兆林, 张慧民, 程宏远, 等. 农用拖拉机改装森林抚育集材机[J]. 林业机械与木工设备, 2013, 41(9):56-58. LI Z L, ZHANG H M, CHENG H Y, et al. Transformation of farm tractors into forest cultivation and skidding machinery[J]. Forestry Machinery and Woodworking Equipment, 2013, 41(9):56-58.
[9]王慧, 刘洁, 潘云峰, 等. 微型履带拖拉机越障性能分析[J]. 林业科技, 2014, 39(4):33-37. WANG H, LIN J, PAN Y F, et al. Analysis of the performance of the micro crawler tractor obstacle[J]. Forestry Science and Technology, 2014, 39(4):33-37. [10]余爱华, 赵尘. 基于清洁生产的森林采伐装备分析[J]. 西北林学院学报, 2011, 26(6):173-176. YU A H, ZHAO C. Analysis on forest harvesting equipment of cleaner production[J]. Journal of Northwest Forestry University, 2011, 26(6):173-176.
[11]张建伟, 王立海. 小型环境友好集材装备的研究进展[J]. 森林工程, 2012, 28(4):31-36, 40. ZHANG J W, WANG L H. Research progress of mini-type environ-mental-friendly skidding machine[J]. Forest Engineering, 2012, 28(4):31-36.
[12]吴伟斌, 赵奔, 朱余清, 等. 丘陵山地果园运输机的研究进展[J]. 华中农业大学学报, 2013, 32(4):135-142. WU W B, ZHAO B, ZHU Y Q, et al. Research progress of hilly orchad transporter[J]. Journal of Huazhong Agricultral University, 2013, 32(4):135-142.
[13]朱余清, 洪添胜, 吴伟斌, 等. 山地果园自走式履带运输车抗侧翻设计与仿真[J]. 农业机械学报, 2012, 43(S1):19-23. ZHU Y Q, HONG T S, WU W B, et al. Design and simulation of side rollover resistant capability of tracked vehicle for mountain orchard[J]. Transactions of the Chinese Society for Agricultural Machinery, 2012, 43(S1):19-23.
[14]李勇, 姚宗伟, 王国强. 四履带车辆转向性能仿真研究[J]. 农业机械学报, 2011, 42(2):34-38. LI Y, YAO Z W, WANG G Q. Steering performance simulation of four tracked vehicle[J]. Transactions of the Chinese Society for Agricultural Machinery, 2011, 42(2):34-38.
[15]程军伟, 高连华, 王红岩, 等. 履带车辆转向分析[J]. 兵工学报, 2007, 28(9):1110-1115. CHENG J W, GAO L H, WANG H Y, et al. Analysis on the steering of tracked vehicles[J]. Acta Armamentaril, 2007, 28(9):1110-1115.
[16]迟媛, 蒋恩臣. 履带车辆转向时最大驱动力矩的计算[J]. 农业工程学报, 2009, 25(3):74-78. CHI Y, JIANG E C. Method for calculating maximum traxtive troque of tracked vehicle while steering[J]. Transaxtions of the CSAE, 2009, 25(3):74-78.
The design and analysis of a small timber grab used in thinning plots
YANG Chunmei, ZHAO Hongyuan, SONG Wenlong*, ZHU Xiaoliang, MA Yan
(Forestry and Woodworking Machinery Engineering Technology Center, Northeast Forestry University,Harbin 150040, China)
This paper made an in-depth study of forest logging equipment and logging environment. A small crawler timber grab was designed with the characteristics of small size, light weight, large traction and good climbing performance. It can move flexibly in the forest and is easy to operate. In this paper, the timber grab is introduced in detail, including the structure, the working principle and the required traction and rated power. The driving stability of the timber grab is quantitatively analyzed, and the relationship between the factors that affect the running stability is obtained. By keeping small eccentricity, increasing the gauge and reducing the center of gravity, good driving stability can be obtained. According to the results of calculation, the maximum slope angle of the vertical travel of the timber grab is 27.4°; the maximum gradient of the horizontal moving angle is 28.3°; the maximum turning radius is 1.89 m; and the maximum turning speed is 2.7 km/h. It has been proven that the timber grab can meet the requirements of collecting and transporting wood in thinning plots. It has good driving stability in the forest, and is valuable to the promotion of forestry modernization.
small skidder; design; intermediate cutting; transport; stability analysis
2016-07-09
2016-12-11
国家林业公益性行业科研专项(201404506)。
杨春梅,女,教授,研究方向为林业与木工机械。通信作者:宋文龙,男,教授。E-mail:wlsong@126.com
S776.36
A
2096-1359(2017)03-0112-05
猜你喜欢
文萃报·周二版(2022年23期)2022-06-11
做人与处世(2022年2期)2022-05-26
河北果树(2021年4期)2021-12-02
中南林业科技大学学报(2021年3期)2021-03-23
——以杉木抚育间伐为例
绿色科技(2020年21期)2021-01-08
森林与环境学报(2020年4期)2020-07-27
数位时尚(幼儿教育)(2018年10期)2018-10-30
中国绿色画报(2018年2期)2018-08-07
红蜻蜓·低年级(2016年6期)2016-05-14
绿色科技(2015年10期)2015-11-27