轮毂电机驱动式微型电动汽车驱动防滑控制
2017-06-05 09:34李志远侯顺艳李浩东
河北大学学报(自然科学版) 2017年3期
李志远,侯顺艳,李浩东
(1.河北大学 质量技术监督学院,河北 保定 071002;2.河北大学 电子信息工程学院,河北 保定 071002)
轮毂电机驱动式微型电动汽车驱动防滑控制
李志远1,侯顺艳2,李浩东1
(1.河北大学 质量技术监督学院,河北 保定 071002;2.河北大学 电子信息工程学院,河北 保定 071002)
针对轮毂电机驱动式微型电动汽车的驱动轮过度滑转问题,基于双后轮独立驱动微型电动汽车,从工程化角度设计了汽车驱动防滑模糊PID控制器.首先设计了简化的模糊路面识别方法,然后在Carsim软件中建立了车辆模型,并基于Simulink和Carsim软件建立了联合仿真平台,最后基于联合仿真平台采用以驱动轮转矩为控制量进行了汽车在典型路面的驱动防滑控制仿真实验.实验结果表明,基于路面识别的驱动防滑控制器能够较好地抑制汽车驱动轮过度滑转,提高了汽车行驶的动力性和稳定性.
电动汽车;轮毂电机;驱动防滑;模糊PID控制;联合仿真
汽车驱动防滑控制(ASR)是一种汽车主动安全控制系统,它能够限制汽车在低附着路面加速工况下驱动轮过度滑转,充分发挥地面给驱动轮提供的纵向和侧向附着力,提高汽车的加速能力和横向稳定性.轮毂电机驱动微型电动汽车采用轮毂电机独立驱动,简化了传统汽车的传动机械结构,电机反应速度快、传动效率高,是目前电动汽车的主要研究方向之一[1].电动轮的驱动防滑控制是汽车驱动控制的主要关键技术之一,由于轮毂电机驱动轮转矩和转速容易测得,因此轮毂电机驱动电动汽车的驱动防滑控制较传统汽车更为优越.驱动轮最优滑转率识别是汽车ASR良好控制的关键,目前识别方法多集中于基于路面附着系数-滑转率曲线变化识别[2]和基于模糊控制理论识别路面相似度的加权平均识别[3],这2种算法对于实际控制器的计算量偏大.ASR控制方法主要有门限值控制、PID控制和模糊控制等方法[4].本文从控制器开发工程化角度,基于双后轮独立驱动电动汽车,建立简化的模糊路面识别方法,基于参数化车辆动力学建模软件Carsim建立车辆模型,并采用模糊PID联合控制进行汽车驱动防滑控制研究.
1 电动汽车驱动防滑控制策略
2后轮独立驱动微型电动汽车的驱动防滑控制策略如图1所示,ASR控制器结构如图2所示.驾驶员通过油门踏板和方向盘转角输入驾驶意图,控制器采集汽车4个轮速信号和驱动轮转矩信号,根据驱动轮的运动状态控制电动汽车的起步和加速.滑转率模块通过车轮轮速计算驱动轮实际滑转率,路面识别模块根据计算的实际滑转率和实际路面附着系数进行路面识别,得出当前路面的最优滑转率.当驱动轮滑转率很小时,认为驱动轮不过度滑转,采用电动汽车电子踏板跟随控制;当检测到驱动轮滑转率超过控制门限时,采用以基于驱动轮转矩为控制变量的模糊PID控制,将驱动轮滑转率控制在最优滑转率附近.
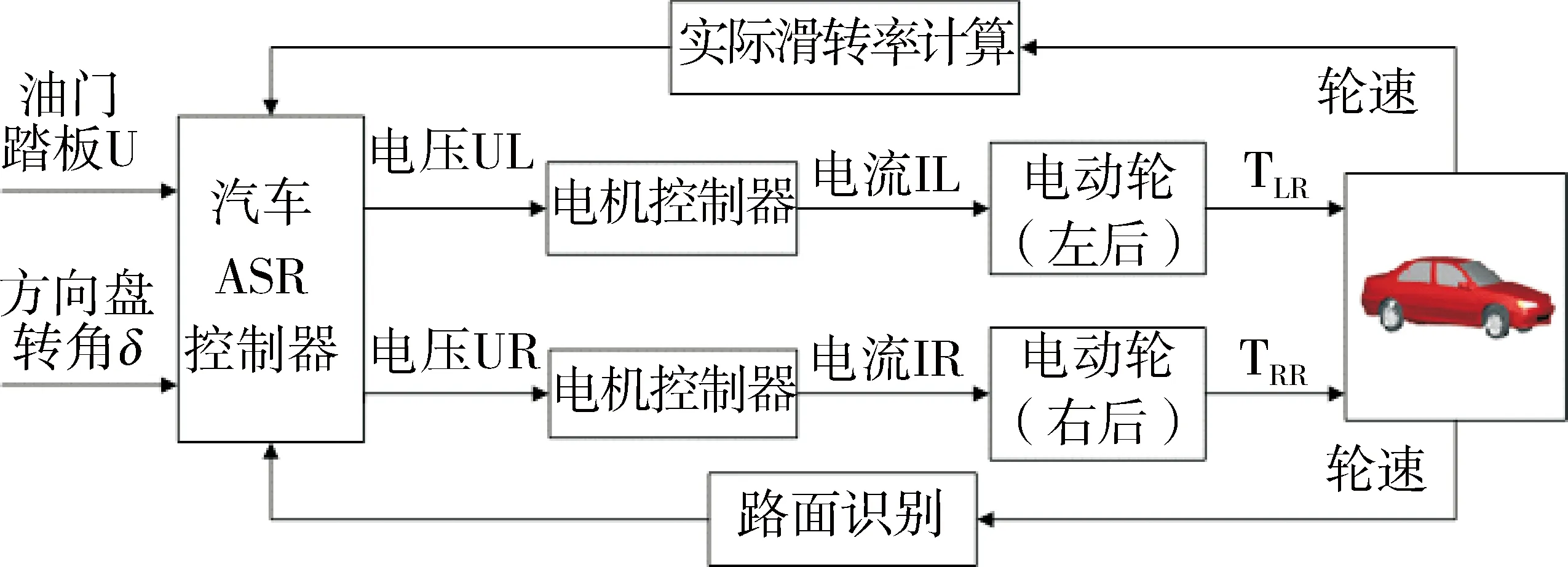
图1 ASR控制策略Fig.1 Structure of ASR control strategy
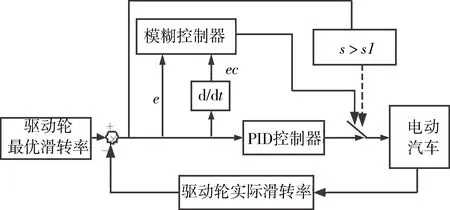
图2 ASR模糊-PID控制器Fig.2 Structure of ASR controller based on fuzzy-PID
2 驱动轮最优滑转率识别
驱动轮最优滑转率识别方法如图3所示,首先根据测得的轮毂电机驱动轮的路面利用附着系数和实际滑转率通过模糊识别获得实时的路面情况,然后基于最优滑转率识别模块确定最优滑转率.
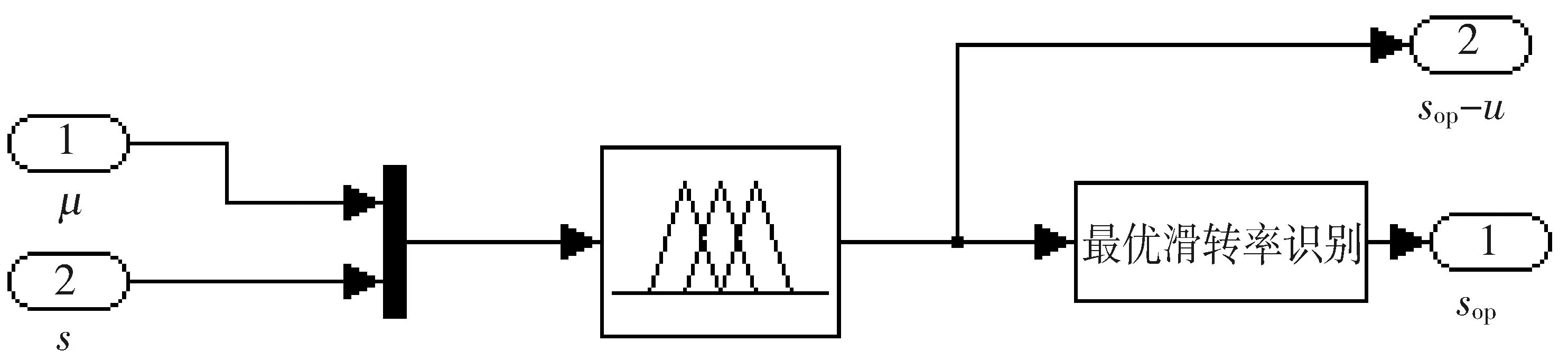
图3 路面识别模糊模型Fig.3 Fuzzy model of road identification
对于2后轮独立驱动的电动汽车,由于轮毂电机驱动轮的驱动力矩和转速可测,车速v可由2非驱动前轮速度均值获得,汽车加速时的驱动轮垂直载荷可以根据文献[5]计算,则驱动轮的路面利用附着系数和滑转率分别可由式(1)和(2)计算.
(1)
(2)

模糊路面识别采用双输入单输出的二维模糊控制器,输入变量分别为驱动轮的路面利用附着系数和滑转率,输出变量为路面类型.驱动轮的利用附着系数论域为[0,1],分别以 VS、S、M、B、VB 代表很小、小、中、大、很大.驱动轮滑转率s的论域为[0,100],分别以 VS、S、M、B、VB 代表很小、小、中、大、很大.路面类型μ论域分别为[0,1],分别以 VL、L、M、H 代表很低、低、中、高.隶属函数如图4所示.采用Mamdani推理形式,模糊控制规则如表1所示.解模糊选择中位数法,输出4种典型路面类型.
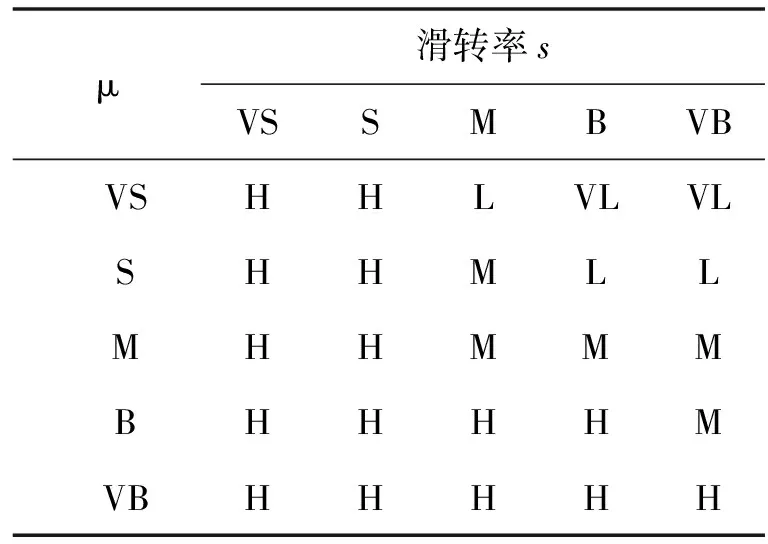
表1 路面识别模糊规则表Tab.1 Fuzzy rules for road identification
由于驱动轮滑转率较小时,标准路面的μ-s曲线区分不明显,不进行路面识别,默认为高附着路面.当驱动轮滑转率较大时,路面识别模块通过模糊推理准确地识别出当前路面类型.
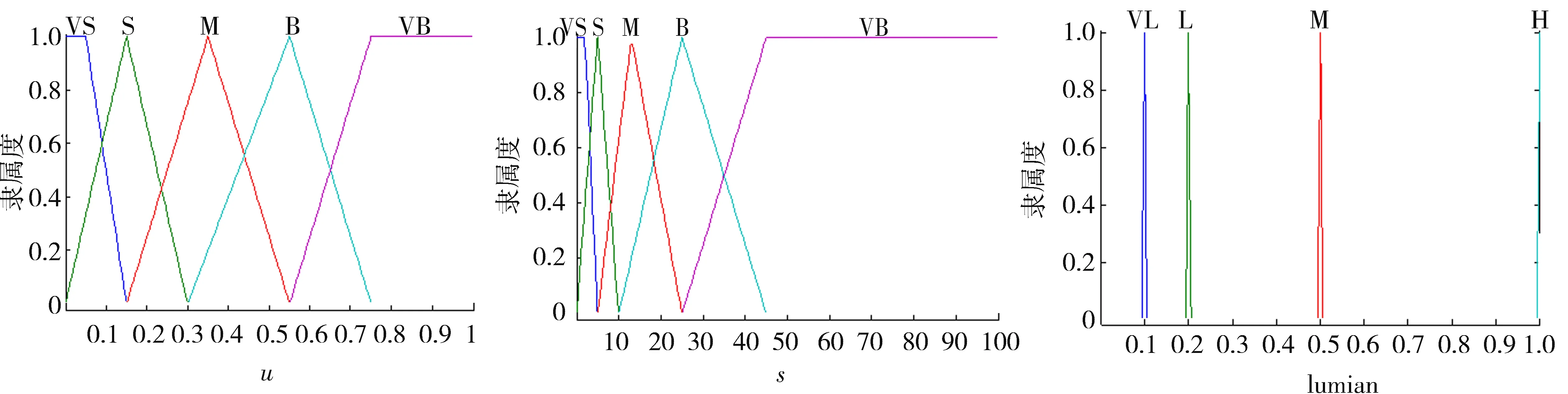
图4 路面识别隶属函数Fig.4 Membership function of road identification
确定路面类型后,从工程化角度考虑,可以根据μ-s函数曲线模型分段确定不同路面的最优滑转率[5].当识别为高附着路面时,最优滑转率sop取20%;当识别为中附着路面时,最优滑转率sop取15%;当识别为低附着及以下路面时,最优滑转率sop取10%.
3 ASR模糊PID控制器设计
本系统采用模糊PID控制算法,输入为驱动轮滑转率偏差,控制量为轮毂电机驱动电压,切换条件为驱动轮滑转率误差,如图2所示.采用双输入单输出的二维模糊控制器,输入语言变量为驱动轮实际滑转率与期望滑转率的误差e及其变化率ec,输出语言变量为轮毂电机驱动电压,如图5所示.实际控制中,驱动轮的滑转率变化范围为0~100,选取误差e的论域为[-15,+85],误差变化率ec的论域为[-210,+210],输出电压U的论域为[0,+6].选取量化因子分别为ke=1/10、kec=1/70和ku=8,输出电压论域为[0,+48V].输出端采用选择开关控制,依据滑转率判断.当滑转率较大时,驱动轮电机控制器输入模糊控制信号.设置误差e的6个语言子项为NB、NS、ZO、PS、PM和PB,分别代表负大、负小、零、正小、正中和正大.设置误差变化率ec和输出语言变量u的模糊子集均分为5级,即NB、NS、ZO、PS、PB和ZO、PS、PM、PB、PVB,分别代表负大、负小、零、正小、正大和零、正小、正中、正大、很大.最终确定输入语言变量(e、ec)和输出语言变量(u)的隶属函数如图6所示.模糊控制器采用Mamdani推理形式,模糊控制规则如表2所示.
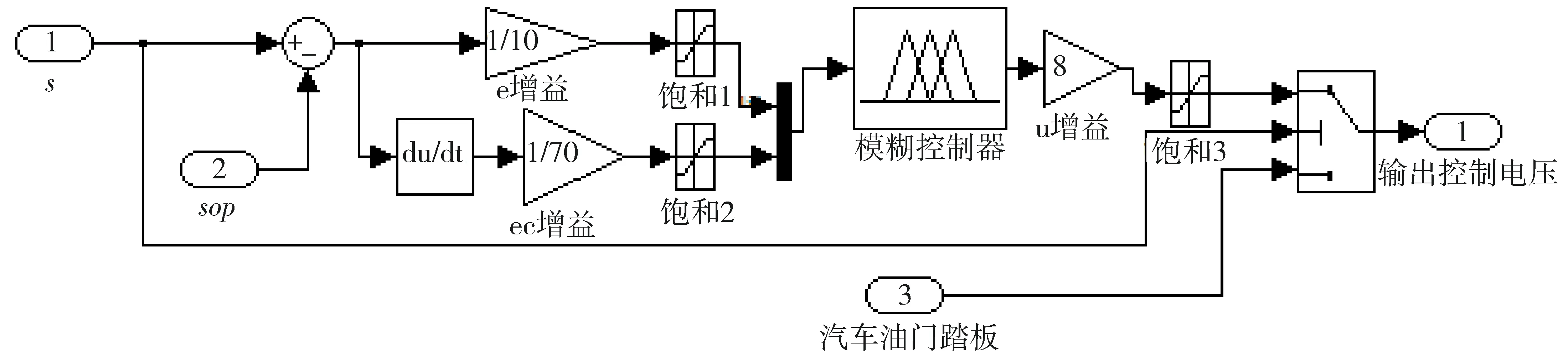
图5 汽车驱动防滑模糊控制器Fig.5 Fuzzy controller of ASR
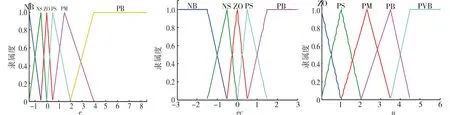
图6 驱动防滑控制隶属函数Fig.6 Membership function of inputs and outputs in ASR
如图2所示,当汽车驱动轮滑转率较小时,采用PID控制方法.输入为驱动轮滑转率偏差,控制量为轮毂电机驱动电压.经过多次调试,选择PID 3个控制参数Kp,Ki,Kd分别为0.6,1.5和2.当滑转率很小时,认为驱动轮不滑转,驱动轮电机控制器输入为油门踏板信号,采用电动汽车电子踏板跟随控制.
4 基于Carsim和Simulink的联合仿真
4.1 电动汽车ASR控制系统建模
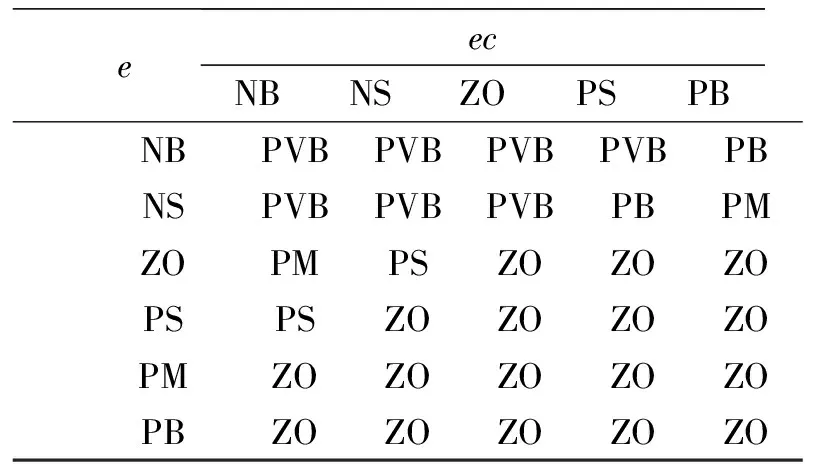
表2 ASR模糊控制规则表Tab.2 Fuzzy rules for ASR control
采用专门用于车辆动力学的结构参数化建模仿真软件CarSim建立2后轮独立驱动微型电动汽车模型,车辆主要参数如表3所示.其中动力部分的发动机和传动系模型由外部动力源轮毂电机代替,电机转矩直接加载至车轮实现动力输入,轮胎模型采用Carsim软件自带的内部轮胎模型[6].由于Carsim 中无法定义车辆模型中的轮毂电机模型、滑转率计算模型、路面识别模型和控制器模型,因此需要将这些模型在Simulink 环境中建立.最后基于Matlab/Simulink和Carsim的环境接口,将车辆模型和控制器模型结合起来,形成基于Carsim和Simulink的ASR系统联合仿真模型.
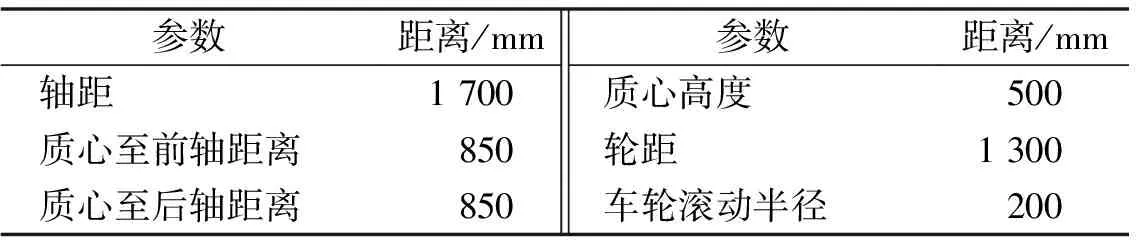
表3 微型电动汽车(450 kg)结构参数Tab.3 Structure parameters of mini electric vehicle
4.2 驱动防滑控制仿真实验及结果分析
为考核本项目控制策略的合理性,分别做了低附着路面、对开路面和对接路面的驱动防滑控制实验.
4.2.1 单一低附着路面实验
选择低附着压实雪路面,附着系数为0.2,油门踩到最大值,汽车原地起步直线加速行驶,仿真时间为25 s.结果见图7,8.
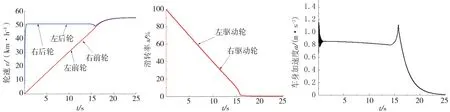
图7 单一低附着路面无ASR仿真实验结果Fig.7 Simulation results without ASR on low adhesion road
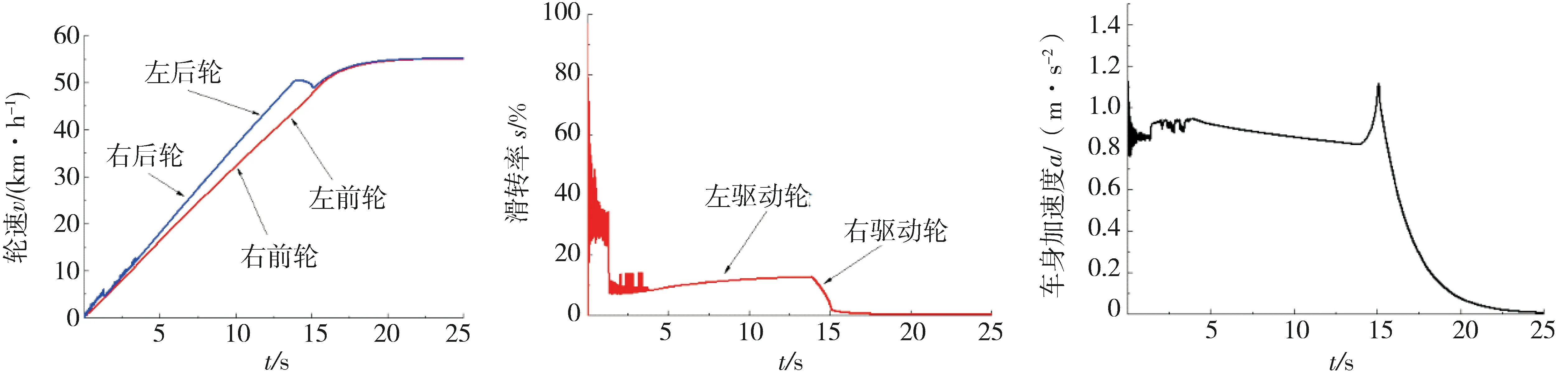
图8 单一低附着路面有ASR仿真实验结果Fig.8 Simulation results with ASR on low adhesion road
由图7、8可以看出,无ASR控制时,由于雪路面附着系数较小,汽车大油门起步加速时,驱动轮迅速打滑.随着车速的增加,驱动轮滑转率缓慢下降,由起步时的100%下降到16 s后的5%以下,平均车身加速度约0.8 m/s2.同样工况有ASR控制时,控制器会迅速调整轮毂电机的输出力矩,在汽车起步2 s后驱动轮滑转率被迅速控制在10%左右,平均车身加速度0.9 m/s2左右.
4.2.2 对开路面实验
选择对开路面,汽车左侧驱动轮所在路面附着系数为0.2,右侧附着系数为0.5,油门踩到最大值,汽车原地起步直线加速行驶.汽车起步时两驱动轮所在路面为附着系数均为0.5,1.5 s后进入对开试验路面,仿真时间为20 s.结果见图9、10.
由图9、10可以看出,无ASR控制,汽车起步时两驱动轮输出的力矩较大,均出现过度滑转.1.5秒后汽车进入对开路面,右侧驱动轮维持原来加速状况,而左侧驱动轮进入附着系数更低的路面,驱动轮滑转加剧,车身加速度由原来的2.4 m/s2降为1.5 m/s2.随着车速的增加,左右驱动轮滑转率分别在5 s和7 s后下降到5%以下.同样工况下有ASR控制,当汽车驱动轮出现过度滑转时,控制器会迅速调整轮毂电机的输出力矩,在对开路面上左右驱动轮滑转率分别控制在15%和10%左右.起步时车身加速度2.9 m/s2左右,对开路面车身加速度降为1.8 m/s2左右.
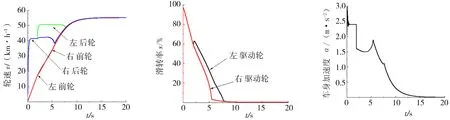
图9 对开路面无ASR仿真实验结果Fig.9 Simulation results without ASR on split road
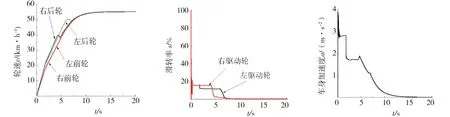
图10 对开路面有ASR仿真实验结果Fig.10 Simulation results with ASR on split road
4.2.3 对接路面实验
选择对接路面,高附着路面附着系数为0.8,低附着路面附着系数为0.2.油门踩到最大值,汽车原地起步直线加速行驶,仿真时间为20 s.汽车通过的对接路面分为3段,0~5 m为高附着路面,5~35 m为低附着路面,35~500 m为高附着路面.
图11为无ASR控制的仿真结果,图12为有ASR控制的仿真结果.由图11、12可以看出,无ASR控制时,汽车在高附着路面起步加速,两驱动轮驱动力矩过大,出现过度滑转,随着车速的增加,驱动轮滑转率缓慢下降.2秒后汽车进入低附着路面,两驱动轮迅速出现很大滑转,驱动轮滑转率再次上升为42%,车身加速度由原来的4.25 m/s2降为0.9 m/s2.5 s后汽车再次进入高附着路面,两驱动轮驱动轮滑转率降到5%以下,车身加速度也提高到5.5 m/s2.同样工况下有ASR控制,当驱动轮出现过度滑转时,控制器会迅速调整轮毂电机的输出力矩,驱动轮滑转率控制在5%左右,车身加速度6 m/s2左右.2 s后汽车进入低附着路面,两侧驱动轮滑转率控制在10%左右,车身加速度降为0.9 m/s2.5 s后汽车再次进入高附着路面,驱动轮滑转率迅速下降,车身加速度也提高到5 m/s2.

图11 对接路面无ASR仿真实验结果Fig.11 Simulation results without ASR on docking road
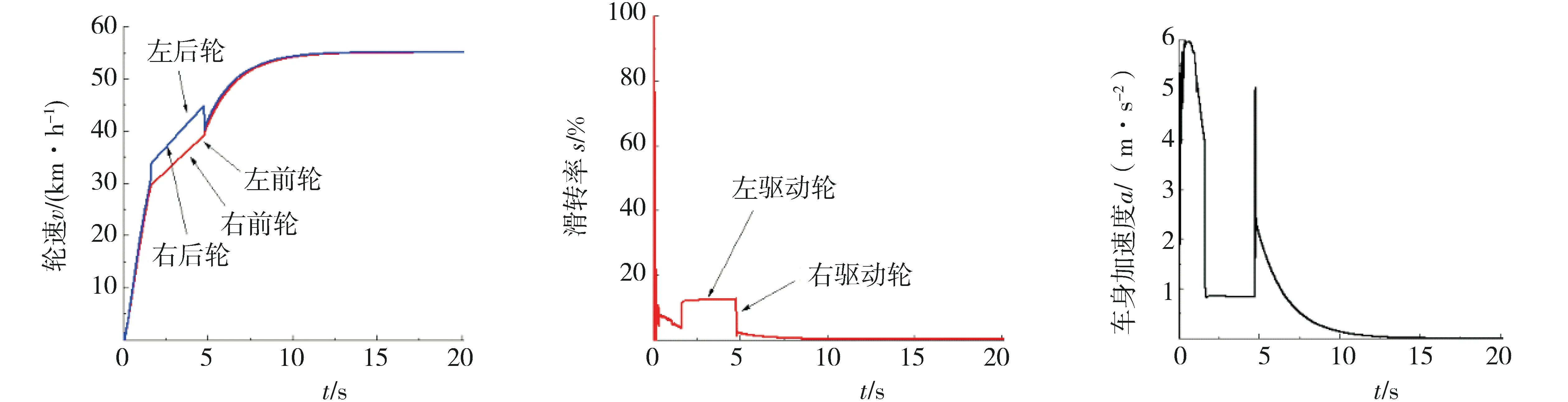
图12 对接路面有ASR仿真实验结果Fig.12 Simulation results with ASR on docking road
5 结论
从工程化角度对双后轮独立驱动微型电动汽车的驱动防滑控制进行了研究.设计了简化模糊路面识别方法和模糊PID控制器,在参数化车辆动力学建模软件Carsim中建立了车辆模型,并基于Simulink和Carsim软件建立了联合仿真平台,进行了以驱动轮转矩为控制量的典型路面汽车驱动防滑控制仿真实验,验证了控制策略的有效性.
[1] 李刚,宗长富.四轮独立驱动轮毂电机电动汽车研究综述[J].辽宁工业大学学报(自然科学版),2014,34(1):47-52.DOI:10.15916/j.issn.1674-3261.2014.01.009. LI G,ZONG C F.Review on electric vehicle with four-wheel independent drive in-wheel motors [J].Journal of liaoning university of Technology (Natural Science Edition),2014,34(1):47-52.DOI:10.15916/j.issn.1674-3261.2014.01.009.
[2] 王博,卢萍萍,管欣,等.路面附着系数识别方法发展现状综述[J].汽车技术,2014,8:1-7,37. WANG B,LU P P,GUAN X,et al.A review on the development status of road adhesion coefficient identification approach[J].Automotive Technology,2014,8:1-7,37.
[3] 李刚,宗长富,张强,等.基于模糊路面识别的4WID电动车驱动防滑控制[J].华南理工大学学报( 自然科学版),2012,40(12):99-104.DOI:123939/j.issn.1000-565X.2012.12.017. LI G,ZONG C F,ZHANG Q,et al.Acceleration slip regulation control of 4WID electric vehicles based on fuzzy road identification[J].Journal of South China University of Technology (Natural Science Edition),2012,40(12):99-104.DOI:123939/j.issn.1000-565X.2012.12.017.
[4] 魏来.电动汽车驱动防滑控制方法研究[D].沈阳:沈阳工业大学,2016. WEI L.The electric car drive torque control method research[D].Shenyang:Shenyang University of Technology,2016.
[5] 李志远,侯顺艳,李贺.基于扭矩传感器的汽车驱动轮最佳滑转率测定[J].河北大学学报(自然科学版),2014,34(5):547-552.DOI:10.3969/j.issn.1000-1565.2014.05.018. LI Z Y,HOU S Y,LI H.Measuring optimal acceleration slip rate based on wheel torque sensor[J].Journal of Hebei University (Natural Science Edition),2014,34(5):547-552.DOI:10.3969/j.issn.1000-1565.2014.05.018.
[6] 熊璐,陈晨,冯源.基于Carsim/Simulink 联合仿真的分布式驱动电动汽车建模[J].系统仿真学报,2014,26(5):1143-1148,1155.DOI:10.1618 2/j.cnki.joss.2014.05.011. XIONG L,CHEN C,FENG Y.Modeling of distributed drive electric vehicle based on co-simulation of Carsim/Simulink [J].Journal of System Simulation,2014,26(5):1143-1148,1155.DOI:10.1618 2/j.cnki.joss.2014.05.011.
(责任编辑:王兰英)
Acceleration slip regulation of mini electric vehicle with in-wheel motors
LI Zhiyuan1,HOU Shunyan2,LI Haodong1
(1.College of Quality and Technical Supervision,Hebei University,Baoding 071002,China;2.College of Electronic and Informational Engineering,Hebei University,Baoding 071002,China)
In order to accomplish acceleration slip regulation of mini electric vehicle with in-wheel motors,a fuzzy-PID controller is designed for electric vehicle with two rear-wheel independent drive in view of engineering applications.First a simplified fuzzy road identification method is designed,then vehicle model is established based on Carsim software,and the co-simulation platform is built based on Simulink and Carsim software,finally the experiments have been done in typical roads with driving wheel torque as control variable based on the co-simulation platform.The simulation results show that the controller can effectively restrain the excessive slip of driving wheel,and improve dynamic performance and stability of the vehicle based on road identification.
electric vehicle;in-wheel motor;acceleration slip regulation;fuzzy-PID control;co-simulation
2016-09-29
河北省科技计划项目(13212206)
李志远(1975-),男,河北保定人,河北大学副教授,主要从事汽车主动安全控制和电动汽车驱动技术研究. E-mail: lzyhsy@126.com
10.3969/j.issn.1000-1565.2017.03.016
U469.72;TP27
A
1000-1565(2017)03-0322-07
猜你喜欢
汽车实用技术(2022年5期)2022-04-02
汽车实用技术(2022年5期)2022-04-02
上海涂料(2021年5期)2022-01-15
汽车维修与保养(2021年8期)2021-02-16
中国新技术新产品(2020年4期)2020-05-05
动漫星空(兴趣百科)(2019年3期)2019-03-07
制造技术与机床(2017年10期)2017-11-28
制造业自动化(2017年2期)2017-03-20
科技创新导报(2016年27期)2017-03-14
海外星云(2016年17期)2016-12-01