
具有时变时延和丢包的网络控制系统H∞控制
2017-06-05 14:15周颖,郑凤,何磊
计算机技术与发展 2017年5期
周 颖,郑 凤,何 磊
(南京邮电大学 自动化学院,江苏 南京 210003)
具有时变时延和丢包的网络控制系统H∞控制
周 颖,郑 凤,何 磊
(南京邮电大学 自动化学院,江苏 南京 210003)
针对一类同时具有时变时延和丢包的网络化控制系统,设计使得闭环系统均方意义下指数稳定的H∞状态反馈控制器,并且满足给定的H∞性能指标。已知系统从传感器到控制器之间通道具有数据包丢失和时变时延,控制器到执行器通道具有时变时延。假设网络诱导总时延小于等于一个采样周期,将时延的时变系数转换为系统参数矩阵的不确定性,因此系统被建模为范数有界的不确定系统。使用Bernoulli随机序列描述数据包丢失且数据丢失概率已知。基于线性矩阵不等式(LMI)方法和李雅普诺夫(Lyapunov)稳定性原理,给出并证明了所设计控制器存在的充分条件,并将控制器设计问题转换为求解线性矩阵不等式可行解的问题。最后给出了仿真实例,验证了采用的设计控制器方法的有效性和可行性。
时变时延;丢包;网络控制系统;H∞控制;线性矩阵不等式
0 引 言
在过去十年中,通信、计算机以及控制技术的飞速发展,大大地影响了控制系统的结构。随着控制对象复杂度的增加,控制区域的扩大,传统的控制系统已经满足不了复杂的需求。因此,网络控制系统(NCS)应运而生[1-3]。
在NCS给人们带来极大便利的同时,由于网络自身的特性,也给设计和分析NCS带来了麻烦。其中突出的两个问题就是时延和丢包。网络控制系统在数据传输过程中往往伴随着时延和丢包。设计一个现实的NCS必须要考虑到时延和丢包对系统的影响,否则将会导致系统性能下降甚至失稳[4-7]。
关于网络控制系统丢包和时延的问题,很多文献都给出了解决方法[8-10]。文献[11]考虑了传感器到控制器之间的时延和丢包,用Markov随机序列描述数据丢失并且设计了一个状态反馈控制器使得系统达到稳定。文献[12]用Bernoulli随机序列描述丢包,丢包的概率属于一个已知的区间。文献[13]针对具有随机时延的NCS设计H∞控制器,随机时延满足Bernoulli随机序列。文献[14]假设系统时延恒定,将系统动态地分成多种情况来考虑,用多个子系统描述不同丢包情况下的网络化系统模型。
文献[15]假设网络控制系统的时延为一步时延,方便了对系统的分析,却人为地增加了网络时延。文献[16]在处理时延时,采用在控制器和执行器接收端设置缓冲区的方法,随机时延即被转为确定时延,实际处理的时延是定常时延。文献[17]讨论了具有一步时延和丢包的网络控制系统的H∞滤波器的设计问题,用两个不相关的Bernoulli随机序列分别描述一步时延和丢包。
现如今,针对具有时延和丢包的网络控制系统的研究已经有很多成果,但仍然存在不足。网络诱导时延由前向通道和反馈通道的时延组成,上述有些文献只解决了前向通道的时延。有些文献只考虑时延或丢包其中一种情况下NCS的控制问题。而有的文献即使同时考虑到时延和丢包,但均是假设网络诱导时延是已知的常数。事实上,时延和丢包总是同时发生的,而且时延并不一定是常数,丢包也具有随机性。
针对上述情况,研究了具有时延和丢包的网络控制系统的H∞控制。不仅考虑了传感器到控制器的时延,也考虑了控制器到执行器之间的时延,并且假设时延是时变的,将未知的时延变量处理成系统参数的不确定性,利用Bernoulli随机序列描述数据丢失。通过LMI和Lyapunov函数给出了H∞控制器存在的充分条件。
1 问题描述
具有时延和丢包的网络控制系统的结构如图1所示。

图1 系统结构图
图中,τsc表示传感器到控制器通道之间的时延,τca表示控制器到执行器通道之间的时延。网络诱导总时延为τk(τk=τsc+τca)。文中时延考虑为时变短时延,所以τk∈[0,T],T为一个采样周期。假设丢包发生在前向通道,满足Bernoulli随机序列且概率已知。

(1)
其中,α(k)是一个Bernoulli随机序列,其值可取0或1,满足如下概率:

(2)

考虑如下的线性时不变系统:
(3)
其中,u(t)∈Rm,x(t)∈Rn,y(t)∈Rp,z(t)∈Ro,ω(t)∈Rq分别表示控制输入、系统状态、系统输出、控制输出和外部干扰;A,B,C,G,H,M为具有适当维数的已知矩阵。
对方程(3)进行离散化,得到:
(4)
其中:
(5)
其中,λ1,λ2,…,λn为矩阵A的特征值;Λ1,Λ2,…,Λn是矩阵A的特征向量。
F(τk)满足:
FT(τk)F(τk)≤I
(6)
针对系统(3),设计如下的状态反馈控制器:

(7)
将式(7)代入式(4),得到闭环控制系统的方程为:
(8)
针对闭环控制系统(8),设计形如式(7)的控制器,满足:
(1)闭环系统(8)均方意义下指数稳定;
(2)零初始条件下,系统控制输出满足:
(9)
其中,γ给定且大于0。
以下是证明闭环系统(8)稳定性时用到的引理:

引理2:V(x(k))为Lyaponuv函数,如果存在正实数λ≥0,μ>0,ν>0和0<ψ<1满足:
μ‖x(k)‖2≤V(x(k))≤v‖x(k)‖
E{V(x(k+1))|x(k)}-V(x(k))≤
λ-ψV(x(k))
(10)
那么有:

(11)

(12)
则存在任意正数ε使得:

(13)
2 主要结果
当ω(k)=0时,对于系统(8),得到定理1。

(14)
其中:
(15)
那么系统(8)均方意义下指数稳定。
证明:ω(k)=0时,构造如下的Lyaounov函数:
V(x(k))=xT(k)Px(k)+xT(k-1)Qx(k-1)
(16)
可得:
V(x(k+1))=xT(k+1)Px(k+1)+xT(k)Qx(k)
(17)
式(16)与式(17)两项作差可得:
取ηT(k)=[x(k),x(k-1)]T,因为E{α(k)-α}=0,E{(α(k)-α)2}=(1-α)α=β2,令M1=B0+DF(τk)E,M2=B1-DF(τk)E,得到:

[Adx(k)+(α(k)-α)M1Kx(k)+αM1Kx(k)+(α(k)-α)M2Kx(k-1)+αM2Kx(k-1)]TP[Adx(k)+ (α(k)-α)M1Kx(k)+αM1Kx(k)+ (α(k)-α)M2Kx(k-1)+αM2Kx(k-1)]+xT(k)Qx(k)-xT(k)Px(k)-xT(k-1)Qx(k-1)= [Adx(k)+αM1Kx(k)+αM2Kx(k-1)]TP[Adx(k)+αM1Kx(k)+αM2Kx(k-1)]+β2[M1Kx(k)]TP[M1Kx(k)]+β2[M1Kx(k)]TP[M2Kx(k-1)]+β2[M2Kx(k-1)]TP[M1Kx(k)]+β2[M2Kx(k-1)]TP[M2Kx(k-1)]+xT(k)Qx(k)-xT(k)Px(k)-xT(k- 1)Qx(k-1)=ηT(k)θ1η(k)
(18)
由Schur补引理可知,式(14)等价于θ1<0,得到:
E{V(x(k+1)|x(k))}-V(x(k))=ηT(k)θ1η(k)≤-λmin(θ1)ηT(k)η(k)< -γηT(k)η(k)
(19)
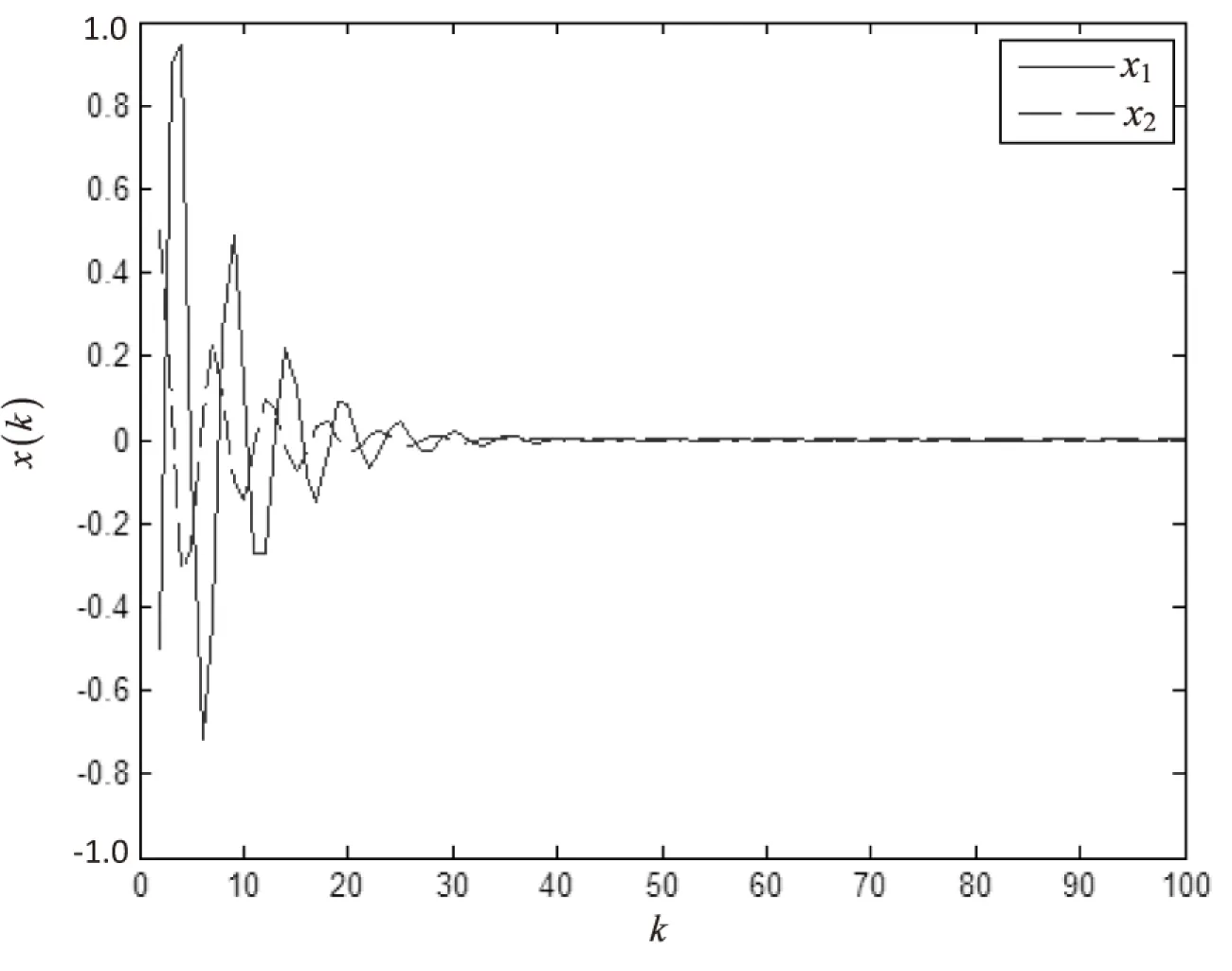
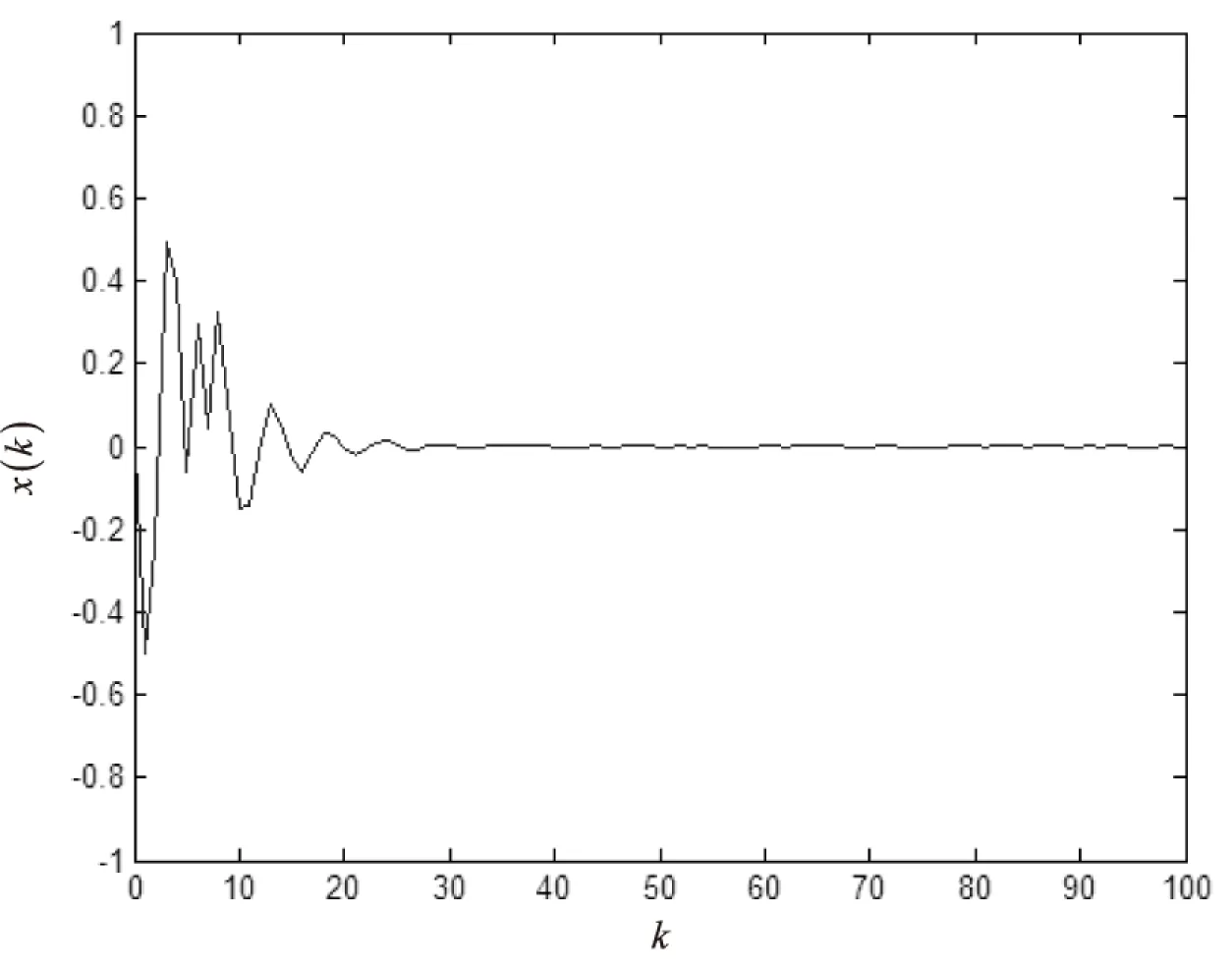
其中,0<γ 令σ=λmax(P),得到: E{V(x(k+1)|x(k))}-V(x(k))< (20) 由引理1和引理2可知,闭环控制系统(8)均方意义下指数稳定。 ω(k)≠0时,对于闭环系统(8)设计满足均方意义下指数稳定的H∞控制器,给出定理2和定理3。 定理2:对式(8),干扰输入ω(k)≠0,给定γ>0,若存在正定对称矩阵P,Q和增益矩阵K,满足: (21) 那么系统(8)均方意义下指数稳定且满足H∞性能。 证明:当ω(k)=0时,容易证得闭环系统(8)均方意义下指数稳定。 当ω(k)≠0时,取Lyapunov函数V(x(k))=xT(k)Px(k)+xT(k-1)Qx(k-1),取ηT(k)=[x(k),x(k-1),ω(k)]T,进而得到: (22) 由Schur补引理可知,式(21)等价于θ2<0,此时有 E{V(0)}-E{V(∞)},由零初始条件可知E{V(0)}=0,得到: (23) 证毕。 定理3:给定γ>0,ε>0,对于系统(8),若存在正定对称矩阵X,Y和矩阵Z满足: (24) 那么系统(8)均方意义下指数稳定且满足H∞性能。 证明:由式(21)可知: (25) 左右同乘diag{P-1,P-1,I,I,βI,I,I},令Y=P-1QP-1,X=P-1,Z=KP-1。不等式(25)可化为式(24)。由引理1可知,闭环系统(8)均方意义下指数稳定且满足给H∞性能。证毕。 考虑如下的控制对象: (26) 令F(τk)中的α1=0,α2=0。 根据如上假设,可以得到: 给定γ=1,ε=4,通过Matlab中的LMI工具求解式(24)得出: 当ω(k)=0时,由Matlab仿真工具可得闭环系统的状态响应图,如图2所示。 图2 ω(k)=0时闭环系统的状态响应图 与此同时,可以得到: 满足H性能指标。由图可以看出系统是稳定的,所以采用的方法是可行的。 图3 ω(k)≠0时闭环系统的状态响应图 图4 ω(k)≠0时闭环系统的输出响应图 对于同时具有时延和丢包的网络控制系统,假设时延存在于传感器到控制器之间和控制器到执行器之间且时延是时变的。将时变短时延系统建模成含有不确定参数的系统。利用Lypunov稳定性原理和LMI方法给出并证明了H∞控制器存在的充分条件。由仿真实例证明了设计的控制器是可行有效的。 [1] 陈志明,崔宝同.数据包丢失的无线网络控制系统的故障检测[J].计算机技术与发展,2012,22(11):61-64. [2]HetelL,DaafouzJ,IungC.Stabilizationofarbitraryswi-tchedlinearsystemswithunknowntime-varyingdelays[J].IEEETransactionsonAutomaticControl,2006,51(10):1668-1674. [3]JungEH,LeeHH,SuhYS.LMI-basedoutputfeedbackcontrolofnetworkedcontrolsystems[C]//IEEEinternationalworkshoponfactorycommunicationsystems.[s.l.]:IEEE,2004:311-314. [4]ZhangY,TangGY,HuNP.Non-fragilecontrolfornonlinearnetworkedcontrolsystemswithlongtime-delay[J].Computers&MathematicswithApplications,2009,57(10):1630-1637. [5]ZhangHK.Non-fragileguaranteed-costrobusth-infinitycontrolforaclassofnonlinearnetworkedcontrolsystemswithlongtime-delay[C]//2010internationalconferenceonintelligentcomputationtechnologyandautomation.[s.l.]:IEEE,2010:784-787. [6]FridmanE,ShakedU.AdescriptorsystemapproachtoH∞controloflineartime-delaysystems[J].IEEETransactionsonAutomaticControl,2002,47(2):253-270. [7]ChenZP,LiuL,ZhangJF.Observerbasednetworkedcontrolsystemswithnetworked-inducedtimedelay[C]//Internationalconferenceonsystems.[s.l.]:IEEE,2004:3333-3337. [8]MahmoudMS,KhanGD.DynamicoutputfeedbackofnetworkedcontrolsystemswithpartiallyknownMarkovchainpacketdropouts[J].OptimalControlApplicationsandMethods,2015,34(5):505-634. [9] 黄 鹤,韩笑冬,谢德晓,等.具有数据包丢失的网络控制系统主动容错控制[J].控制与决策,2009,24(8):1126-1131. [10]DasguptaS,HalderK,BanerjeeS,etal.StabilityanalysisandcontrollersynthesisofNetworkedControlsystem(NCS)witharbitrarypacketdrop-outs[C]//2ndinternationalconferenceonelectronicsandcommunicationsystems.[s.l.]:IEEE,2015:217-222. [11] 马卫国,邵 诚.网络控制系统随机稳定性研究[J].自动化学报,2007,33(8):878-882. [12] 阮玉斌,杨富文,王 武.测量丢失概率不确定的网络化系统的鲁棒故障检测[J].控制与决策,2008,23(8):894-899. [13]YangFW,WangZD,HungYS,etal.H∞controlfornetworkedsystemswithrandomcommunicationdelays[J].IEEETransactionsonAutomaticControl,2006,51(3):511-518. [14] 邱占芝,张庆灵,连志春,等.存在时延和数据包丢失情况下状态反馈网络控制系统的指数稳定性[J].信息与控制,2005,34(5):567-575. [15]ZhouY,ZhuYJ.Controlforuncertaindiscrete-timesystemwithdatapacketdropoutsandonestepdelay[C]//34thChinesecontrolconference.[s.l.]:[s.n.],2015:6777-6781. [16] 于之训,陈辉堂.时延网络控制系统均方指数稳定的研究[J].控制与决策,2000,15(3):278-281. [17] 李秀英,王金玉,孙书利.具有一步随机时滞和多丢包的网络系统H∞滤波器设计[J].自动化学报,2014,40(1):155-160. H∞ Control of Networked Control Systems with Time-varyingDelay and Packet Dropout ZHOU Ying,ZHENG Feng,HE Lei (College of Automation,Nanjing University of Posts and Telecommunications,Nanjing 210003,China) For a class of networked control systems with time-varying delay and packet dropout,aH∞controllerisdesignedinordertomaketheclosed-loopsystemmeansquarestableandmeettheprescribedH∞disturbanceattenuationlevel.Itisknownthatthesystemhasdatapacketlossandtime-varyingdelayfromthesensortothecontroller,andtimevaryingdelayfromthecontrollertoactuator.Thetotaltimedelayislessthanonesamplingperiod.Theuncertaintyofdelayisturnedintotheunknownparametersofthesystemequationsothatthesystemismodeledasanormboundeduncertainsystem.DatapacketdropoutisassumedtobesatisfiedwiththeBernoullidistributionsequencewithknownprobability.SufficientconditionsfortheexistenceofthestatefeedbackcontrolleraregivenbylinearmatrixinequalityandLyapunovprinciple.Andthecontrollerdesignproblemistransformedintosolvingthefeasiblesolutionofthelinearmatrixinequality.Asimulationexampleisgiventoprovetheeffectivenessandfeasibilityofthedesignmethod. time-varying delay;packet dropout;networked control system;H∞control;linearmatrixinequality 2016-05-31 2016-09-02 网络出版时间:2017-03-13 国家自然科学基金资助项目(61104103,61102155) 周 颖(1978-),女,博士,副教授,硕士生导师,研究方向为网络化控制系统的分析与设计、复杂大系统的自适应控制、非线性系统的控制理论及应用;郑 凤(1992-),女,硕士研究生,研究方向为网络化控制系统的分析与设计。 http://kns.cnki.net/kcms/detail/61.1450.tp.20170313.1545.032.html TP A 1673-629X(2017)05-0164-06 10.3969/j.issn.1673-629X.2017.05.034

3 仿真实例




4 结束语
猜你喜欢
科技风(2021年19期)2021-09-07
中国交通信息化(2020年4期)2021-01-14
今日中国·法文版(2020年7期)2020-07-04
自动化学报(2019年12期)2020-01-19
中国特种设备安全(2019年9期)2019-12-03
中国惯性技术学报(2019年3期)2019-10-15
自动化学报(2017年4期)2017-06-15
智富时代(2017年4期)2017-04-27
智富时代(2017年4期)2017-04-27
探测与控制学报(2015年4期)2015-12-15
