
带粘弹性阻尼器的斜拉索动力混合仿真
2017-06-01 11:29曹志威徐志洪李成盛
华北地震科学 2017年2期
曹志威, 徐志洪, 张 祁, 董 成, 李成盛
(南京理工大学,江苏 南京 210000)
带粘弹性阻尼器的斜拉索动力混合仿真
曹志威, 徐志洪, 张 祁, 董 成, 李成盛
(南京理工大学,江苏 南京 210000)
利用MATLAB程序编写了针对带粘弹性阻尼器的斜拉索结构地震响应的计算软件,同时利用Visual C++语言开发了PCS8000控制器与计算软件之间的接口通讯软件(PMI),建立起了数值子结构与试验子结构之间数据传输的桥梁。通过MATLAB程序纯理论计算与混合仿真实验的比较,证明实验结果与纯数值计算的一致性,从而验证了斜拉索结构混合仿真的可靠性。
斜拉索;MATLAB程序;混合仿真;接口通讯软件PMI
0 引言
混合仿真试验方法是在子结构拟动力试验方法的基础上发展而来的,吸收了拟静力实验方法和地震模拟振动台方法的优势,弥补了子结构拟动力试验方法的不足[1],结合计算机辅助软件,实现结构的地震模拟反应。混合仿真中的试验子结构一般为具有复杂特性的部分,而非线性特性比较简单或者受力情况单一的部分为数值子结构,将其用计算机进行数值模拟。试验子结构和数值子结构之间通过通信软件传输数据[2]。
美国加州大学伯克利分校借助其研发的开源有限元软件OpenSees作为数值模拟软件,开发了接口软件OpenFresco,利用MTS液压控制系统作为试验控制系统,建立混合仿真试验系统,进行了倒V型支撑体系的试验研究[3]。伊利诺斯大学香槟分校在这个试验的基础上,完成了基于网络的分布式混合仿真试验。
1 混合仿真试验外部程序实现
本文借助瑞士W+B公司生产的LFV-L型动态多功能测试设备(图1),该设备可以根据PCS8000控制系统的指令,完成要求的加载并反馈实测数据。试验中采用C++编写的接口通讯软件PMI(PCS8000-MATLAB-Interface)实现计算程序与试验中采用的PCS8000控制系统之间的数据传递与交换(图2)。MATLAB编写的计算程序作为计算软件,用于试验中数值子结构的计算。
1.1 接口通讯软件PMI
PMI是利用Visual C++语言编写而成的,将数值计算程序MATLAB封装成“MATLAB.M”文件,内嵌在PMI里,从而实现MATLAB编写的计算程序数据与PCS8000控制系统之间的数值接受与反馈。PCS8000控制系统的数据输出模块可以采集每一子结构的恢复力,同时将采集到的数据传送到计算机的RS-232串口里,接口通讯软件PMI读取并判断RS-232串口接收到的力值是否符合规定格式“±1234.1234”,符合开始读取该力值并存储。
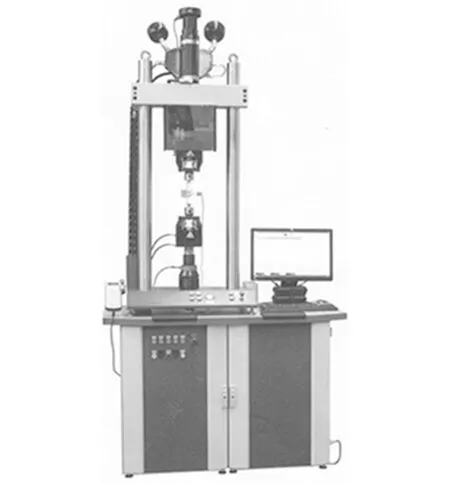
图1 LFV-L型动态多功能测试设备

图2 数据交换过程
PMI是以ASCII为基础而编成的,RS-232串口是在IBM-PC及其兼容机上执行的串行连接标准,是现在主流的串行通信接口之一[4]。一般计算机上会有2组RS-232 接口,分别为COM1和COM2,PMI运行时选择的是COM2接口(图3)。串口通讯在软件中需要设置很多项,串口两端必须要定义相同的波特率、数据位、停止位和奇偶校验等参数,才能实现接口通讯。根据PCS8000的串口通讯参数,将PMI的波特率设置为9 600[5]。试验开始时,PCS8000控制系统与PMI通讯软件同时打开,软件的接收区会自动显示所接收的力值,此时PMI调用由MATLAB计算程序封装而成的“MATLAB.M”文件,计算相应的位移与速度值,同时将速度与位移值转为为规定格式“±1234.1234”,实时地反馈给PCS8000控制系统。LFV-L型动态多功能机按照接受到的速度,运行相应的位移。根据输入的地震波,PMI通讯软件与PCS8000控制系统协同工作,实现试验机的实时与反复地运动,完成带粘弹性阻尼器结构的混合仿真试验。

图3 接口通讯软件PMI界面图
1.2 MATLAB计算程序
采用MATLAB编制计算程序,对4自由度斜拉索分析,Newmark-β法是一种逐步积分的方法,是动力学分析中最常用数值方法之一[6]。Newmark-β法的计算步骤如下:
1)计算结构形成的刚度矩阵[K]、质量矩阵[M]和阻尼矩阵[C];


4)计算有效荷载:


({F}t+Δt为作用外力)
5)加速度与速度:

利用结构动力学Newmark-β法,结合MATLAB计算程序,求出数值子结构的位移与速度,将得到的每一步位移与速度,再通过PMI接口,传递给PCS8000控制系统,让试验机以每一步的速度,运动到相应的位移,同时反馈下一步运动时,粘弹性阻尼器作用在结构上的力,代入计算步骤(4) ,以此反复迭代,模拟带粘弹性阻尼器的斜拉索动力仿真。
2 子结构拟动力实验研究
2.1 力学模型
模型为4自由度斜拉索结构。跨径L=8m,抗弯惯性矩I=8 575×106mm4,弹性模量E=3.25 ×104N/mm2。模型简图如图4,粘弹性阻尼器安装在1号处,将斜拉索结构简化为4自由度分析,将两端固支的斜拉索模型动力等效成两端铰结的斜拉索模型[7]。

图4 斜拉索结构及其简化数值模型
2.2 粘弹性阻尼器及地震波
如前文所示,本次试验部分为粘弹性阻尼器(图5),由2块100 mm×40 mm×4 mm的钢板之间夹着4块40 mm×40 mm×4 mm的橡胶材料层组成。采用人工地震记录的第1条地震波el centro,斜拉索结构在el centro地震波前10 s作用下,其最大加速度峰值为333.2 cm/s2。

图5 粘弹性阻尼器示意图
3 实验结果及结论
实验采用速度与位移控制子结构实验系统,分析了带粘弹性阻尼器的斜拉索动力混合仿真, 通过MATLAB程序纯理论计算与混合仿真实验的数值比较,验证了斜拉索结构混合仿真的可靠性。图6~7分别为仿真实验与MATLAB纯理论计算在1号处的位移响应和速度响应的结果比较,仿真实验1号处最大位移为15.12 mm,而采用MATLAB程序纯理论计算为14.45 mm,二者的最大误差控制在5%之内,充分说明了带粘弹性阻尼器的斜拉索动力混合仿真的精确性。

图6 斜拉索1号处位移响应比较

图7 斜拉索1号处速度响应比较
同时,也反映了PCS8000控制器与PMI通讯传递数据的实时性与可靠性,从侧面反映这套系统的准确性与适用性,为今后其他子结构的研究做下铺垫。
[1] Pinto A V, Pegon P, Magonette G, et al. Pseudo-dynamic testing of bridges using non-linear substructuring[J]. Earthquake Engineering & Structural Dynamics, 2004, 33(11):1125-1146.
[2] 赵鹏飞, 王亚勇, 程绍革. 一种新型的结构抗震试验方法[J]. 工程抗震与加固改造, 2005, 27(6):41-44,59.
[3] Schellenberg A, Kim H K, Takahashi Y, et al. OpenFresco command language manual[M]. Merced: The Regents of the University of California, 2009:5-34.
[4] 孙晓云. 接口与通信技术原理与应用[M]. 北京: 中国电力出版社 2007:10-25.
[5] 串口通信的基本概念[EB/OL]. (2012-09-04). http://www.cnblogs.com/wlei/archive/2012/09/04/2670752.html.
[6] 徐荣桥. 结构分析的有限元法与MATLAB程序设计[M]. 北京: 人民交通出版社, 2006:238-246.
[7] 林元培. 斜拉桥[M]. 北京: 人民交通出版社, 1994: 6-20.
Dynamic Simulation of Cable with Viscoelastic Dampers
CAO Zhi-wei, XU Zhi-hong, ZHANG Qi, DONG Cheng, LI Cheng-sheng
(Nanjing University of Science and Technology, Nanjing 210000, China)
This study provide software to calculate the seismic response of cable structures with viscoelastic dampers using the MATLAB program. At the same time, the interface communication software (PMI) between the PCS8000 controller and the calculation software is developed by using C++ Visual language to establish a bridge between the numerical substructure and the experimental substructure. The comparison between the results of mixed simulation and pure theoretical calculation based on MATLAB program proved that the experimental results are consistent with the pure numerical calculation, through which the reliability of hybrid simulation of cable structure is verified.
stay cable; Matlab; hybrid simulation; interface communication software PMI
2016-07-25
曹志威(1993—),男,江苏淮安人,南京理工大学,主要从事混合仿真方面研究工作.E-mail:524070336@qq.com
P315-391
A
1003-1375(2017)02-0066-04
10.3969/j.issn.1003-1375.2017.02.011
曹志威,徐志洪,张祁,等. 带粘弹性阻尼器的斜拉索动力混合仿真[J].华北地震科学,2017,35(2):66-69.
猜你喜欢
设备管理与维修(2022年21期)2022-12-28
建材发展导向(2022年5期)2022-04-18
湖南理工学院学报(自然科学版)(2022年1期)2022-03-16
数学物理学报(2021年5期)2021-11-19
科技信息·学术版(2021年18期)2021-10-25
工业安全与环保(2020年10期)2020-11-05
应用数学(2020年2期)2020-06-24
西安建筑科技大学学报(自然科学版)(2016年1期)2016-11-08
小型内燃机与车辆技术(2015年4期)2015-10-22
橡胶工业(2015年5期)2015-08-29
