基于无人飞行器的急救系统研究
2017-05-30 10:48乔榕温晓婧马玲靖旭
科技风 2017年6期
关键词:无人机
乔榕 温晓婧 马玲 靖旭

摘 要:本文针对目前国内交通混乱拥堵,救护车在接到急救任务后不能赶在病人的黄金时间内到达现场的普遍问题。主要研究如何构建一个以无人机为载体,医院、救护车、急救中心三方的急救医疗体系结构,来解决目前由于交通堵塞引起救护车迟到以及由于信息共享性差而导致的急救方案不理想的问题。
关键词:无人机;急救成功率;急救系统
医疗是人类社会的基本问题,我国十分重视对公众的院前急救。许多时候,病人的病情危重都是延迟、救护车的迟到等原因造成的。以无人机为载体搭载完备急救装置的应用对急需救治的人来说是一个很大的转机,可以大大提高患者的急救成功率。通过研究无人机在医疗方面的应用,设计出一个完善的急救医疗系统,将医院、急救中心和救护车三者结合起来,最终实现病人的数据共享或实现实时监测救护车的位置与动态,同时通过智能化的救护车远程控制急救装置,使得现场的施救人员在紧急的情况下,准确得到病人所需的药品,并且对病人的生理特征进行检测并反馈,从而使救护车内的医护人员做到心里有数,制定相应的治疗方案,准备要采取的治疗措施,提高医院的工作效率,从而使整个急救过程更加体系化、智能化、人性化,使其更好地服务于现代化社会。
1 研究背景
2014年底,荷兰一名大学生率先研制出了一款急救无人机,它的速度可达到每小时96公里,由6个螺旋桨驱动,可携带4公斤负载。研制者表示:“欧盟每年有大约80万人心脏骤停,只有8%的人幸存。造成如此低的存活率的主要原因在于应急部门需要大约10分钟的响应时间,而心脏骤停后大约4到6分钟便会导致脑死亡和最终的死亡。这种救护无人机能够在1分钟内将除颤器送到周边12平方公里内的患者身边,将存活率从8%提高到80%。”
2015年,谷歌就以无人机携带救生设备出急诊的理念申请了专利。投资者按下特定的紧急状况按键,携带相应急救设备的无人机就会迅速飞来。专利解释说,呼叫设备可以通过wifi、网线,以及借助手机和谷歌的无人机队取得联系。
随着国内外医疗体系的发展,公众的院前急救得到极度重视。以无人机为載体搭载完备急救装置的应用将在很大程度上提高院前急救成功率。而至今已出现的基于无人机的医疗系统存在功能单一、没有生理数据采集、与医护人员缺乏沟通联系等不足和缺陷。在智慧城市的大背景下,已有的先进通信技术将与医疗体系相融合,带给基于飞行机器人的急救系统新的发展。
2 研究目的
此次本项目主要为达到以下研究目的:
1)使用无人机搭载急救装置的方式,利用无人机的机动性,缩短其到达抢救现场的时间,弥补救护车因道路堵塞而不能及时到达现场的缺点,有效降低病人因抢救不及时而死亡的概率,并在无人机上配备摄像头,将现场情况实时反映到医院,大大提高患者的存活率;
2)设计功能相对齐全的急救装置,内部包括相应的急救设备、检测设备与急救药品,使救护人员可以针对病人不同的病情选择措施与药物;
3)通过基于ARM的微型电脑主板,救护车远程控制机载急救小舱室的打开,使现场的施救人员可以准确拿取药品与设备,从而及时进行施救,稳定病人病情;
4)将所测得的病人的生理指标通过4G技术传回到救护车内的yeelink云平台,使医护人员能够对病人的状况初步了解,从而准备相应的措施;
5)建立医院、急救中心与救护车之间的急救系统:将病人的病史(若有的情况下)从医院调到救护车内作为治疗参考,并可以与医院通过专用通信软件实现实时语音及视频聊天;急救中心调度系统可以实时监测救护车的位置与状态。
3 研究原理
1)结合本项目的需求,设计急救装置上的控制板大小、功能、及通信模块,选定需要测量的患者的生理参数与合适的传感器,比如心率、血氧、体温、心电图传感器,并将其与控制板的通信模块相结合,使其能够实现数据的实时采集、发送和信号的接收等功能;
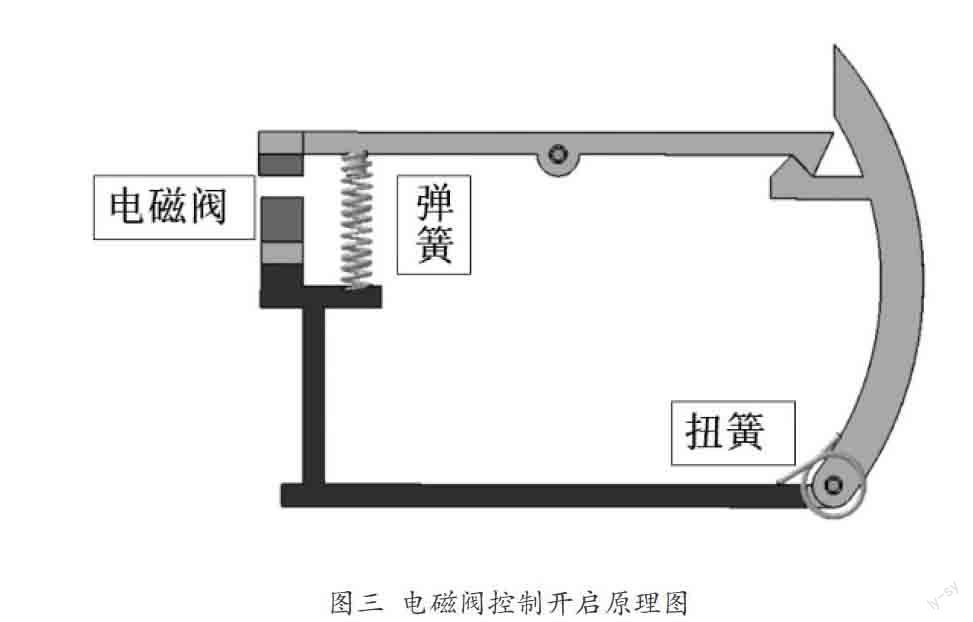
2)设计机载急救装置,尤其是机械受控部分,分析目前机械控制的方式,比较得出一种最佳方式,不仅使其救护功能较为完备,还能够使救护车通过远程控制的电信号推动急救每一小舱室的打开;
3)选择目前比较时兴智能家居控制系统中的远程控制工具—基于ARM的微型电脑主板(树莓派),来实现救护车对无人机上急救装置的远程控制。基于ARM的微型电脑主板摆脱了控制距离的限制,使数据可以超长距离、准确无误的传输。
在深入分析基于ARM的微型电脑主板的分类,功能、及特性的基础上,研究目前各种版本的基于ARM的微型电脑主板的系统功能、编程语言、使用特性与限制,选定符合项目要求的基于ARM的微型电脑主板类型与编程语言;
4)通过分析目前现有的资料,结合国内外智能化救护车发展现状,开发一款全新的救护车上的专用软件,使其不仅能够实现与医院的实时语音、视频交流,并且能够调回医院数据库中病人病史,便于医护人员制定最佳治疗方案;
5)研究目前较远距离通信技术,深入分析当前通信技术的优缺点,比较采用哪种技术更加安全可靠,更符合本项目的研究需求与未来几年国内外的发展趋势,确保医院与救护车之间的语音及视频交流的实时性与数据传输的及时性。
4 总体构想图
如图一所示,多旋翼无人机的体系结构设计总体分为四个方面:无人机上急救装置的结构设计、救护车对机载急救装置的控制、现场施救人员与救护车内部医护人员的实时交流以及救护车与医院之间的通信。
5 各部分设计效果图
5.1 急救装置设计效果图
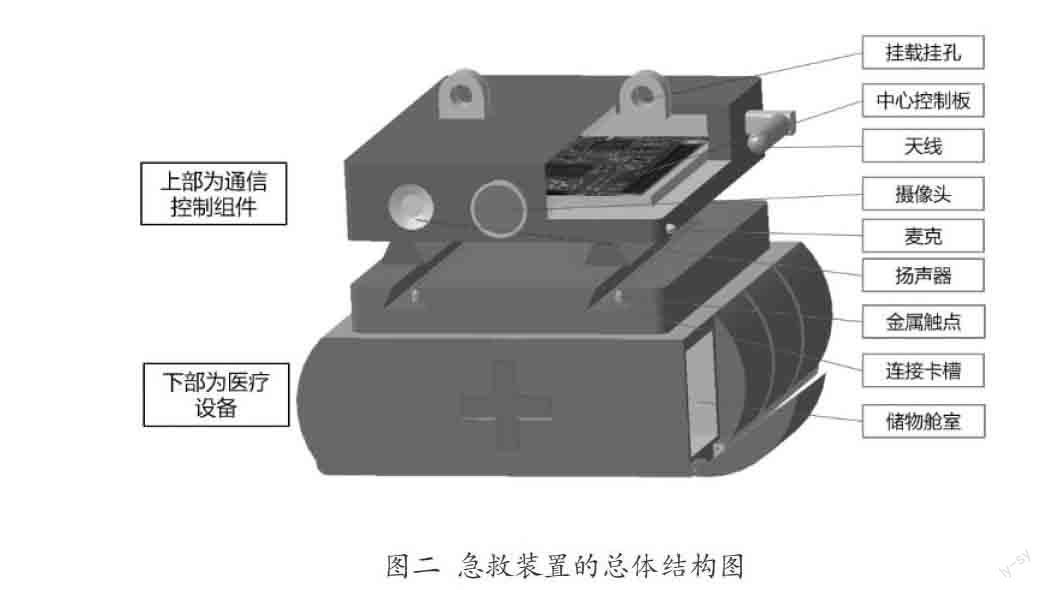
急救装置总体可分为两部分,分别是上部的通信控制组件和下部的医疗设备。
5.1.1上部通信控制部件
上部为控制模块,其内部包括核心处理单元(基于ARM的微型电脑主板),二级控制板,无线通信模块,供电电源,麦克,扬声器,摄像头,通过上部的挂载孔挂载至飞行器底板上。
上部的主要功能是与急救车进行通信,将从检测设备上以及摄像头和麦克风收集到的信息发送至救护车上,并能够接受救护车上发出的指令。摄像头能够将现场的实时画面拍摄下来,病人家属通过麦克风与扬声器实现和医生实时的语音交流。上部的控制信号通过电磁继电器和下部的控制开关相连接。
5.1.2下部医疗设备
下部由电磁阀控制的舱室,左右各有若干个装载舱室,其中左侧为检测设备的装载舱室,右侧为急救药品的装载舱室,两部分通过卡槽实现机械连接,在卡插上设有金属触点,能够实现两部分的信号传送以及充电的功能。
急救装置的设计考虑到抢救现场的实际情况,配备有医疗设备,药物等救护所需物,并设计有天线等通信模块与救护车实现实时通话。该装置使得整个抢救过程更加人性化、智能化。
5.2 救护车对机载急救装置的控制
5.2.1对急救装置的控制
该部分使用基于ARM的微型电脑主板,通过python语言编程及onenet云平台操作来实现对继电器的开闭。
5.2.2急救装置与救护车的数据传输
该部分基于ARM的微型电脑主板通过4G网络连接到onenet云服务平台,传感器通过zigbee技术传送到树莓派上,在树莓派内用python编程,从而实现上传数据。救护车内的笔记本电脑即可看到相关数据。
5.3 施救人员与救护车内医护人员的实时交流设计
当飞机着陆之后,救护车上的计算机已安装VLC播放器,通过yeelink平台发出指令,从而摄像头、扬声器及麦克风等设备打开,通过4G网络连接来实现与救护现场的实时语音及视频传输。
该功能的实现将专业医护人员与现场的病人家属联系起来,可以实时指导病人家属进行一些简单但必要的急救措施,为病人争取黄金的急救时间。除此之外,医护人员可以掌握病人的实时状况,从而制定到达现场后的急救方案。
5.4 救护车与医院的实时通信设计
在VB的环境下,编写医院与救护车的专用通信软件,进行实时通信与数据共享。
5.4.1通信程序设计
该软件的模式为客户机/服务器(C/S)模式,即客户端向服务器发送连接请求,服务器对请求进行响应,从而建立起数据传输通道;之后客户端与服务器之间便可以进行简单的语音及视频交流。
5.4.2服务器设计
创建一个“标准EXE”工程,选中winsock控件,将其属性设置为0,即ckTCPProtocol协议。读取服务器的IP地址,當接收到来自客户端的请求时,服务器由侦听状态转换为接收状态。
5.4.3客户端设计
同样创建一个“标准EXE”工程,将其属性设置为0。读取本机的IP地址,当收到来自服务器的接收请求时,便可发送相应信息;当服务器传回消息时,利用winsock控件中的GatData来接收数据。
利用专用通信软件,在病人未到达医院之前,救护车上的医护人员可以了解病人病史,采取准确的急救措施,并可以和医院的专家共同进行商讨,及时制定病人的救治方案,并安排专业医护人员做好手术准备。这样更加完善了医疗急救系统,有利于全方位打造未来智慧化城市,使人类的医疗更有保障。
6 创新点
1)利用无人机灵活,机动性高的特点,有效缓解救护车发生交通堵塞而延误最佳救治时间的状况,第一时间到达抢救现场,将医疗设备与急救药物送给患者。
2)通过基于ARM的微型电脑主板,救护车对急救装置的指令控制,急救装置与救护车的数据传输,以及摄像头与救护车的视频通信,实现救护车的远程控制,指导患者家属进行必要的急救与生理检测,并将测得的生理参数传回,便于实时了解病人状况,提前掌握病人的第一手资料。
3)通过4G通信技术,建立一个以无人机为载体,救护车、急救中心、医院三方的医疗救护系统,急救中心可以调度救护车,救护车可以远程控制无人机并接收无人机上急救装置传回的实时数据与图像,医院可以将患者的病史传给救护车上的医护人员,便于他们更加全面了解患者,更加准确地诊断病情,采取相应的急救措施。
7 可行性分析及使用价值
本项目针对急救系统120救护车的不能及时到达而错过救治时机问题,提出基于飞行机器人(无人机)与公共医疗数据共享系统技术的急救系统方案,并研制开发其中的关键技术和单元技术,项目具有广泛的应用前景和社会效益,是未来医疗急救系统的发展趋势。设计项目从关键技术、系统结构、单元技术和应用验证等方面进行了详细的论证,并给出了可行的研究开发方案。
参考文献:
[1] S. K. Bhoi1, P. M. Khilar1, VehiHealth: An Emergency Routing Protocol for Vehicular Ad Hoc Network to Support HealthcareSystem,JOURNAL OF MEDICAL SYSTEMS,40(3),2016.
[2] Jin-Ho Park*,Hong-Sik Yang*,Jae-Hyeok Lee*,Hoon-Jae Lee*,Tae-Yong Kim*,Remote Power Control System using the Raspberry Pi,The International Journal of Advanced Smart Convergence 4(2):120-123,2015.
[3] El-Masri Samir, Saddik Basema, Proposal of an End-to-End Emergency Medical,System,Studies in health technology and informatics,Vol.169, pp.349-53,2011
[4] Devi,MK(Devi, Kiruthiga M.),Balakrishnan,R(Balakrishnan,Ranjith),Automated Fetal Monitoring System,Procedia Engineering,38:861-866,2012.
[5] Yuehong YIN,The internet of things in healthcare: An overview, Journal of Industrial Information Integration, In Press,Uncorrected Proof,Available online 4 March 2016.
[6] 王增,罗博文.李欣宁,葛泉波.基于智能物联网的医疗救护车系统设计,控制系统设计(2014年06期)
[7] 宋斌,施永周,董德胜,王丹,周文婷,廖金平.基于无线网络的区域急救系统的设计,中国医疗设备,2015年第30卷02期.
[8] 李龙棋,方美发,唐晓腾.树莓派平台下的实时监控系统开发.闽江学院学报,2014年第 5 期.
[9] 林一平.救死扶伤的救护无人机.航空航天,2015年03期.
猜你喜欢
电脑知识与技术(2016年28期)2016-12-21
新教育时代·教师版(2016年27期)2016-12-06
农机使用与维修(2016年10期)2016-11-10
人间(2016年26期)2016-11-03
科技视界(2016年22期)2016-10-18
企业导报(2016年9期)2016-05-26