
胶囊内窥镜磁跟踪系统体内装置的能量管理
2017-05-25 00:37秦锐华郭旭东许堂成
上海理工大学学报 2017年2期
秦锐华, 郭旭东, 翟 刚, 许堂成
(上海理工大学 医疗器械与食品学院,上海 200093)
胶囊内窥镜磁跟踪系统体内装置的能量管理
秦锐华, 郭旭东, 翟 刚, 许堂成
(上海理工大学 医疗器械与食品学院,上海 200093)
为了解决磁跟踪系统体内装置的能量供应问题,研究了一种低功耗、高效、智能化的能量管理方法.主要包括主控制器、升压电路、非接触式开关、电源路由器和负电荷泵.随着纽扣电池电量的消耗,升压电路由主控制器智能化选通,当电池电压大于3.3 V时关断,小于或等于3.3 V时开启,由此减小了升压芯片在前期的能量损耗.另外,主控制器进一步控制电源路由器,根据体内装置的工作状态,按照需要选通后级电路.经实验验证,能量管理模块可延长纽扣电池的工作时间,最大程度地降低了无效能量损耗,满足磁跟踪系统完成消化道检查所需的时间要求.
磁跟踪系统; 能量管理模块; 主控制器; 升压电路
随着人们生活方式的改变,消化道疾病的发病率逐年升高,目前最常规的检查方法是内窥镜检查.传统的内窥镜检查采用缆线式结构,属于有创检查,并且检查存在盲区,容易造成交叉感染.胶囊内窥镜[1]可由吞咽方式进入人体消化道,在胃肠道疾病临床诊断上取得了很大的进展.但是,胶囊内窥镜进入胃肠道后,获取的胃肠道图像无法与具体部位对应,也无法为后续进一步治疗提供方位参数,所以,需要开发胶囊内窥镜跟踪系统.胶囊内窥镜跟踪系统包含体内装置和体外装置,为了确保跟踪系统的体内装置长时间稳定可靠地工作,节能和供电成为主要的讨论焦点.
目前主要有两种供电方式:内置电池、无线供能系统.较之于无线供能方式[2],内置电池电路设计简单.但是,为了便于吞服,且受胶囊内窥镜尺寸限制,只能采用体积较小的纽扣电池进行供电.纽扣电池容量有限,不能在大电流下长时间的工作[3],当电量不足时,跟踪系统的体内装置可能会出现较大的数据偏差,从而导致跟踪失效.为了完成胶囊内窥镜对整个消化道的检查,除了节能,即低功耗设计外,还要对有限的容量进行管理[4].本文设计了一种基于胶囊内窥镜磁跟踪系统[5-6]的能量智能管理模块,从而保证纽扣电池可以提供长时间稳定的能量,最大限度地延长电池的有效使用时间[7].
1 磁跟踪系统的总体设计
胶囊内窥镜磁跟踪系统主要由体外和体内两部分组成.体外包括交变磁场发生装置、数据接收与便携式存储装置、PC机数据分析装置.体内包括主控制器、螺旋线圈、信号处理模块、射频芯片、电源模块.系统总体结构如图1所示,其工作原理是根据麦克斯韦电磁场理论,体外的磁场发生装置按照初始值,由主控制器产生固定频率的方波,经过高阶低通滤波器和功率放大电路得到电流较大的正弦波,从而驱动励磁线圈阵列产生较强的磁场信号.为了保证胶囊内部的感应线圈在人体内以任意角度都可以接收到体外的磁场信号,设计了时序控制电路.体内的螺旋线圈通过电磁感应接收体外的磁场信号并将其转化为电信号[8],然后对信号进行滤波和放大等信号处理后传输到主控器中,通过主控制器自带的ADC(模数转换器)模块将模拟信号转换成数字信号,此数字信号是一系列电压值.最后经射频芯片将数字信号发送至体外的便携式存储装置内[9],便携式存储装置包括数据接收装置和存储模块,其中,无线数据接收装置接收由体内发送的数据,最后将数据储存在存储装置的SD卡(安全数码存储卡)中.检查结束后将存储装置的SD卡中的电压数据导入到PC机中,根据电压值并结合相应的算法反求出胶囊的方位信息.

图1 磁跟踪系统框图
2 智能化能量管理模块的设计
由于内置的纽扣电池始终受制于存储的容量,为了完成胶囊内窥镜在整个消化道内的跟踪定位,设计了智能化能量管理模块,电源管理模块结构图如图2所示.智能化能量管理模块主要有两个功能,一是电池电压优先与电池容量优先的选择;二是控制后续电路的间歇性工作.考虑的问题包括电池尺寸选择和电池个数以及级联方式的设计、非接触式开关的设计、主控制器的控制流程设计、电池电压优先与电池容量优先的设计、省电关断模式的设计、负电荷泵的选型.
采用3节氧化银纽扣电池串联的方式进行供电,将主控制器自带的ADC模块采集到的电池电压与设定的阈值电压进行比较,从而判定是否启动升压模块.具体就是当电池电压V大于3.3 V时,以电池电压优先方式进行供电,通过线路1给主控制器和电源路由器供电;当电池电压小于或等于3.3 V时,以电池容量优先方式进行供电,通过线路2经过升压电路将电压升至3.3 V,再对后续电路进行供电.另外,由于信号处理电路和无线发送电路的能量损耗比较大,利用主控制器作为整个系统的控制中枢,当信号处理和无线数据发送时,主控制器工作在正常状态;当主控制器处于休眠状态时,停止对后续电路的供能.为了实现间歇性工作,本文设计了电源路由器,相当于一个电子开关[10],控制信号处理电路和无线发送电路的关断或闭合.

图2 电源管理模块结构图
3 关键技术设计
3.1 非接触式开关
体内装置在吞咽之前应处于断电状态,但是,传统的接触式开关无法实现根据实际需要关断或闭合,所以,本文根据干簧管的原理,设计了非接触式开关控制其关断.非接触式开关内部由2个弹性磁簧片组成,密封于充满惰性气体的玻璃管中;当外部有磁场作用时,2个簧片被磁化从而相互吸引,使触点接触;当外磁场移开时,2个簧片由于本身的弹性而弹开,从而使触点断开,图3为非接触式开关的电路符号.本文选用美国COTO干簧管RI-80,尺寸为1.8 mm×5 mm,可以满足磁跟踪系统小封装的需求.
3.2 升压电路与负电荷泵设计
由智能化能量管理模块的原理可知,当主控制器采集的电压大于3.3 V时,升压电路处于断开状态,有效地降低了能量的损耗;当电压小于或等于3.3 V时,升压电路开启,将电压升至3.3 V后再对后续电路进行供电.为了实现升压功能,本文采用了易于设计和低成本的超低操作电流的稳压3.3 V的直流/直流(DC/DC)控制器TPS60210,外部只需要4个电容即可实现其功能,其原理如图4所示.C111,C112,C113,C114为电容,R111为电阻,U11为电压.

图3 非接触式开关电路符号
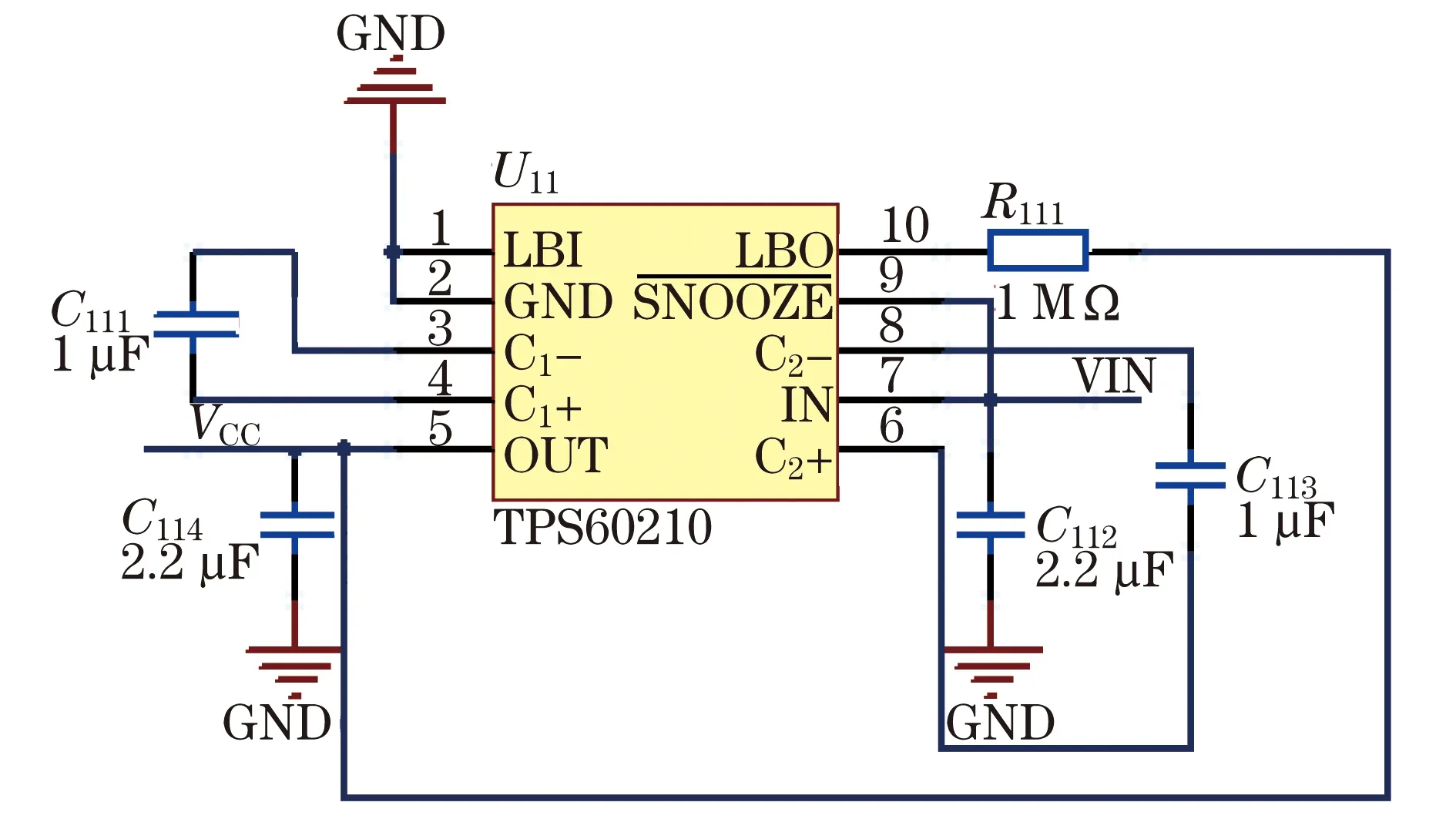
图4 升压电路
采用螺旋线圈感应体外磁场发生装置产生的磁场信号,根据法拉第电磁感应定律可知其产生的感应电动势会出现负极性,信号处理电路中的运放采用双极性电源供电,为了产生磁跟踪系统所需的负电源,本文设计了负电荷泵.采用MAX660电荷泵电压转换器来产生负电源电压,MAX660具有低工作电压、低电压损耗和高效率,封装方式为SOIC-8,体积为6.2 mm×5 mm×1.75 mm.它可以将输入的正电压转换成负电压,还可以将输入的负电压转换成正电压,而且可以产生2倍电压.采用MAX660设计的电路简单,外部只需要2个电容即可实现将输入范围为1.5~5.0 V的电压转换为反向电压输出,其电路原理图如下页图5所示.
3.3 能量智能管理的控制流程设计
主控制器作为智能化能量管理模块的控制中枢,要实现对电池电压的实时采集并与基准电压比较、升压电路的选通与关断、电源路由器的关断与闭合等功能.为了实现这些功能,选用8位机PIC16F767,该设备由Microchip公司生产,具有低功耗、低电压、高速度等特性;选择QFN-28的封装方式,体积为6 mm×6 mm×1 mm.低功耗主要体现在:在主运行工作模式下,工作电压为2 V时,工作电流为76 μA;在休眠模式下,需要的工作电流仅有0.1 μA.智能化能量管理的控制流程如图6所示.
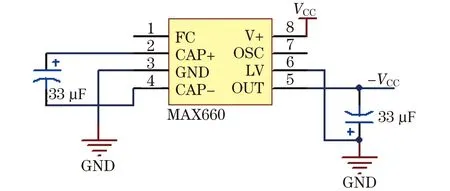
图5 负电压转换电路
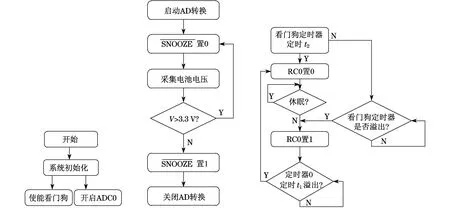
图6 智能化能量管理的控制流程图

主控制器的WDT时钟来源于31.25 kHz的内部振荡器,其溢出值可扩展到268 s.选用主控制器的RC0端口来控制电源路由器,将RC0端口与电源路由器的控制引脚相连,首先将RC0置0,主控制器进入休眠状态,等待看门狗定时器的溢出,此时模拟开关处于断开状态,关闭信号处理和无线发送电路的电源.当看门狗定时器溢出时,将会唤醒主控制器,唤醒后将RC0端口置1,此时模拟开关闭合,接通信号处理和无线发送电路的电源,整个磁跟踪系统处于正常工作状态.然后利用定时器控制RC0的关断,定时t1,从而控制整个磁跟踪系统的正常工作时间.如此反复进行,可以实现主控制器正常工作t1后进入休眠,休眠时间为t2,进而达到利用软件延长胶囊工作时间的目的.
4 实验测试与验证
4.1 纽扣电池工作特性测试
采用maxell的SR936SW纽扣电池进行供电,标称容量为71 mA·h,尺寸为9.5 mm×3.6 mm,质量为1.1 g.首先通过实验验证maxell的SR936SW、Sony的SR936、VSai的LR936和天球的LR936这4种电池的放电时长,它们的尺寸均为9.5 mm×3.6 mm,实验测试时采用100 Ω的外接阻抗,其放电时长如表1所示.

表1 纽扣电池放电时长
经过实验验证,证明了氧化银纽扣电池的放电特性和放电时长要好于碱性纽扣电池的,因此,在设计中采用了氧化银纽扣电池.为了保证磁跟踪系统完成整个消化道的检查,必须延长电池的工作时间,由此设计了智能电源管理模块.管理模块的一个功能是控制后续电路的间歇性工作,间歇性工作时休眠状态所需的工作电流比较小.所以,可以降低放电过程中电极的极化,减小电化学内阻,延长胶囊在人体内的工作时间.
4.2 升压芯片效率测试
升压芯片TPS60210的效率
式中:Vout为输出电压;Vin为输入电压;Iout为输出电流;Iin为输入电流.
测试结果如表2所示,可知整个磁跟踪系统装置的电流约为28.5 mA,TPS60210的效率与电压的大小成反比关系,其电压越小,效率越高,TPS60210的效率与理论值基本相同.

表2 TPS0210效率表
由于升压芯片的效率小于1,所以,在电源管理模块中设计了两路工作方式.当电池电压大于3.3 V时,采取电池电压优先供电方式,即直接对电路进行供电,避免升压芯片的能量消耗;当电池电压小于或等于3.3 V时,采取电池容量优先供电方式,即通过升压芯片将电压升至3.3 V时再对电路进行供电,可以最大化利用能源,避免能量的浪费.
4.3 能量管理模块测试
为了验证能量管理模块的工作时间,制作了跟踪系统体内装置的样机,并进行了实验.样机各模块如图7所示,每个模块的直径为10 mm,样机总长度为20 mm.
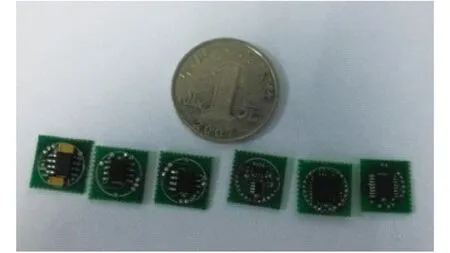
图7 磁跟踪系统体内装置各模块
使用3节氧化银纽扣电池供电,分别测试了直接供电、一直通过升压电路供电和采用智能化能量管理模块供电这3种方式的平均工作时间T,如图8(a)所示.另外,测试了采用智能化能量管理模块供电、正常工作时间均为1 s时不同休眠时间的平均工作时间,如图8(b)所示.

图8 不同供电方式和同一供电方式不同休眠时间的平均工作时间
通过对比可以看出,一直采用升压电路供电方式的工作时间最短,因为,升压芯片的效率小于1.所以,即当电压小于3.3 V时,虽然系统仍工作一段时间,但是,整体的工作时间没有直接供电的时间长.智能化能量管理模块的工作时间最长,当电池电压大于3.3 V时,采取直接供电方式,此时工作了3.91 h;当电池电压小于或等于3.3 V时,采用升压电路将电压升至3.3 V,再对系统进行供电,仍可以工作1.83 h.另外,当采用智能化能量管理模块供电时,休眠时间越长,工作时间越长,因为,休眠时所需的工作电流较小,耗能低.
5 结 论
设计了基于胶囊内窥镜磁跟踪系统体内装置能量管理模块,并对磁跟踪系统的样机进行了实验测试.测试数据表明,能量管理模块可以满足磁跟踪系统完成在人体内工作所需的时间要求.下一步需要对样机进行优化,使其体积更小,满足临床试验的需求.
[1] CIUTI G,MENCIASSI A,DARIO P.Capsule endoscopy:from current achievements to open challenges[J].IEEE Reviews in Biomedical Engineering,2011,4:59-72.
[2] 于政池.胶囊内窥镜无线供能模块设计与分析[J].工程技术,2016,48(5):238-239.[3] STUART T A,ZHU W.Modularized battery management for large lithium ion cells[J].Journal of Power Sources,2011,196(1):458-464.
[4] FENG L,MAO Y,CHENG YH.An efficient and stable power management circuit with high outputenergy for wireless powering capsule endoscopy[C]∥Proceedings of 2011 IEEE Asian Solid State Circuits Conference.2011:229-232.
[5] GUO X D,RUAN C,GE B,et al.Magnetic generator with automatic gain regulation in a wireless tracking system for a capsule endoscope[J].Applied Mechanics and Materials,2013(401/402/403):1393-1396.
[6] 郭旭东,翟刚,葛斌,等.胶囊内窥镜倾角传感式磁跟踪系统的设计[J].传感技术学报,2014,27(6):715-719.
[7] 周丁华,姜汉钧,王月娟,等.一款胶囊内窥镜电源管理单元的设计与实现[J].现代仪器与医疗,2016,22(1):10-12.[8] VERMEEREN G,TANGHE E,THIELENS A,et al.In-to-out body path loss for wireless radio frequency capsule endoscopy in a human body[C]∥Proceedings of 2016 IEEE the 38th Annual International Conference of the Engineering in Medicine and Biology Society.2016:3048-3051.
[9] 翟刚,郭旭东,鲁正平.胶囊内窥镜磁跟踪系统体外数据接收便携式存储装置设计[J].生物医学工程学进展,2015,36(2):69-72.
[10] 魏军.模拟开关测试方法探讨[J].电子与封装,2015,15(10):8-11.
(编辑:石 瑛)
Energy Management in an In-Vivo Device of Magnetic Tracking System for Capsule Endoscope
QIN Ruihua, GUO Xudong, ZHAI Gang, XU Tangcheng
(SchoolofMedicalInstrumentandFoodEngineering,UniversityofShanghaiforScienceandTechnology,Shanghai200093,China)
In order to ensure the energy supply of an in-vivo device of the magnetic tracking system for capsule endoscopy,a kind of low power consumption and high efficiency intelligent power management module was proposed.The management module includes the main controller,boost circuit,non-contact switches,router,and negative charge pump power supply.The boost circuit is gated intelligently to the main controller along with the button battery power.The circuit will turn “off” when the battery voltage is greater than 3.3 V,and it will turn“on” while the battery voltage is less than or equal to 3.3 V,which can save the energy of boost chip and resist the early loss.In addition,the master controller controls the power router according to the working state of the device in the body and the need to gate the subsequent circuit.The experiments prove that the use of the energy management module can extend the working hours of the button battery,minimize the energy loss,and meet the time requirement of the magnetic tracking system for capsule endoscopy to complete the entire digestive tracking examination.
magnetictrackingsystem;energymanagementmodule;mastercontroller;boostcircuit
1007-6735(2017)02-0137-06
10.13255/j.cnki.jusst.2017.02.007
2016-11-02
国家自然科学基金资助项目(61001164);上海市自然科学基金资助项目(15ZR1428200)
秦锐华(1988-),女,硕士研究生.研究方向:智能医疗器械.E-mail:344714596@qq.com
郭旭东(1980-),女,副教授.研究方向:精密医疗器械.E-mail:gxd_aaa@163.com
TP 272
A
猜你喜欢
现代仪器与医疗(2022年1期)2022-04-19
现代仪器与医疗(2021年6期)2022-01-18
现代仪器与医疗(2021年4期)2021-11-05
现代装饰(2021年2期)2021-07-21
中国卫生标准管理(2015年3期)2015-01-27
筑路机械与施工机械化(2014年4期)2014-03-01
自动化博览(2014年9期)2014-02-28
自动化博览(2014年4期)2014-02-28
电子设计工程(2014年17期)2014-02-27
