多波束系统在智能水下机器人中的应用展望
2017-05-25 00:37孙玉山李优仁盛明伟庞永杰张国成
中国海洋平台 2017年2期
孙玉山, 李优仁, 盛明伟, 庞永杰, 张国成
(哈尔滨工程大学 a.水下机器人技术重点实验室, b.船舶工程学院, 哈尔滨 150001)
多波束系统在智能水下机器人中的应用展望
孙玉山a,b, 李优仁a,b, 盛明伟a,b, 庞永杰a,b, 张国成a,b
(哈尔滨工程大学 a.水下机器人技术重点实验室, b.船舶工程学院, 哈尔滨 150001)
在进行深海地形探测方面传统的船载多波束存在精度低、成本高、效率低等问题,不能完全满足深海探测需求。采用智能水下机器人(Autonomous Underwater Vehicle, AUV)进行深海探测和考察,已成为重要的发展趋势。分析传统船载多波束系统工作的弊端,结合AUV的特点阐述其搭载多波束系统进行深海探测的优势,介绍国内外应用现状,提出我国多波束系统在AUV应用中可能遇到的问题及展望。
智能水下机器人;多波束;应用展望
0 引言
多波束系统不同于单波束测深系统,它实现了从“点”“线”水下地形测量到条带式、全覆盖、“面”测量的变革,保证了较宽的扫幅和较高的测点密度,因而多波束测深具有全覆盖、高精度、高密度和高效率的特点。多波束探测系统已经广泛应用于海洋矿产、考古调查研究、事故调查和勘探[1-3]等多个领域。不同载体深水多波束系统如图1所示。

图1 不同载体深水多波束系统探测示意图
国际航道组织(IHO)在1994年制定的国际水深测量标准中明确规定:在高级别的水深测量中必须使用多波束全覆盖测深系统。传统的船载多波束系统等方式成本高、精度低、效率低。所以,采用智能水下机器人(Autonomous Underwater Vehicle, AUV)系统进行深海探测和考察,已经成为海洋探测工作的重要发展趋势。
1 AUV搭载多波束系统的优势
传统多波束系统的工作方式是通过水面船搭载多波束系统、水面船携带深水拖曳系统(拖鱼)或是采用动力定位母船的遥控式水下机器人(Remotely Operated Vehicle, ROV)系统。在探测过程中人为控制航行探测路线,实时控制多波束系统、监测探测数据情况,有时还需要对同一地区进行反复精细探测。船载和拖拽式多波束系统如图2所示。

图2 船载(左)和拖拽式(右)多波束系统
传统的船载多波束进行探测的方式对于浅水地区探测比较适用,但是在对深水远海地区进行探测时,这种传统的探测方式会出现较多弊端:(1) 对于远海地区的探测成本高,需要探测人员全程监测。(2) 对于深海地区的探测,船载多波束系统需要设置低频率进行远距离探测,但是这样会降低探测结果的精度,海底地形地貌效果不佳。此外,深远海域海况一般比较复杂,对于探测人员的安全不利。(3) 在进行深海探测时,为了保证探测精度,使用钢缆进行拖拽多波束系统,使其可以在较高频率工作状态下对海底进行探测,此时为了使探测地形完整,水面船的航行路线更加复杂,这样会极大降低探测效率。(4) 船载多波束系统工作时,可能出现载体的姿态变化频繁且幅度较大的情况,对探测工作造成较大影响。
AUV可以以稳定的速度、精准的高度控制和极小的姿态变化采集海底地形信息,与一般船载或者拖鱼探测相比,AUV可获得更加精准的海底地形地貌,并且由AUV搭载多波束系统可对更深的海底地形进行更高精度的探测[4]。AUV搭载多波束系统进行探测任务主要有三方面的优点:
(1) 成本低。传统的船载多波束系统对搭载系统的试验船要求较高,而采用具有动力定位母船的ROV系统,不仅母船的使用成本较高,而且由于系缆的存在,ROV进行探测工作时行动缓慢,探测效率降低,从而导致总成本上升[5]。
水面船拖曳的深拖系统,在水深不足800 m时,通过拖船上的声学设备对拖鱼进行定位;在超过800 m的水域,通常布置长基线阵列对拖鱼进行定位。长基线虽然精度高,但是成本高、耗时长,涉及在海底布放声学位置应答器信标环网(基阵),在初始阶段为确保其可用性,需要冗长的校准过程。因此,为了提高探测精度,采用水面船拖曳的深拖系统往往需要两艘船舶,一艘作为拖船,一艘作为航行在拖鱼上方的定位船舶。深拖系统如图3所示。
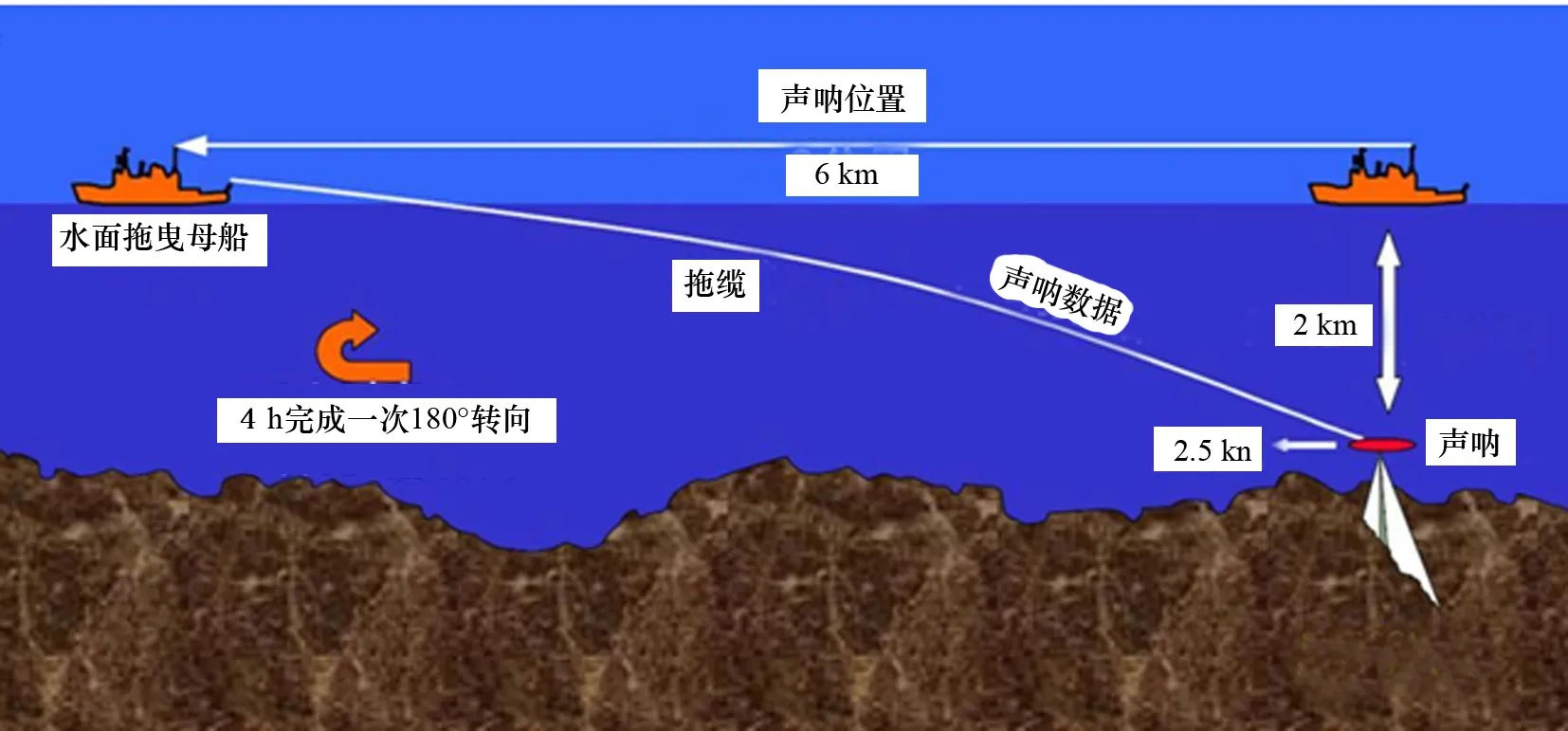
图3 深拖系统工作示意图
(2) 精度高。一般的海底考察采用水面船拖曳的深拖系统,其拖缆底端的拖鱼要保持在距海底十几米的高度上航行,拖缆的长度一般应为深度的3倍。对于1 000~2 000 m的水深,其拖缆长3 000~6 000 m。在这样长的拖缆下,拖鱼容易受海流影响偏离预定航线。偏移距离甚至可达上百米,很难达到预期探测目标。当海底起伏不平时,水面船拖曳的深拖系统也很难保证拖鱼距海底的指定高度。如果高度增加,数据质量不佳;如果高度减少,将限制其探测的交叉覆盖率,并增加与海底碰撞的危险。
因此,采用水面船拖曳的深拖系统很难获得设定航线上高精度的海底数据信息,而AUV却能够以稳定的速度、精准的高度控制和极小的姿态变化进行海底地形探测工作,获得高质量的海底数据信息[6-7],如图4所示。此外,与船载多波束系统相比,AUV在深海地区可以探测到更高分辨率的多波束数据。例如,在2 000 m水深时,测深仪垂直噪声可从7.0 m改善到0.2 m。类似地,多波束声呐的反向散射校准可以从40 m的像素大小改善到小于1.0 m。AUV保持航线和高度控制的优势如图5所示。
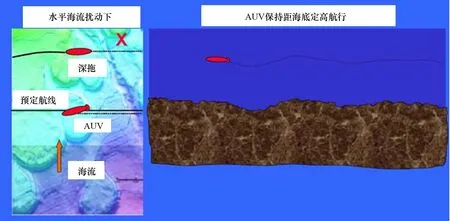
图4 AUV保持航线和高度控制的优势
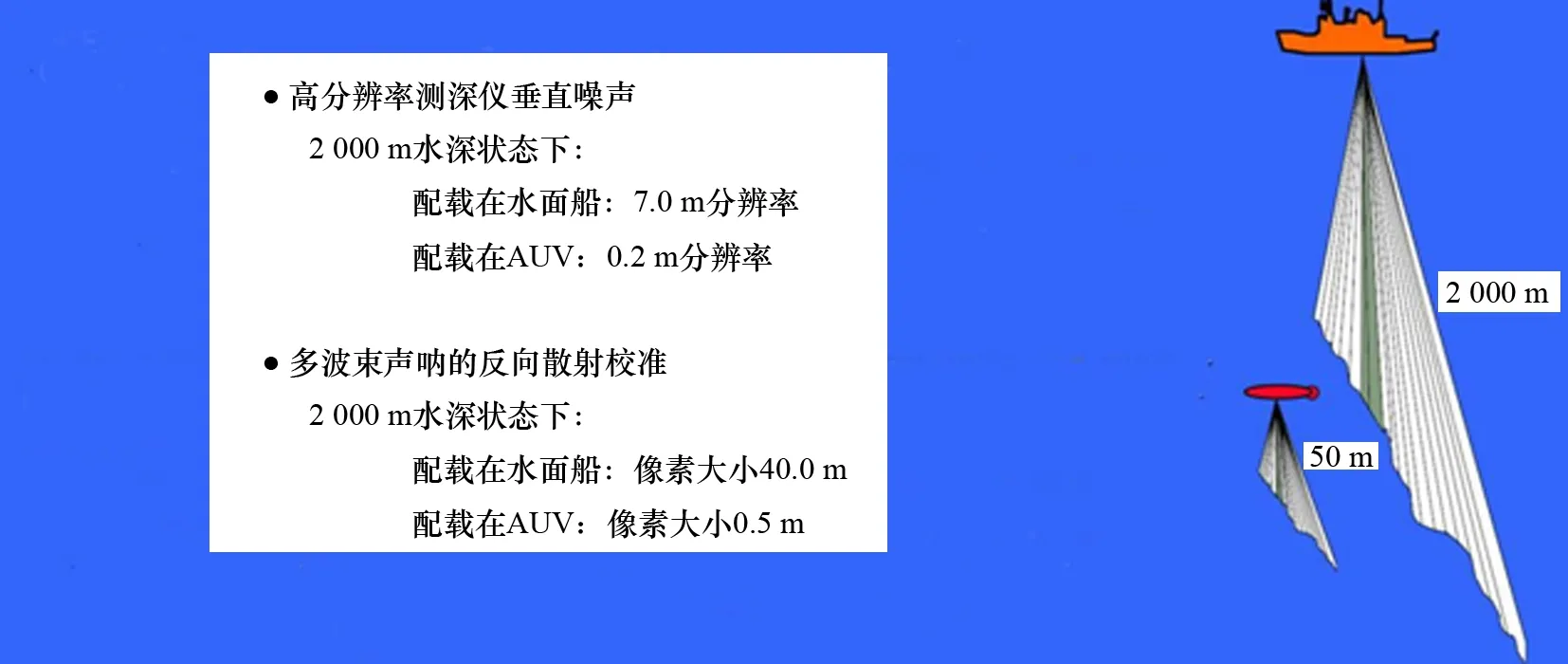
图5 AUV与船载声呐相比的优势
(3) 效率高。首先,与深拖系统相比,AUV能够以较高航速进行海底地形探测工作;其次,水面船拖曳的深拖系统进行探测工作时,为保证距海底十几米高度上的拖鱼不与海底相碰,从一个设定航线转入下一个设定航线时,必须通过绕半径几十公里大弯的方式回转,往往需要2~6 h完成一次180°的转弯运动,探测效率较低。AUV能够快速转弯,仅需要几分钟的时间就可进入下一个设定航线,探测效率较高。AUV在工作效率上的优势如图6所示。
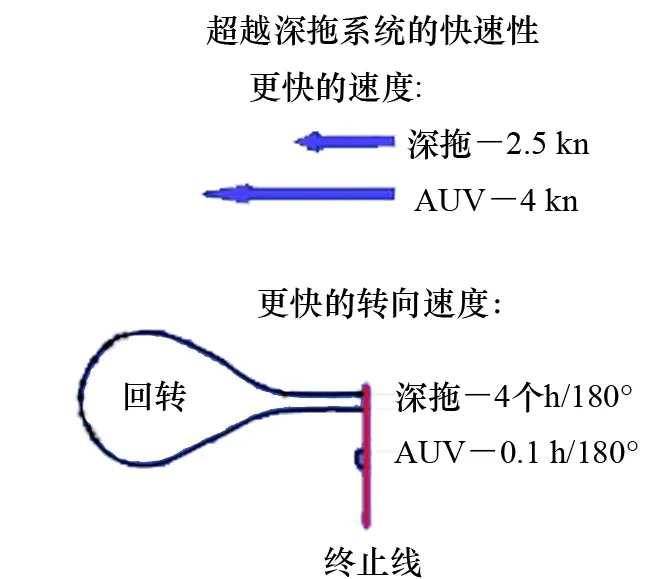
图6 AUV在工作效率上的优势
此外,通过智能水下机器人搭载多波束系统进行探测工作,能够在更好地发挥多波束系统高精度探测能力的同时,使得智能水下机器人执行更多、更全面的海上探测任务。
2 国内外应用现状
2.1 国外应用现状
近年来,国外很多高水平的探测水下机器人均搭载多波束系统[8],例如:搭载Reson 7100型号多波束系统的DORADO水下机器人、嵌入EM系列多波束系统的HUGIN系列水下机器人以及搭载Kongsberg EM 2000的Autosub-Ⅱ水下航行器。
美国Hydroid公司生产的REMUS-100,REMUS-600和REMUS-6000等REMUS(Remote Environmental Monitoring Units)系列智能水下机器人性能卓越,已经被多国采购。科学家们利用REMUS智能水下机器人完成了大量的海洋环境观测和数据采集试验。REMUS智能水下机器人及其探测的海底特征如图7所示。

图7 REMUS智能水下机器人及其探测的海底特征
此外,在对马来西亚航空失联班机MH370的搜救过程中,美国蓝鳍水下机器人公司所派出的“蓝鳍-21”水下机器人所搭载的是Reson 7125型号400 kHz的多波束系统,如图8所示。资料显示,该水下机器人长4.93 m,直径0.53 m,重750 kg,最大下潜深度为4 500 m,最大航速为4 kn,在标准负载情况下可以以3 kn航速航行25 h。

图8 “蓝鳍-21”水下机器人
除了美国以外,日本、英国、俄罗斯、法国和挪威等国家在应用智能水下机器人完成海洋探测方面也都取得了明显的、各有特色的成果,其中:日本、英国和俄罗斯在应用智能水下机器人完成海洋环境探测,特别是海洋地质、海洋环境数据获取等方面成果显著;法国和挪威在应用智能水下机器人完成海底管道的探测、海底地形地貌的探测方面业绩突出[9]。
2.2 国内应用现状
我国在多波束探测技术方面的研究起步较晚,直到20世纪80年代末,中国科学院声学研究所和天津海洋测绘研究所联合研制成861型多波束探测声呐实验样机。到20世纪90年代初,国家有关部门从国防安全和海洋开发的战略需要出发,委托哈尔滨工程大学主持,海军天津海洋测绘研究所和原中船总721厂参加,联合研制了用于中海型的多波束测深系统。2006年,哈尔滨工程大学成功研制了我国首台便携式高分辨浅水多波束测深系统,测量结果满足IHO国际标准要求,这种小型的低功耗多波束探测系统是在AUV上应用的基础,鉴定专家认为其主要技术指标达到当时国际同类产品先进水平,具有极大的推广价值[10]。
如今随着国内水下机器人技术的不断发展,我国在研制多波束系统的同时将多波束系统嵌入水下机器人,完善了水下机器人的工作能力并且更好地发挥了多波束系统的功能。哈尔滨工程大学水下机器人技术重点实验室进行了近20年的AUV技术方面的研究,研制了多款“智水”系列AUV及探测型潜水器,实现了多种水下自主作业演示试验,并在国内最早尝试将多波束测深系统应用在智能水下机器人上,实现了海底地形地貌的自主探测与扫描。综合探测AUV及其探测的不同海域地形如图9所示。
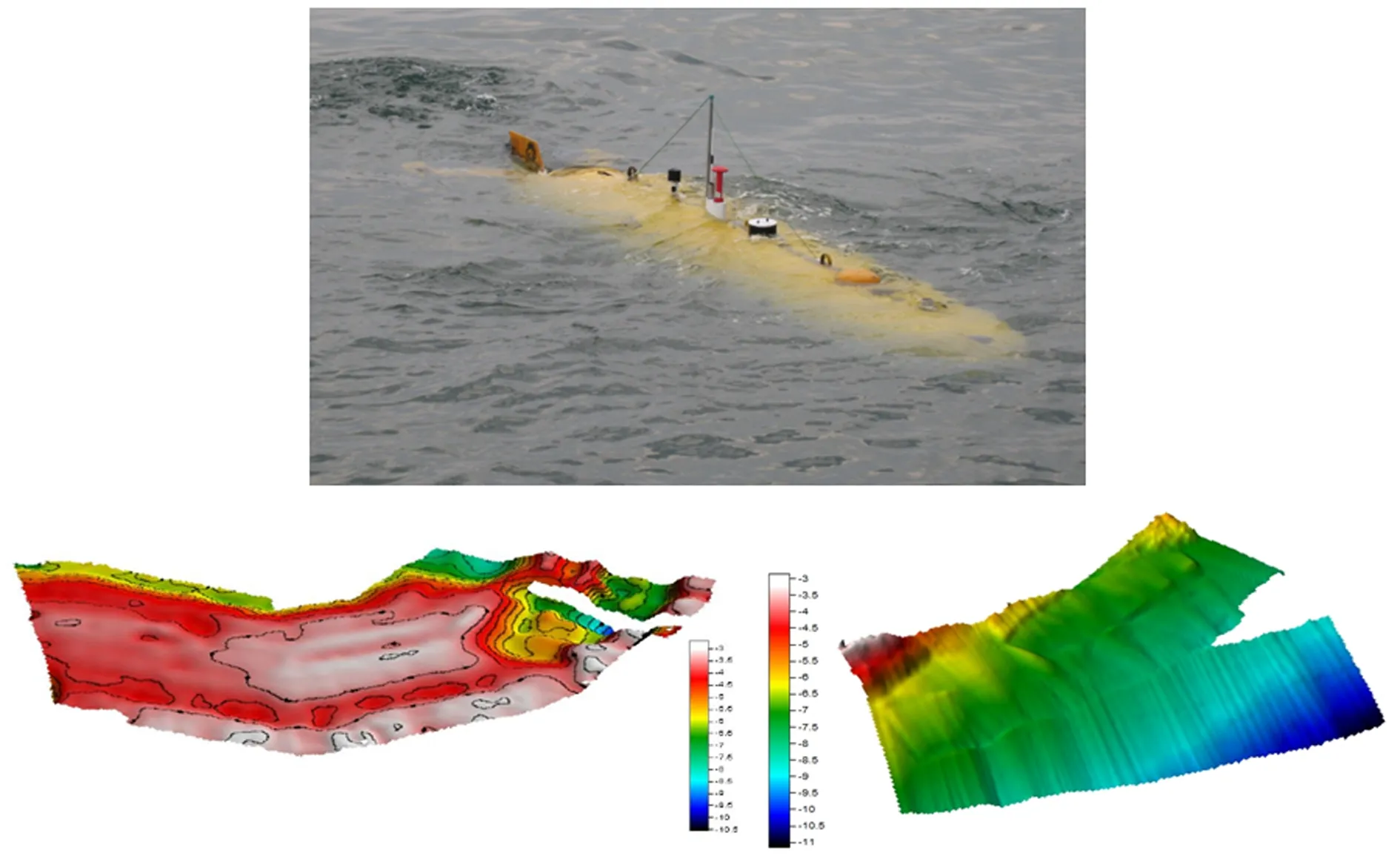
图9 综合探测AUV及其探测的不同海域地形
由天津大学和中海油田服务有限公司合作研发的3 000 m潜深水下机器人TUCOS-I便搭载Kongsberg EM 2040型号多波束系统执行深海地势地质测量任务[11]。TUCOS-I智能水下机器人声呐系统组成如图10所示。TUCOS-I水下机器人在水下执行任务时,会向EM 2040多波束系统提供瞬时姿态、位置、艏向等运动参数以及高度信息和即时声速信息,以便多波束系统整合探测信息。

图10 TUCOS-Ⅰ 智能水下机器人声呐系统组成
图11为哈尔滨工程大学研制开发的300 kg级小型AUV。为了实现在海洋资源考察、海底地形地貌探测、海洋数据采集等方面所需要的高精度需求,该AUV除了搭载常规的侧扫声呐系统外,也配备了GeoSwath Plus多波束系统,实现了小型化、智能化、高精度的水下地形探测系统。
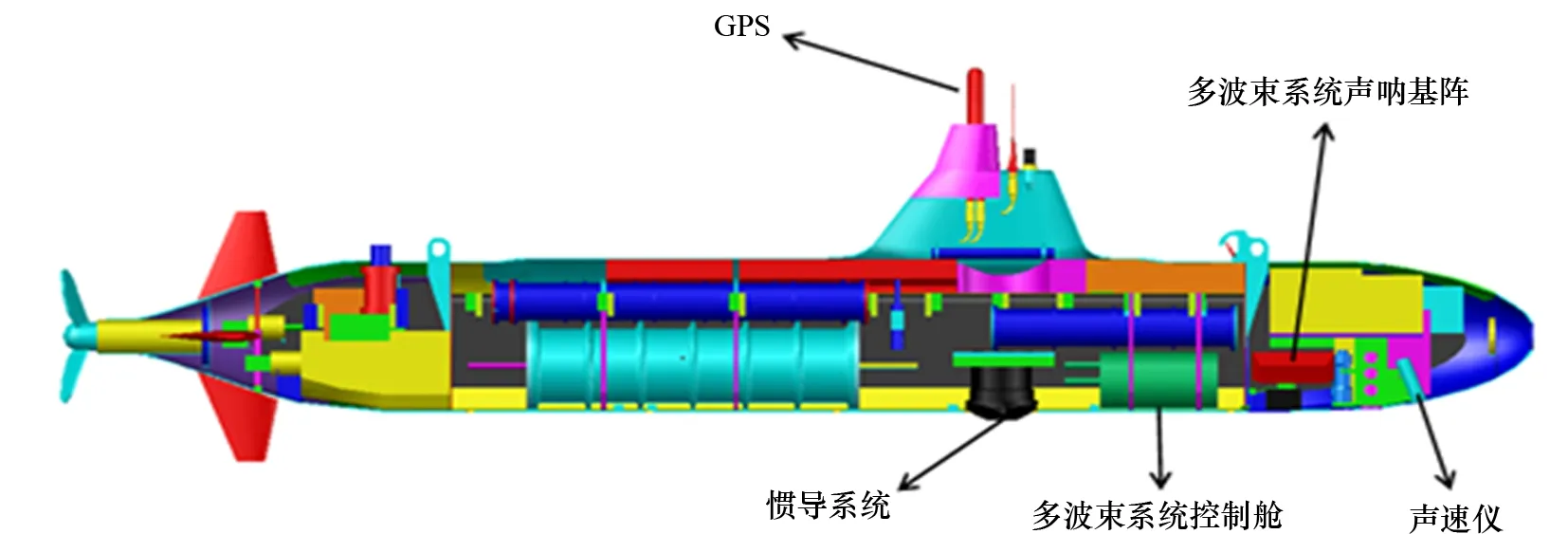
图11 300 kg水下机器人多波束系统布置图
此外,国内多家研究所和公司所研发的水下机器人也搭载多波束系统,虽然实际应用仍在初步阶段,但是对其探测系统的研究在不断发展。不仅是水下机器人,其他无人载体,例如水面无人艇,为了加强探测能力,也开始搭载多波束系统。实现多波束系统在无人载体中的应用同样解决了传统船载多波束探测存在的问题。
3 应用中的问题及展望
实现多波束系统在智能水下机器人中的应用,需要综合考虑多波束系统和水下机器人载体二者的工作原理和特性,进行探测前的校准准备工作以及路径规划工作都与传统多波束探测有差异。因此,在实际应用过程中,可能存在以下问题:
(1) 多波束系统在水下机器人中的布置方式不同于传统船载多波束系统。搭载试验设备的水面实验船一般体积较大、吃水较深,多波束系统的安装位置对载体船的航行性能基本不会产生影响,因此在进行设备安装时只需要满足多波束系统的工作要求即可。但是,AUV是一种小型水下探测载体,多波束系统的布置会对载体的航行性能产生影响,因此在安装时要综合AUV载体和多波束系统的两方面要求进行分析和布置,以保证地形探测任务的正常进行。
(2) 船载多波束系统进行实时探测过程中,外围设备如GPS、姿态传感器等设备与多波束系统的控制计算机直接连接,多波束系统直接接收相关信息数据,融合生成地形信息。然而对于AUV来说,深度计、高度计、GPS和姿态传感器等设备的信息要首先由AUV的控制计算机获取,保证载体的正常工作,而后外围设备的信息通过网络传输给多波束系统进行信息融合。这个过程中会产生信息获取的时间延迟,导致探测结果存在误差,减小时延误差是实际应用过程中的重要环节。
(3) 在进行探测任务时,船载多波束系统可以根据需要实时改变航线,但是AUV在进行探测之前需完成探测路径的规划工作。需要结合实际水域情况、AUV航行性能以及多波束系统的工作要求三方面进行分析规划,以保证探测工作的顺利完成。
近年来,随着海洋油气工业的发展,特别是深海油气工程的发展,对海洋调查、海底考察、海底管线探测等方面的需求越来越大。AUV已经成为支撑深海探查和开发深海资源、开展深海科学研究、辅助进行深海工程作业的重要技术手段和装备之一。我国也正在加快海洋油气资源的勘探开发,迫切需要在海洋油气管道铺设前进行海底调查、铺设中的状态监测、铺设后及使用过程中的状态检测等工作。AUV搭载多波束探测系统以其低成本、高精度和高效率的性能优势备受关注,对其研究和应用将成为深海探测领域的重要发展方向。
4 结语
随着国内智能水下机器人技术的不断发展,将多波束系统应用到水下机器人中可以更好地发挥其水下探测能力。但是在国内,多波束系统在水下机器人中的应用技术仍然处在探索阶段,需要在理论基础上进行大量试验以优化其应用效果,并且需要自主研发适合AUV搭载的低功耗小型多波束系统,才能真正实现将多波束系统融合在水下机器人的无人系统中,完美地进行水下地形探测工作。
[1] HEWITT A N, MALASPINA S, PUNZO E, et al. Using Multi-Beam Echosounder Data for a GIS-Ready Seafloor Characterization in the Adriatic Sea[C]// MTS/IEEE OCEANS 2015-Genova: Discovering Sustainable Ocean Energy for a New World, Genova, Italy , 2015: 18-21.
[2] SEN A, ONDRÉAS H, GAILLOT A.The Use of Multi-Beam Backscatter and Bathymetry as a Means of Identifying Faunal Assemblages in A Deep-Sea Cold Seep [J]. Deep-Sea Research, 2016(10): 33-49.
[3] 陆秀平,黄谟涛,翟国君,等.多波束测深数据处理关键技术研究进展与展望[J]. 海洋测绘, 2016, 36(4):1-6.
[4] WADHAMS P. The Use of Autonomous Underwater Vehicles to Map the Variability Of Under-Ice Topography [J].Ocean Dynamics, 2012, 62(3):439-447.
[5] SUN Y S, WAN L, GAN Y, et al. Design of Motion Control of Dam Safety Inspection Underwater Vehicle [J]. Journal of Central South University, 2012, 19(6): 1522-1529.
[6] MALEIKA W. The Influence of Track Configuration and Multi-Beam Echosounder Parameters on the Accuracy of Seabed DTMs Obtained in Shallow Water [J]. Earth Science Informatics, 2013, 6(2): 47-69.
[7] YANG F L, LI J B, LIU Z M. Correction for Depth Biases to Shallow Water Multi-Beam Bathymetric Data [J]. China Ocean Engineering, 2013, 27(2): 245-254.
[8] NAKAMURA K, TOKI T, MOCHIZUKI N, et al. Discovery of a New Hydrothermal Vent Based on an Underwater High-Resolution Geophysical Survey[J]. Deep-Sea Research I, 2013,74:1-10.
[9] GUSTAFSON E, JALVING B, ENGELHARDTSEN Φ, et al. HUGIN1000 Arctic Class AUV[C]//Proceedings of Arcitc Technology Conference Society of Petroleum Engineers,Houston,USA,2001.
[10] 傅仁琦,沈正一,高博.国产多波束系统在海上失事船只探测中的应用[J].舰船科学技术,2015,37(8):153-156.
[11] WANG Y H. Measurement Error Analysis of Multi-Beam Echosounder System Mounted on the Deep-Sea Autonomous Underwater Vehicle[J].Ocean Engineering,2014,91:111-121.
Application Prospect of Multi-Beam Echosounder on AUV
SUN Yushan1,2, LI Youren1,2, SHENG Mingwei1,2,PANG Yongjie1,2, ZHANG Guocheng1,2
(a.Science and Technology on Underwater Vehicle Laboratory,b. College of Shipbuilding Engineering, Harbin Engineering University, Harbin 150001, China )
Traditional shipborne MBES has many problems such as low precision, high cost and low efficiency when it is used for deep-sea exploration, and it can’t fully meet the needs of deep-sea exploration. It has become an important development trend to use Autonomous Underwater Vehile(AUV) for deep-sea exploration and investigation. The defects of the traditional operation mode of the MBES and the advantage of the MBES equipped on the AUV for deep-sea exploration integrating the feature of the AUV are analyzed.The domestic and foreign application status are introduced. The problems which may be encountered during the application and the prospect of this research are proposed.
Autonomous Underwater Vehicle(AUV); multibeam echosounder; application prospect
2016-05-23
国家“863”计划资助项目(2011AA09A106)
孙玉山(1973-),男,副教授
1001-4500(2017)02-0014-07
P75
A
猜你喜欢
成都信息工程大学学报(2021年6期)2021-02-12
舰船科学技术(2020年3期)2020-04-22
小哥白尼(趣味科学)(2019年7期)2019-11-16
通信技术(2019年3期)2019-05-31
学苑创造·A版(2017年4期)2017-05-13
学苑创造·A版(2017年5期)2017-05-09
少儿科学周刊·少年版(2015年4期)2015-07-07
少儿科学周刊·少年版(2015年4期)2015-07-07
少儿科学周刊·少年版(2015年4期)2015-07-07
舰船科学技术(2015年8期)2015-02-27