
可识别载荷方位区间的MEMS万向惯性开关
2017-05-25 00:37席占稳聂伟荣余平新
探测与控制学报 2017年2期
孔 南,席占稳,聂伟荣,曹 云,余平新
(南京理工大学机械工程学院,江苏 南京210094)
可识别载荷方位区间的MEMS万向惯性开关
孔 南,席占稳,聂伟荣,曹 云,余平新
(南京理工大学机械工程学院,江苏 南京210094)
针对现有MEMS万向惯性开关不具备识别冲击载荷方位的问题,提出了可识别载荷方位区间的MEMS万向惯性开关。该开关主要由惯性质量块,四个独立的径向电极和一个轴向电极组成。通过采用特殊形状的惯性质量块以及在空间上合理布置四个相互独立的径向电极和一个轴向电极,开关可以依靠不同的电极闭合状态达到识别载荷方位区间的目的。仿真结果表明,所设计的万向惯性开关能够有效识别加速度载荷的空间方位且具有良好的抗过载性能。
MEMS;惯性开关;方位识别
0 引言
MEMS惯性开关是采用微加工技术制造的加速度传感器,它利用惯性敏感元件将加速度信号转换为开关电极之间的位移信息,然后通过电极接触触发相应电信号,从而达到区分加速度载荷大小的功能。由于其体积小、重量轻、能耗低、抗过载能力强、抗电磁干扰能力强、响应时间短、便于与数字电路集成等优点,MEMS惯性开关在工业振动检测、汽车工业、武器弹药等领域具有巨大的应用前景[1-5]。
近年来随着MEMS惯性开关从单轴向敏感到多轴向敏感,从单阈值到多阈值的发展,国内外研究人员设计了多种MEMS惯性开关。Luke J.Currano等人将阈值不同的五个开关集成在一起制造了一个能够区别X,Y,Z方向加速度的多阈值惯性开关[6]。在我们以前的工作中,也研制了多种带有柔性电极的万向惯性开关[7-8]。但是这些均只是针对加速度大小的开关,并不能识别出所受载荷的方位信息。然而物体所受载荷的方位是一个重要的信息,在定向起爆战斗部等方面可识别载荷方位的开关有着巨大的应用潜力。
一般的战斗部其杀伤元素的静态分布基本上是围绕战斗部纵轴沿径向均匀分布的。在轴向,杀伤元素集中在“飞散角”这一或宽或窄的区域内,不管目标位于战斗部的哪个方位,在战斗部爆炸瞬间,目标在战斗部杀伤区内只占很小一部分,战斗部杀伤元素的大部分并未得到利用[9]。通过在引信中引入可识别载荷方位区间的MEMS万向惯性开关,弹丸碰击目标时,开关可以识别出目标相对于弹丸的方位区间,并实施战斗部的定向起爆,这将大大增加了战斗部对目标的杀伤能力。本文针对上述问题,提出了可识别载荷方位区间的MEMS万向惯性开关。
1 结构设计与理论分析
1.1 开关结构
开关整体结构如图1所示,主要由惯性质量块、支撑弹簧、轴向电极、径向电极、限位止挡柱、锚点、衬底等部分构成。开关衬底材料为硅,其他部分均为金属镍材料。带有矩形凸起的环形质量块由四个蛇形弹簧支撑并通过锚点固定在绝缘衬底上。在质量块的径向平面内,四个相互独立的径向电极均匀分布在质量块的周围,且与质量块保持一定的径向间隙。支撑弹簧采用的S型锥弹簧,不仅保证质量块可以有较大的位移响应,也使得结构具有良好的拉伸压缩稳定性[10]。径向电极采用L形悬臂梁的形式,使得开关具有良好的接触性能,不仅能提高开关在闭合过程的稳定性和可靠性,也延长了开关闭合时间。环形轴向电极设置在质量块的上方并与质量块保持一定的轴向间隙。限位止挡柱位于质量块的中心,用于限制质量块的过大位移,保护开关在过载加速度作用下不被损坏。

图1 惯性微开关结构Fig.1 Scheme of the inertia micro-switch device
1.2 方位区间识别原理
当惯性开关受到径向的加速度作用时,质量块沿径向运动与径向电极的触点接触。当有沿轴向(Z轴)方向的加速度作用时,质量块沿轴向运动与环形轴向电极接触。当加速度方向与轴向方向成一定角度时,如图2所示,将惯性力分解到Z轴方向以及XOY平面内,Z轴方向的分量使质量块沿Z轴运动与轴向电极接触,XOY平面的分量使质量块沿径向运动与径向电极接触。

图2 加速度方位示意图Fig.2 Acceleration orientation schematic
载荷的空间方位是由平面角θ(载荷在XOY平面的分量与X轴夹角)和空间角δ(载荷与XOY平面的夹角)共同决定的。因此载荷的空间方位识别可视为对θ,δ两个角度的识别。
开关对平面角θ的识别是依靠开关在工作过程中四个径向电极的闭合状态不同来实现的。如图3(a)所示,在冲击载荷作用下质量块只与四个径向电极中的一个电极接触(例如电极1)并形成闭合通路时,可判断平面角θ处于Ⅰ和Ⅷ区即(315°~45°)内。当质量块分别与径向电极2、3、4单独接触时,情况与之类似。同理,如图3(b)所示,在冲击载荷作用下质量块与四个径向电极中相邻的两个电极(例如径向电极1和2)同时接触,并形成两个闭合通路时,可判断平面角θ处于Ⅰ和Ⅱ区即(0°~90°) 内,当质量块分别与径向电极2和3、3和4、4和1同时接触时,情况与之类似。

图3 电极闭合状态示意图Fig.3 Contact state of the electrodes schematic.
为了检测电极的闭合状态,本文采用电阻网络的形式设计一种电极闭合状态检测电路,如图4(a)所示。其中开关K1,K2,K3,K4分别代表图3中径向电极1,2,3,4的闭合。开关K5代表轴向电极的闭合。VI为电路的输入,VO1和VO2分别为开关的径向和轴向输出,具体电路与结构连接如图4(b)所示。因为电极闭合状态的不同会引起电阻网络接通电阻发生变化,从而引起输出电压VO1和VO2的改变。因此通过VO1和VO2的输出情况来检测径向电极和轴向电极的闭合状态以及闭合顺序是可行的。因为开关的结构设计使得质量块在运动时至多与两个径向电极同时接触,所以径向电极可能有下述的8种状态。具体的径向电极闭合状态与输出电压VO1以及载荷平面角θ方位对应关系如表1所示。

图4 电极闭合状态检测电路Fig.4 The circuit of detecting state of electrodes
表1 径向电极的闭合状态与电路输出、载荷平面角θ方位的对应关系
Tab.1 The corresponding relationship of the electrode state ,circuit output and orientation intervals ofθ

闭合状态闭合电极输出电压VO1平面角θ所处方位区间状态112/3VIⅠ和Ⅷ(315°~45°)状态221/2VIⅡ和Ⅲ(45°~135°)状态331/3VIⅣ和Ⅴ(135°~225°)状态441/4VIⅥ和Ⅶ(225°~315°)状态51和23/4VIⅠ和Ⅱ(0°~90°)状态62和33/5VIⅢ和Ⅳ(90°~180°)状态73和45/11VIⅤ和Ⅵ(180°~270°)状态84和17/10VIⅦ和Ⅷ(270°~0°)


图5 开关结构模型Fig.5 The model of switch structure
表2 轴、径向电极的闭合顺序与电路输出情况以及空间角δ所处区间的对应关系
Tab.2 The corresponding relationship of the axial and radial electrodes closing sequence, the circuit output and the orientation intervals of δ

可能状态轴、径向电极闭合顺序电压输出情况δ角方位区间状态1径向闭合、轴向未闭合VO1有输出VO2无输出①区即(0°~δ1)状态2径向先于轴向闭合VO1先于VO2输出①区即(0°~δ1)状态3轴向闭合、径向未闭合VO2有输出VO1无输出③区即(δ2~90°)状态4轴向先于径向闭合VO2先于VO1输出③区即(δ2~90°)状态5轴、径向同时闭合VO1与VO2同步输出②区即(δ2~δ1)
表2中,δ1=tan-1(d1/rmin)=60.95°,δ2=tan-1(d1/rmax)=48.37°,表1中8种径向电极闭合状态都可视作“径向闭合”。“轴向闭合”只有一种状态,此时VO2的输出电压为VI,空间角δ分区见图7。
因此通过载荷平面角θ的8个区位识别和在空间角的δ的3个区位识别,我们可以实现加速度载荷在整个半球面空间内的方位区间识别。
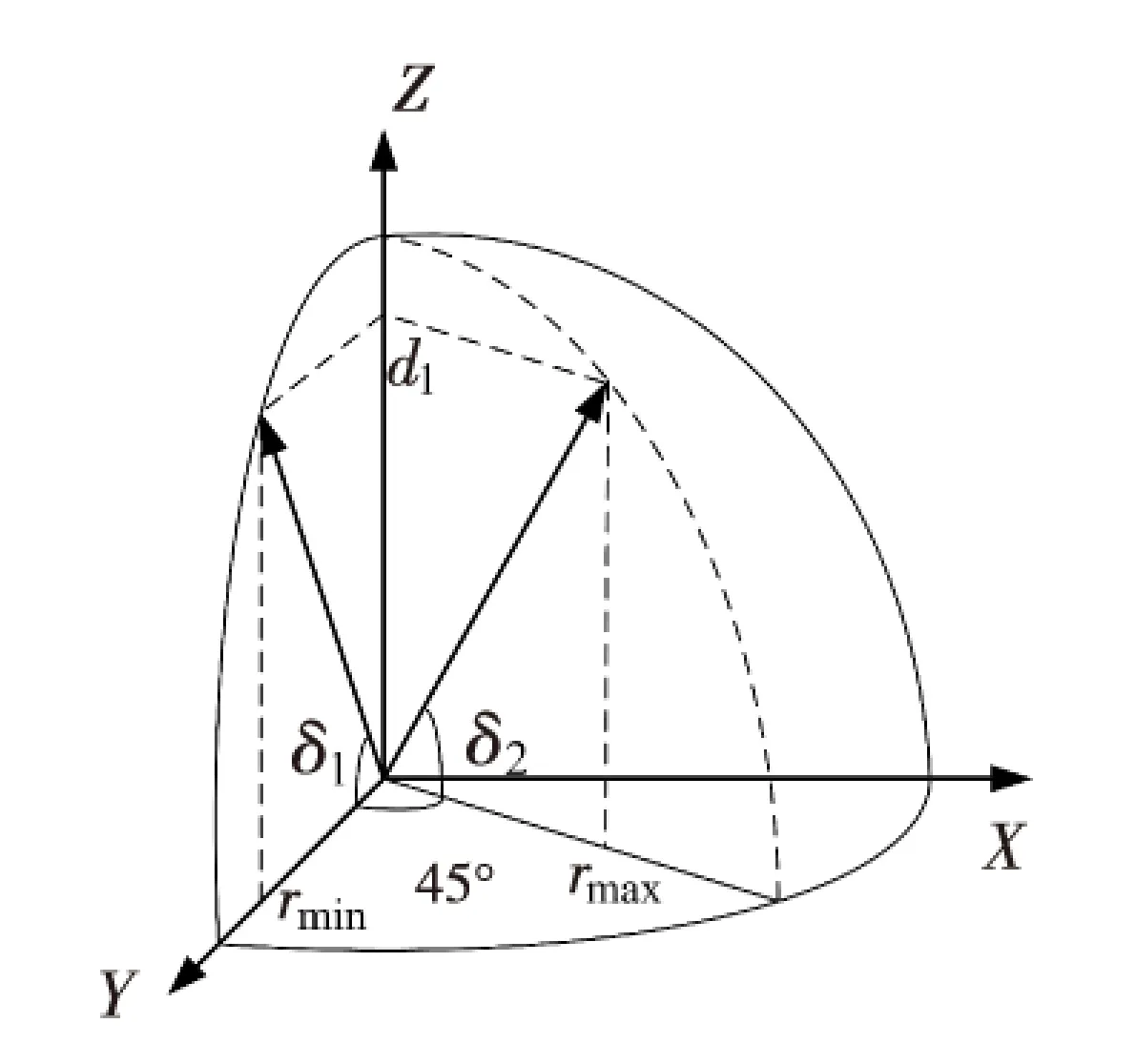
图6 δ1和δ2的空间示意图Fig.6 The schematic diagram of δ1 and δ2 in the space
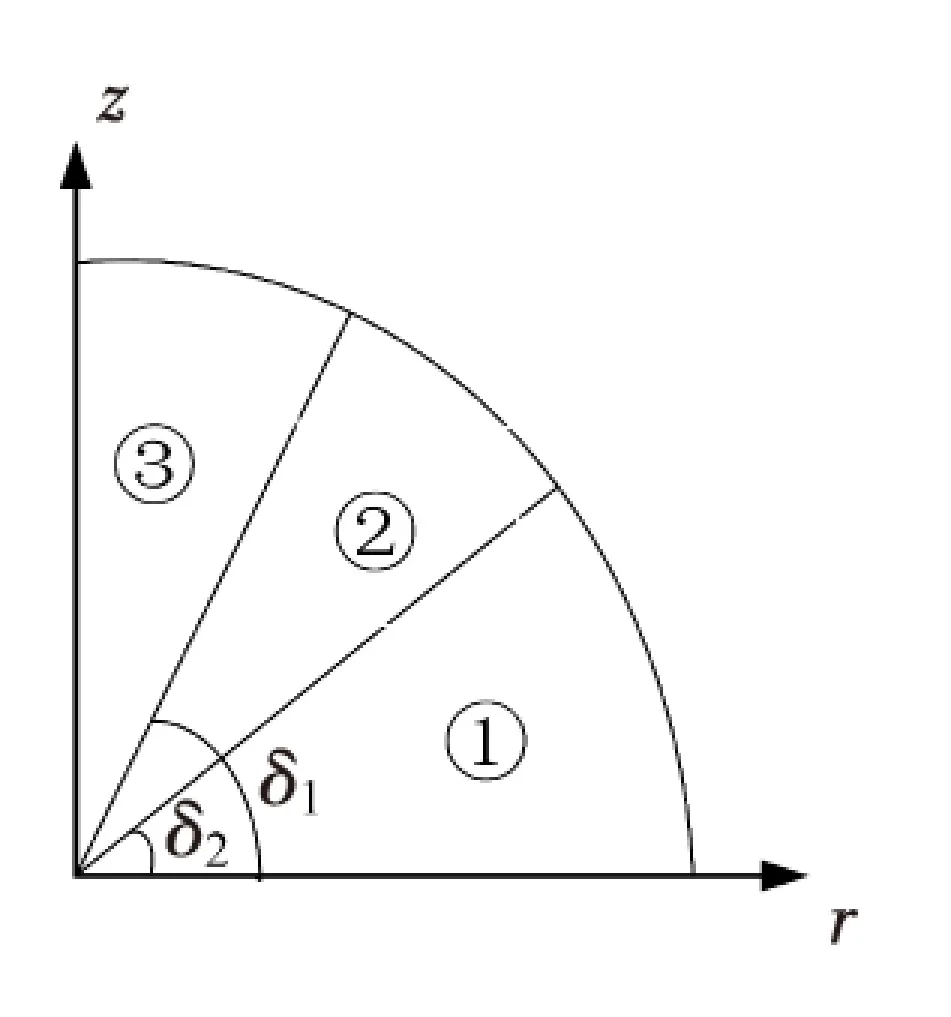
图7 空间角δ区位划分Fig.7 Geographical division of the δ
2 仿真分析
开关结构采用电铸镍材料,其弹性模量为180 GPa,泊松比为0.312,密度为8 910 kg/m3,屈服应力为160 GPa[11-13]。开关主要结构参数如表3所示,采用ANSYS Workbench建立开关的有限元模型如图8所示,并对其进行仿真分析。

图8 微开关有限元模型Fig.8 Microswitch finite element model
2.1 模态分析
弹簧质量系统前四阶模态如图9所示。第一,第二阶振型分别为质量块沿X方向与Y方向的平动,模态频率分别为1 492 Hz,1 492.2 Hz。第三阶振型为垂直质量块平面的上下振动,模态频率为1 747.5 Hz。开关的第四阶振型为绕Z轴的旋转运动,模态频率为3 265 Hz,远离前三阶工作模态,可避免在工作过程中质量块发生翻转和扭转。
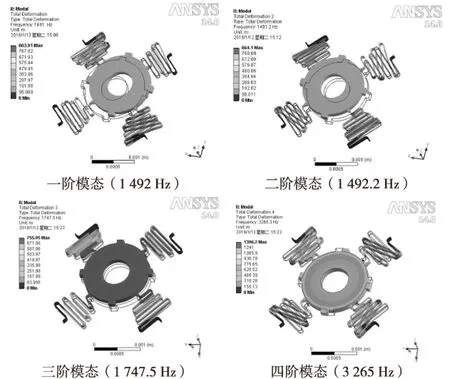
图9 弹簧质量系统的前四阶模态频率Fig.9 The first four natural frequencies of the spring-mass system
2.2 开关阈值分析
由于弹丸撞击目标过程相当复杂,目标介质,弹丸的入射角度和入射速度对前冲力的大小都有很大影响。对于土壤、混泥土、钢板、木材、水等不同目标介质,一般都釆用半经验公式来求得前冲力具体大小。有仿真表明[14],当弹丸的初速度分别为600 m/s,750 m/s和900 m/s时,侵彻混凝土介质时的加速度脉宽分别为600 μs,450 μs和350 μs左右;侵彻钢板层时的加速度脉宽分别为1 200 μs,900 μs和700 μs左右,因此本文暂选用脉宽为1 ms半正弦冲击信号对开关进行仿真。通过在X轴施加脉宽为1 ms,幅值可变的半正弦波信号,利用ANSYS Workbench软件仿真惯性开关在X轴方向的阈值。设定质量块与径向电极之间的初始间隙为50 μm, 当幅值为290g时,质量块的最大位移为50 μm,惯性开关恰好接通,因此可知开关在X轴方向的阈值加速度ath为290g,如图10所示。
为了进一步验证开关在不同方向上的闭合阈值,分别在平面角θ为0°,15°,30°,45°,空间角δ为0°,15°,30°, 45°,60°,75°,90°方向上施加脉宽为1 ms,幅值变化的半正弦加速度信号,求得开关在三维空间的阈值分布如表4-表6所示。

图10 不同加速度下质量块的位移时间曲线Fig.10 Displacement-time curve of the mass under different acceleration

θ/(°)0153045ath/g290300335410闭合电极1111&2

表5 X45OZ平面内开关的阈值
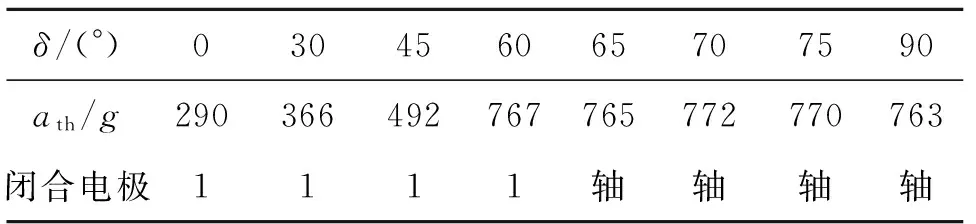
表6 X0OZ平面内开关的阈值
表中,“1”,“1&2”,“轴”分别为“径向电极1”、“径向电极1和2”、“轴向电极”。
由表4-表6可以看出开关在径向平面内阈值加速度大小的为290~410g之间,沿轴向方向阈值在763g。在整个半球面内阈值的最大值796g出现在θ=45°,δ=60°处,阈值的最小值290g出现在θ=0°,δ=0°(沿X轴方向)。
2.3 方位识别仿真验证
开关在空间角δ=0°,载荷平面角θ为0°,22.5°,30°,40°,45°的方向上分别施加脉宽1 ms幅值470g的半正弦加速度载荷仿真开关径向电极的接触状态,如表7所示。

表7 不同方向施加470 g-1 ms载荷时开关径向电极闭合状态
由表7可以看出在XOY平面内不同方向施加470g-1 ms载荷,在载荷平面角较小时(0°,22.5°,30°,38°),只有径向电极1闭合,在载荷平面角较大时(40°,45°),径向电极1和2均闭合。为了准确得到在470g-1 ms载荷下开关的单一电极闭合区和双电极闭合区,在30°~40°之间改变θ做进一步仿真,得到单一电极闭合区和双电极闭合区的临界角度为39°,如图11(c)所示,此时质量块与电极1接触,电极2刚好达到临界接触。因此470g-1 ms加速度载荷下开关的单一电极闭合区为(0°,39°),双电极闭合区为(39°,45°),也就是说在470g-1 ms加速度载荷下,只有电极1闭合时,加速度方向位于(0°,39°),电极1和2均闭合时,加速度方向位于(39°,45°)。
同理可以得到开关在410g-1 ms,430g-1 ms,550g-1 ms,600g-1 ms加速度载荷作用下的单一电极闭合区和双电极闭合区的临界角分别为45°,42°,38°,38°,如图11(a),11(b),11(d),11(e)所示。在图11(d)和(e)中的质量块位移曲线有明显的突变转折是因为此时加速度载荷过大,限位止挡柱已经起到限位止挡的作用。由于限位止挡柱的作用,开关在过载加速度下(大于550g-1 ms)单一电极闭合区和双电极闭合区的临界角将保持不变。由图11中五幅图可以看出在加速度幅值小于550g时随着加速度载荷幅值的增大,单一电极闭合区和双电极闭合区的临界角不断减小,当加速度幅值大于550g时临界角将保持为38°不再变化。因此单一电极闭合区和双电极闭合区的临界角始终落在[38°,45°]中,验证了平面角θ的区位识别方案是可行的,即不管加速度幅值如何变化,当开关电极1和2均闭合时可判断此时开关所受加速度载荷平面角θ在[0°,90°]区间内,当开关只有电极1闭合时可判断此时开关所受加速度载荷平面角θ在[315°,45°]区间内。
开关在平面角θ=0°,空间角δ为0°,30°,45°, 60°,65°,70°,75°,90°的方向上分别施加脉宽1 ms幅值为1.2倍各方向阈值的半正弦加速度,仿真开关轴、径向电极的响应时间如表8所示。

表8 不同δ下轴、径向电极响应情况
由表8可以看出当δ为0°,30°时开关只有径向电极闭合;当δ为45°,60°时开关径向先于轴向电极闭合;当δ为65°,70°时开关轴向先于径向电极闭合;当δ为75°,90°时开关只有轴向电极闭合,仿真结果与表2中所描述一致,因此验证了通过轴、径向电极闭合的闭合状态及先后顺序来识别载荷空间角δ的方案是可行的。
2.4 开关抗过载性能分析
弹丸在意外跌落和发射时的后坐载荷都能够达到上万g,为保证MEMS万向开关的正常工作,开关在这些高过载条件下,不能发生断裂或塑性变形,即开关受到的最大应力不能超过材料屈服极限。当加速度为20 000g时质量块与限位止挡柱接触,由于止挡柱的作用质量块的运动位移只能为80 μm。如图12所示,开关结构在20 000g的加速度作用下,质量块运动到最大位移处,支撑弹簧和径向电极上的应力分布云图。此时支撑弹簧和径向电极的最大应力为626 MPa,小于电铸镍材料的屈服极限1 600 MPa,且最大应力出现在径向电极根部,故开关能够抵抗20 000g的高过载。

图12 在20 000 g加速度载荷下的开关结构的应力云图Fig.12 Stress cloud of the switch structure under 20 000 g acceleration load
3 结论
本文提出了可识别载荷方位区间的引信用MEMS惯性开关。该开关采用带有矩形凸起的环形质量块作为可动电极,在径向平面内布置了四个均匀分布的L形悬臂梁作为径向电极、轴向方向布置了一个环形轴向电极。开关可以依靠工作过程中电极闭合状态的不同达到识别载荷方位区间的目的。仿真结果表明,开关可以有效识别冲击载荷的空间方位且可以承受20 000g高过载冲击。
[1]王辅辅,娄文忠.微机电技术在引信中的应用综述[J].探测与控制学报,2016,38(3):22-28.
[2]OngkodjojoA,TayFEH.OptimizeddesignofamicromachinedG-switchbasedoncontactlessconfigurationforhealthcareapplications[J].JournalofPhysics:ConferenceSeries, 2006, 34:1044-1052.
[3]McNamaraS,GianchandaniYB.LIGAfabricated19-elementthresholdaccelerometerarray[J].SensorsActuatorsA, 2004,112(1):175-183.
[4]TadaoM,MasayoshiE.Accelerationswitchwithextendedholdingtimeusingsqueezefilmeffectforsideairbagsystems[J].SensorsActuatorsA, 2002,100(1):10-17.
[5]ZhaoJ,JiaJ,WangH,etal.Anovelthresholdaccelerometerwithpostbucklingstructuresforairbagrestraintsystems[J].IEEESensorsJournal, 2007,7 (8):1102-1109.
[6]LukeJ.Currano,CollinR.Becker,DavidLunking,etal.Triaxialinertialswitchwithmultiplethresholdsandresistiveladderreadout[J].SensorsandActuatorsA:Physical, 2012, 29(6):1-6.
[7]XiZhanwen,ZhangPing,NieWeirong,etal.AnovelMEMSomnidirectionalinertialswitchwithflexibleelectrodes[J].SensorsandActuatorsA:Physical,2014, 212 :93-101.
[8]CaoYun,XiZhanwen,YuPingxin,etal.AMEMSinertialswitchwithasinglecircularmassforuniversalsensitivity[J].JournalofMicromechanicsandMicroengineering,2015 ,25(10):1-12.
[9]邹金龙.智能弹药中智能引信的作用[J].制导与引信,2012,33(4):1-8.
[10]周织建, 聂伟荣, 席占稳.MEMS平面S型锥形弹簧的特性分析研究[J].微电子学,2014, 44(4): 559-564.
[11]张段芹.微构件拉伸测试技术及其力学性能研究[D].大连:大连理工大学, 2009.
[12]郑利兵, 石庚辰, 韩立.基于LIGA工艺的电铸镍材料特性[J].功能材料与器件学报,2010(3):222-226.
[13]钱建刚, 李彭瑞, 李海婷.溶液组分对电铸镍组织和力学性能的影响[J].航空材料学报, 2014, 34(2): 11-16.
[14]刘伟钊, 陈侃, 李蓉,等.不同介质侵彻过载特征参量有限元仿真方法[J].科学技术与工程, 2011(15):3494-3497.
MEMS Omni-directional Inertial Switch with Load Azimuth Interval Identify
KONG Nan, XI Zhanwen, NIE Weirong, CAO Yun,YU Pingxin
(School of Mechanical Engineering, Nanjing University of Science and Technology, Nanjing 210094, China)
In order to solve the problem of lack of ability to identify the azimuth interval of impact load, a MEMS inertial switch was designed to distinguish interval azimuth of load. The switch was mainly composed of inertial mass, four radial electrodes and an axial electrode. With four separate radial electrodes and an axial electrode arranged around the inertial mass, the switch could distinguish azimuth interval of impact load by detecting contact state of electrodes. The simulation results indicated that the switch could effectively identify the azimuth interval of impact load in the space and had a good anti-overload performance.
MEMS; inertial switch; azimuth interval recognition
2016-12-08
国家自然科学基金项目资助(51475245)
孔南(1990—),男,河南南阳人,硕士研究生,研究方向:微机电系统设计。E-mail:njustkongn@sina.com。
TJ430
A
1008-1194(2017)02-0013-06
猜你喜欢
幼儿园(2021年12期)2021-11-06
航空发动机(2021年1期)2021-05-22
语数外学习·高中版中旬(2020年7期)2020-09-10
新世纪智能(数学备考)(2020年6期)2020-07-17
北京航空航天大学学报(2017年2期)2017-11-24
北京航空航天大学学报(2017年4期)2017-11-23
小学生时代·大嘴英语(2015年7期)2015-11-23
为了孩子(孕0~3岁)(2009年6期)2009-07-15
数理化学习·高三版(2009年3期)2009-04-30
中学数学研究(2008年5期)2008-12-10
