基于自适应永磁电机的混沌反控制研究
2017-05-22 06:22尚志建
沈阳工程学院学报(自然科学版) 2017年2期
李 忱,陈 万,尚志建
(1.国网沈阳供电公司, 辽宁 沈阳 110003; 2.大连花园口经济区城乡建设管理局质监站,
基于自适应永磁电机的混沌反控制研究
李 忱1,陈 万2,尚志建3
(1.国网沈阳供电公司, 辽宁 沈阳 110003; 2.大连花园口经济区城乡建设管理局质监站,
辽宁 大连 116422; 3.国网辽宁省电力有限公司 检修分公司,辽宁 沈阳 110136)
基于混沌非线性控制理论,建立了永磁调速器物理模型和二阶自治数学模型。使用C-C方法重构相空间,准确地求得相空间嵌入维、延时时间,给出了永磁电机混沌系统最大Lyapunov指数的计算方法。提出了采用混沌自适应法控制永磁电机系统的思想,以Duffing系统为跟踪对象,设计了自适应控制器系统。通过SIMULINK建模仿真发现,永磁电机动力学方程稳态下和参数变化时,系统最大Lyapunov指数分别为0.655和0.814。参数变化时,混沌吸引子迅速进入稳定状态,具有良好抗扰性,该研究方法可为永磁电机控制系统设计提供理论依据。
永磁电机;Lyapunov指数;混沌反控制;自适应法
自上世纪六七十年代以来,混沌研究已成为非线性科学领域最为活跃的分支。起初为了避免某些混沌特征对系统稳定性和可靠性造成危害,开始研究如何有效地抑制这种特性。后来,经典的混沌控制方法被提出来,如OGY方法[1]、自控制反馈的连续控制法[2]、Lyapunov函数法、最优Lyapunov配置法[3-4]和非线性反馈控制法[5]等。随着研究的深入发现,某些混沌特性可以改善系统性能,如工业搅拌领域[6]、图像加密领域[7]、深海机器人领域[9],相应混沌反控制方法[9-10]相继被提出来。文献[11]在状态变量延迟反馈控制基础上进行了转速延迟反馈和电流延迟反馈,为永磁电机的混沌反控制提供了一定参考。
基于混沌自适应非线性控制理论,建立永磁电机混沌控制模型,利用Lyapunov稳定性判据得出了闭环控制系统的稳定条件。通过自适应控制策略的设计,使永磁电机系统混沌化。仿真结果证明,当永磁电机结构参数变化时,设计的控制系统具有良好的稳定性和鲁棒性。
1 永磁电机混沌模型
调速型永磁电机主要由与电机侧连接的导体转子、与负载侧连接的永磁转子、驱动轴、输出轴以及执行器组成。其中,执行器是永磁电机的控制系统,能够接收诸如压力、水流量和液面高度等控制信号。作为执行器的组成,永磁电机是最重要的执行机构部件,是控制算法的直接载体。
假定执行器永磁体产生的磁通恒定,不考虑增磁效应和去磁效应,忽略磁路饱和,可应用迭加原理计算,运动电势系数和电感均为常数。对于二阶自治的执行器控制系统,以转速和电流作为状态变量,根据基尔霍夫定律和牛顿运动原理,其状态方程可表示为
(1)
式中,Tl为负载转矩,Ra为电枢电阻,La为电枢电感,RΩ为阻尼系数,J为负载转动惯量。
(2)
式中,ω和i为执行器的转速和电流,B为粘性摩擦系数,KT、KE为转矩系数和电势系数,J为转动惯量,L和R分别为电枢回路电感和电阻,Tl和Vin分别为永磁电机执行机构负载转矩和输入电压。式(1)能够简化为
式中,y为输出;C为式(4)的系数矩阵;D=[0 1]或者[1 0];F=[-Tl/J Vin/L]T。永磁电机执行机构实际参数如表1所示。
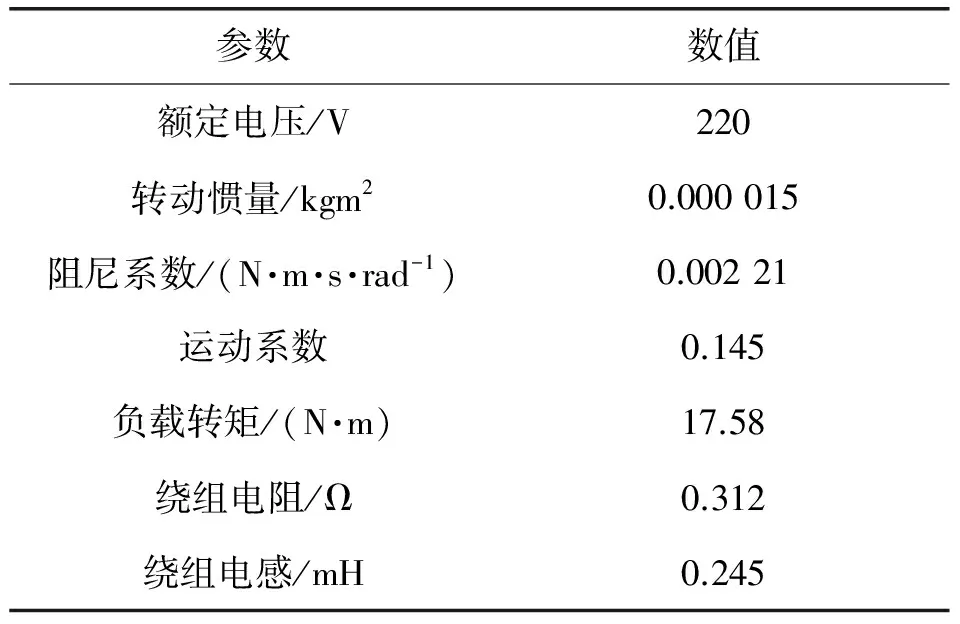
表1 永磁电机执行机构参数
2 永磁电机混沌特性分析
相空间重构是分析混沌特性的重要方法之一,能方便地从混沌时间序列中重构出与原动力学系统拓扑结构等价的相空间。
在相空间重构中,时间延迟τ和嵌入维m是2个关键参数,其准确与否直接关联吸引子特性的表征,这里采用基于C-C方法进行相空间重构。找到合适嵌入维和延时时间,构造嵌入空间的状态向量如下:
Y(j)=[y(j),y(j+τ),y(j+2τ),
…,y(j+(m-1)τ)]
(3)
式中,τ=kΔt,k=1,2,3,…,Δt为采样时间。
重构相空间轨道为
Y=[Y1Y2…Yn-1Yn]T
(4)
式中,n=N-(m-1),N为采样总数。在n个点中任选1个点Yi,其余n-1个点与Yi的距离为
rij=d(Yi,Yj)=|Yi-Yj|
(5)
所有Yi可类似求取距离集合,则关联积分函数可表示为
(6)
式中,n为相空间嵌入点数,H(r)为Heaviside阶跃函数。
T(m,r)=C(m,r)-Cm(m,r)
(7)
此函数用于统计非线性时间序列的关联度,寻求最优的τ和m。
在相空间中,找出K个与Yt最邻近相点进行拟合,基于局部线性模型,可以把式(4)化简为
(8)

根据最小二乘法:
(9)

相空间重构后,可定量分析系统混沌特性。系统Lyapunov指数表示相空间中邻近轨道发散率的定量化指数,Lyapunov指数大于0,即可判定系统处于混沌状态。

(10)

(11)
在实际运行过程中,永磁电机转速和扭矩随着气隙改变而时刻变化,自身固有参数(如粘性摩擦系数等)发生变化,系统动力学方程不再恒定。此时应选取相空间基准轨道初始点为{y(t0),y(t0+τ),…,y(t0+[m-1]τ},初始点邻域最近点距其距离表示为φ0(x0)=I。多次迭代后为防止溢出,选择基准轨道上演化点距离和对应点前后数据点向量夹角足够小的数据点替代原数据点,则系统最大Lyapunov指数可采用下式计算:
(12)
式中,M为替代的总步数。
3 自适应控制系统设计
永磁电机动态过程中动力学方程不恒定,普通方法(如延迟法)不能得到良好的控制性能,故采用自适应法对其进行混沌反控制。通过设置控制器,使受控系统跟踪混沌系统,以达到混沌反控制目的,控制器通过附加自适应律,能在永磁电机参数改变情况下自动修正控制器的固有参数,使反控制更加稳定。
跟踪的混沌系统为Duffing系统,为保证动力学性能,现将Duffing振子的中心点平移至永磁电机运行稳态点,近似为(iaN,ΩN),iaN为稳态运行时执行器电流,ΩN为稳态运行时永磁电机转速。平移后的Duffing系统方程为
(13)
按照跟踪法原理,误差设为e=y-x,误差表示如下:
(14)
构造控制律为
(15)
式中,a11=Ra/La, a12=km/La,a21=km/J,a22=RΩ/J。
将式(15)带入式(14),得
(16)
取Lyapunov函数为
(17)
V沿误差系统轨线对时间的导数为
(18)
永磁电机系统自适应律为
(19)
式中,λ≥0。将自适应律(19)带入式(17)可得
(20)
4 系统仿真
基于以上理论,使用SIMULINK软件搭建永磁电机混沌控制模型进行系统仿真。首先设定永磁电机运行时参数无变化,截取其运行在200s以内的转子电流波形、转速波形和转子电流-转速相空间轨迹。仿真结果如图1、图2、图3所示。
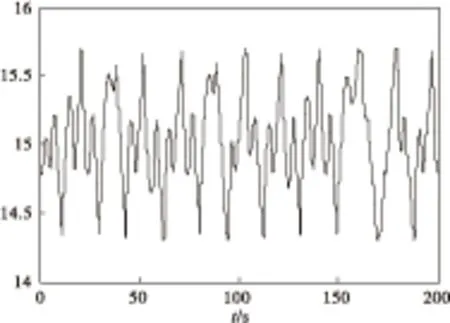
图1 参数不变时执行器电流波形
从仿真结果可看出,永磁电机执行器转子电流和转速呈现混沌态波动,相空间轨迹与Duffing混沌吸引子相似,由公式(15)得到系统最大Lyapunov指数为0.652,说明系统处于混沌状态。
为验证自适应算法的有效性,在永磁电机运行至90 s时改变其固有参数,对系统的仿真结果如图4、图5、图6所示。

图2 参数不变时转速波形

图3 参数不变时系统相空间轨迹
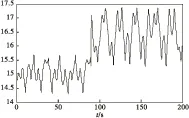
图4 参数发生变化时的转子电流波形
可以看出,永磁电机执行器电流、转速和相轨迹短时进入稳定状态,体现很强的鲁棒性,经计算此时系统最大Lyapunov指数为0.814。
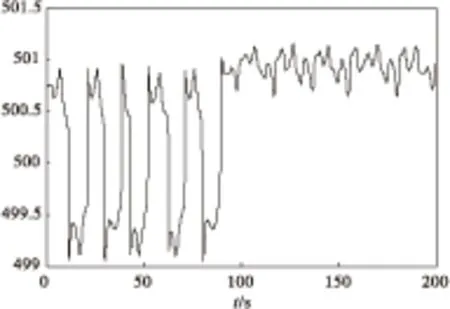
图5 参数发生变化下电机转速波形

图6 参数变化下转子系统相空间轨迹
5 结 语
建立了永磁电机物理模型和数学模型,基于现代非线性理论,给出了求解最大李雅普诺夫数值的理论推导。以Duffing系统作为目标系统,按照跟踪法原理设计了控制系统,并构造了自适应率,使得永磁电机执行器转速和电流产生混沌震荡且幅值可控。对混沌反控制的永磁电机系统,进行了理论分析和推导,给出了动力学方程式和混沌解析表达式。通过系统仿真,验证了理论推导的正确性。给出了周期和混沌状态下的永磁电机执行机构转速波形与相空间重构的相轨迹,该轨迹表明系统具
有较好的控制性能。系统最大李雅普诺夫值为正,同时验证了系统的混沌运动。
[1]Ott E,Grebogi C,Yorke J A.Controlling chaos[J].Physical Review Letters,1990,64(11) :1196-1199.
[2]Pyragas K.Continuous control of chaos by self-controlling feedback[J].Physics Letters A,1992,170(6) :421-428.
[3]Zribi M,Oteafy A,Smaoui N.Controlling chaos in the permanent magnet synchronous motor[J].Chaos Solitons & Fractals,2009,41(3): 1266-1276.
[4]Ataei M,Kiyoumarsi A,Ghorbani B.Control of chaos in permanent magnet synchronous motor by using optimal Lyapunov exponents placement[J].Phyaics Letters A,2010,374(11): 4226-4230.
[5]Ren H,Liu D.Nonlinear feedback control of chaos in permanent-magnet synchronous motor[J].IEEE Transactions on Circuits and SystemsⅡ:Express Briefs,2006,53(1): 45-50.
[6]Chau K,Ye T,Gao S Y.Application of chaotic-motion motors to industrial mixing processes[C]//39th IAS Annual Meeting,Conference Record of the 2004 IEEE,Seattle,USA,2004.
[7]郑 凡,田小建,范文华.基于Henon映射的数字图像加密[J].北京邮电大学学报,2008,31(1):66-70.
[8]安跃军,孙昌志,燕奎臣.深海机器人推进电机系统的混沌控制[J].沈阳工业大学学报,2006,28(5):526-529.
[9]关新平,范正平,张群亮.连续时间稳定线性系统的混沌反控制研究[J].物理学报,2002,51(10):2216-2220.
[10]孟昭军,孙昌志,安跃军.基于时间延迟状态反馈精确线性化的PMSM混沌反控制[J].电工技术学报,2007,22(3):27-31.
[11]李 俊,陈基和,邹国棠.永磁直流电机的混沌反控制[J].中国电机工程学报,2006,26(8):77-81.
[12]杨绍清,章新华,赵长安.一种最大李雅普诺夫指数估计的稳健算法[J].物理学报,2000,49(4):636-640.
[13]赵全文,于金飞,于金鹏,等.基于观测器的异步电动机模糊自适应控制[J].渤海大学学报:自然科学版,2015,36(1):37-43.
[14]沈德海,侯 建,鄂 旭,等.一种抑制高斯噪声的加权滤波算法[J].渤海大学学报:自然科学版,2016,35(4):356-360.
(责任编辑 佟金锴 校对 张 凯)
Chaos Anti-control Research of Permanent Magnetic Motor Based on Adaptive Method
LI Chen1,CHEN Wan2,SHANG Zhi-jian3
(1.State Grid Shenyang Power Supply Company,Shenyang 110003; 2.Bureau of Quality Supervision, Dalian Huayuankou Economic Area Administration of urban and rural construction,Dalian 116422; 3.Maintenance Branch,State Power Network Liaoning Electric Power Co.,Ltd.Shenyang 110136,Liaoning Province)
Based on chaotic nonlinear control theory,the physical model and the second-order autonomous mathematical model for permanent magnetic driver (PMD) were established.Using the C-C method to reconstruct the phase space,embedding dimension and delay time was obtained accurately and the calculation method of maximum Lyapunov index was given for chaotic PMD system.The thought of adopting chaos self-adaptive method was put forward to control PMD system,taking the duffing system as tracking object while the adaptive controller system was designed.By SIMULINK modeling simulation,maximum Lyapunov indexes were 0.655 and 0.814,when dynamics equation of PMD was under steady state and parameter changing.And chaotic attractor was into a stable state rapidly after parameter changing,having a good resistance to interference.The works provide a theoretical basis for control system design of PMD.
permanent magnetic driver; Lyapunov index; chaos anti-control; adaptive method
2017-01-10
国家自然科学基金项目(61371200); 辽宁省教育厅项目( L2015366,L2015367)
李 忱(1988-),男,辽宁新宾人,助理工程师。
10.13888/j.cnki.jsie(ns).2017.02.009
TM154
A
1673-1603(2017)02-0137-06
猜你喜欢
上海大中型电机(2021年2期)2021-07-21
防爆电机(2020年6期)2020-12-14
测控技术(2018年12期)2018-11-25
制造技术与机床(2017年9期)2017-11-27
浙江大学学报(理学版)(2016年1期)2016-05-14
自动化学报(2016年8期)2016-04-16
自动化学报(2016年5期)2016-04-16
电测与仪表(2015年14期)2015-04-09
电测与仪表(2014年24期)2014-04-09
组合机床与自动化加工技术(2014年12期)2014-03-01