
基于双Boost交联拓扑的三相功率因数校正器
2017-05-21 04:23吴佳毅虞海泓杜锦佩
电力自动化设备 2017年10期
陈 骞 ,陆 翌 ,裘 鹏 ,吴佳毅 ,虞海泓 ,杜锦佩
(1.国网浙江省电力公司电力科学研究院,浙江 杭州 310014;2.国网浙江省电力公司,浙江 杭州 310007;3.浙江大学 求是学院,浙江 杭州 310058)
0 引言
三相不控整流因其电路结构简单、可靠而广泛应用于中大功率场合。但是由于三相不控整流的非线性,向电网注入大量的谐波电流。谐波电流的出现会对公用电网产生污染,它使用电设备所处的环境恶化,也给周围的通信系统和公用电网以外的设备带来危害。因此,减小谐波电流、提高功率因数是整流器的2个重要目标。
减小谐波电流、提高功率因数的方法主要分为无源和有源两大类。无源方法的结构简单,文献[1-2]提出近正弦输入电流三相整流器的概念,这类整流器利用外加电感、电容使输入电流近正弦。但若要达到理想的总谐波畸变率(THD)和功率因数,所需要的滤波电感、滤波电容值非常大,实际中无法实现;并且滤波电感、滤波电容值与负载一一对应,因此只适用于负载变化很小的场合。文献[3-5]采用的多脉波整流技术具有无需控制系统、降低设备成本、提高效率等优点,但是网侧电流谐波含量仍然较高。有源方法包括脉宽调制(PWM)整流器和加入有源功率因数校正器,其原理是改进变流器自身性能,与无源方法相比,有源方法更积极[6-12]。PWM整流器成本高,且开关损耗大,在大功率场合缺点尤为明显。目前三相有源功率因数校正技术远不如单相有源功率因数校正技术成熟,已成为中外学者研究的重点。有学者提出一种三相电源并联前馈补偿式功率因数校正电路,这类整流器通过外加并联功率因数校正电路使得输入电流近正弦、控制方便、电路简洁[13-15],但对于其工作原理、控制方案设计有待进一步深入研究。
本文在此基础上对后级拓扑进行优化,对12段工作区间的工作模式进行分析并建立理论模型。同时提出了一种针对该拓扑的控制方案并深入讨论了该整流器在该控制方案下的工作特性。最后搭建仿真、实验模型,将仿真、实验结果与理论模型的结果比较,验证控制方案的正确性。
1 拓扑及工况分析
本文研究的基于双Boost交联拓扑的三相功率因数校正器如图1所示。该拓扑由主支路和从支路两部分并联而成,主支路为三相不控整流电路,从支路为双 Boost功率因数校正电路,Sa、Sb、Sc3 个双向开关在某一时刻导通其中 2 个。图1(a)中,iam、ibm、icm分别为主支路 a、b、c 三相电流;iaA、ibA、icA分别为从支路 a、b、c 三相电流;ia、ib、ic分别为 a、b、c 三相主从支路的合路电流;ir为从整流器输出电流;im为主支路直流侧电流;is为从支路双Boost交联变换器输出电流;负载电流io=im+is;uA为从整流器输出电压;um为主整流器输出电压;uo为总输出电压。
图1(b)为从支路中的双 Boost交联拓扑结构[16],它由2个对称的Boost变换器在输入端并联且在输出端串联而成。支路1、2的输入电压为uA,每个支路独立运行,不相互影响,支路1的输出电压为u32,支路2的输出电压为u14。若K1的占空比为D1,K2的占空比为D2,那么:

因此输出电压为:

图1 基于双Boost交联拓扑的三相功率因数校正器Fig.1 Three-phase power factor corrector based on cross-linked bi-Boost topology

其中③处的电位,④处电位。
若D1=D2=D,那么输出电压为:

与普通的Boost电路相比,双Boost交联拓扑的输出电压可调范围高于普通拓扑,电流应力没有增加,IGBT与二极管的电压应力均为,是输出电压的。由此可见新拓扑具有更大的输出电压调节范围,却并没有增大器件的电压、电流应力。另外双Boost交联拓扑的2路Boost可独立控制,从而实现对从整流器直流侧正、负端电流的分别控制,抑制环流的产生。根据以上分析可知,双Boost交联拓扑非常适合本文新型三相功率因数校正器拓扑。
将一个工频周期分成12段工作区间,每段对应的Sa、Sb、Sc3个双向开关的时序,主从回路的导通相、网侧三相电流ia、ib、ic的表达式如图2所示。从图2中可以发现拓扑正常工作时,任何时刻主整流器的导通相为同极性的两相中绝对值较大相以及与其相反的相,从整流器的导通相为同极性的两相中绝对值较小相以及与其相反的相。以阶段为例,此时主整流器b、c相导通,从整流器通过控制双向开关 Sa、Sc,使得 a、c 相导通。

图2 基于双Boost交联拓扑的三相功率因数校正器的工作时序图Fig.2 Working sequence of three-phase power factor corrector based on cross-linked bi-Boost topology
三相不控整流的a相电流ia波形如图3所示。从波形上来看,引起ia失真的主要原因是阶段波形的缺失,因此如果能补上这3段的电流波形,ia的谐波含量将极大程度地减小。图1中对于a相而言,从支路的作用就是通过对Boost电路的控制补偿每个工频周期内ia在阶段的缺失波形,并且改善阶段的波形,以减小网侧电流谐波,b、c相的情况与a相一致。

图3 三相不控整流相电流波形及频谱Fig.3 Waveform and spectrum of phase current of three-phase diode bridge rectifier
根据以上的分析可得从整流器输出电流ir、从整流器输出电压uA如图4所示。其中ir与各段补偿相的电压相位一致,例如在阶段,ir与相电压 ua的相位一致。
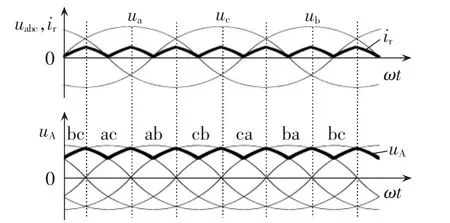
图4 ir、uA 的理想波形Fig.4 Ideal waveforms of irand uA
2 网侧电流的谐波分析
令负载为恒功率负载(一般是DC-DC变换器),相电压峰值为U,输出功率为P,对网侧电流进行谐波分析。
三相输入电压为:
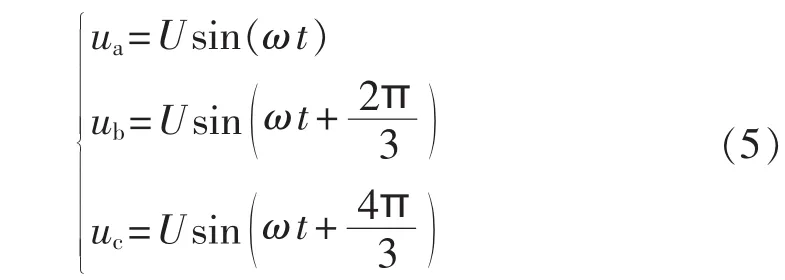
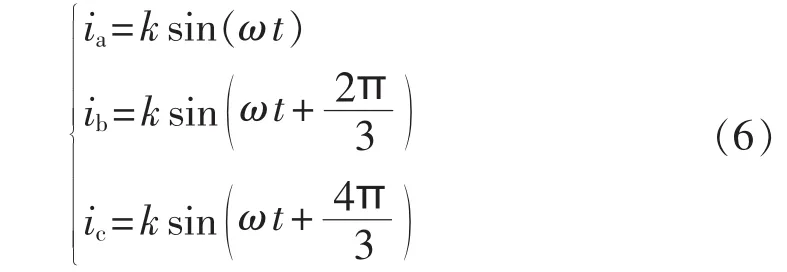
若功率因数为1,那么三相输入电流为:
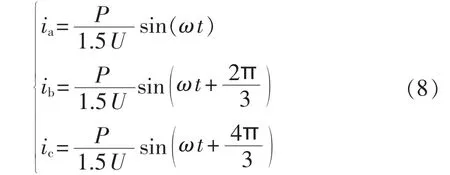
整流器的输出功率为:

因此可得三相电流的表达式为:
不计电容Cm、CA并且双Boost交联变换器的工作频率无穷大时,从整流器的输出电压可以近似为6脉波电压。由于ir的周期为工频周期的1/6,因此在上述前提下仅对阶段的电流进行谐波分析,该区间的主从支路网侧电流流通图如图5所示。网侧电流的正方向如图1中箭头所示。

图5 (0,π/3)区间主从支路网侧电流流通图Fig.5 Relationship of phase current during interval (0,π/3)
a.(0,π/6)阶段。
主整流器b、c相工作,从整流器a、c相工作。此时输出电压,a 相电压 ua=。
为保持(0,π/6)阶段电流连续,有:

根据功率守恒的原则将ir转换为Boost输出电流is。
b.(π/6,π/3) 阶段。
主整流器a、c相工作,从整流器b、c相工作。此时输出电压,a 相电压 ua=。
为保持(π/6,π/3)阶段电流连续,有:

根据瞬时功率守恒的原则可以将ir转换为Boost输出电流 is。
剩余区间网侧电流的推导结果同上,由以上推导结果可见负载为恒功率负载,不计电容Cm、CA且IGBT 开关频率无穷大时,ia、ib、ic均为纯正弦。
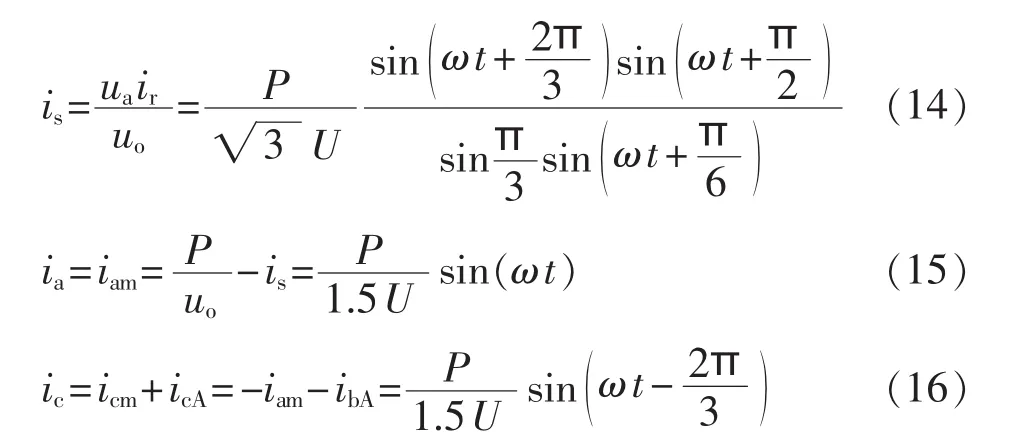
实际上Boost电路的工作频率不可能无穷大,因此需要使用滤波电容,考虑滤波电容CA、Cm时,a相电流可以表示如下:
由上式可知:考虑滤波电容CA、Cm时,网侧电流谐波含量与总功率P、相电压峰值U、角频率ω、电容Cm、电容 CA有关。
3 控制系统工作原理
3.1 基于双Boost交联拓扑的三相功率因数校正器控制系统框图
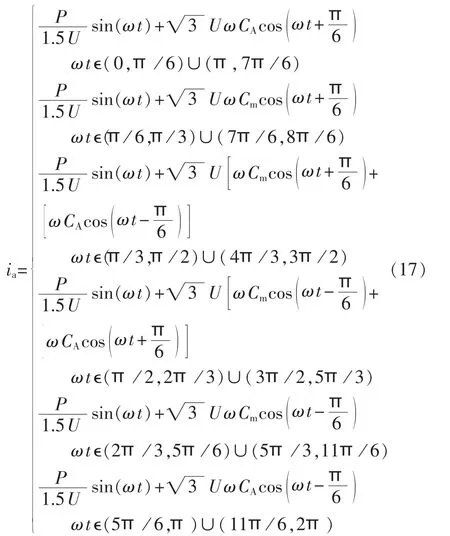
基于双Boost交联拓扑的三相功率因数校正器仅需控制从支路的双向开关 Sa、Sb、Sc以及 K1、K2即可。其控制系统框图如图6所示。控制系统通过检测三相电压、双Boost交联变换器输入输出电流(ir+、ir-、is1、is2),追踪相位基准信号 ir(wave)和幅值基准信号 is(ref)并由此合成电流环的基准信号ir(ref),实现对is1、is2的平均值控制以及ir+、ir-的波形控制,从而提高功率因数,减小网侧电流谐波含量。
其中Sa、Sb、Sc在一个工频周期内的时序关系已在图2中列出,只需检测网侧电压相位即可确定各时刻 Sa、Sb、Sc的导通状态。K1、K2的控制与传统有源功率因数校正器的控制相似。常用的控制AC-DC开关变换器的实现方法基本上有3种:电流峰值控制、电流滞环控制以及平均电流控制。由于电流滞环控制方法具有控制方法简单、电流动态响应快、抑制负载扰动能力强、鲁棒性好等优点,本系统采用滞环控制。滞环控制框图如图7所示。K1、K2的控制互相独立,其中K1取ir+、is1的滤波值作为电流反馈,而K2则取 ir-、is2的滤波值作为电流反馈,但 K1、K2均取ir(wave)作为相位基准信号。通过对 K1、K2进行独立控制,实现了对ir+、ir-的控制,保证了从整流器正端流出的电流全部流回负端,避免环流的产生。
图7 滞环控制框图Fig.7 Block diagram of hysteresis control
3.2 电感电流控制策略
根据第2节中的公式推导过程可知基于双Boost交联拓扑的三相功率因数校正器的控制需要注意以下2点:控制恒功率负载(DC-DC变换器),使其工作于恒功率状态;补偿每相过零前后π/6相位区间的缺失电流,以(0,π/6)阶段为例,此阶段需使ir+=ir-=Psin(ωt) /(1.5U)。
本系统中负载电流由主支路和从支路共同提供,其中主支路为三相不控整流,可以看成电压源,而从支路根据电流控制的原理可以看成电流源。系统的输出电压等于电压源的输出电压,即6脉波电压,若负载功率一定,则总输出电流io固定。通过控制从支路的输出电流is以及Boost输入电流ir实现对每相过零前后π/6相位区间缺失电流的补偿。
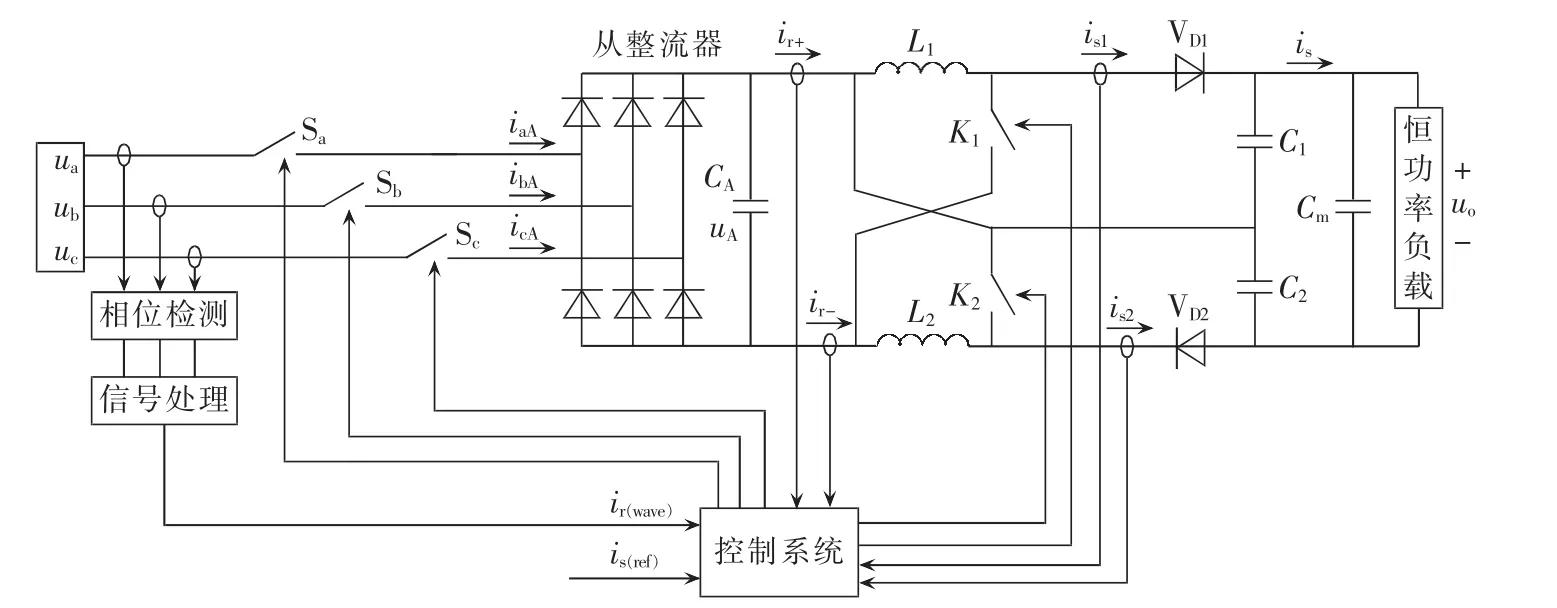
图6 基于双Boost交联拓扑的三相功率因数校正器系统控制框图Fig.6 Control block diagram of three-phase power factor corrector system based on cross-linked bi-Boost topology
从支路的功率为:

由于系统的总输出功率为P,因此主支路的输出功率为:

根据式(18)、(19)可得:

由以上分析可得:系统只要满足式(20),并且ir能够跟踪ir(wave)的相位即可实现网侧电流谐波的优化控制。
图7的控制框图就是在以上分析的基础上搭建的。通过检测电压相位并进行信号处理即可确定ir(wave),其中相位基准信号 ir(wave)与相电压相位的关系如图4所示。is(ref)为电流外环的给定,由于需要满足式(20),因此 is(ref)=28 Im/97。电流外环经过 PI调节后的输出与ir(wave)的乘积作为双Boost交联变换器输入电流的给定信号 ir(ref),对双 Boost交联变换器输入电流ir进行控制。电流滞环跟踪原理如图8所示,图中T为控制周期,Δi为滞环控制的环宽,滞环上、下限分别为 ir(ref)+Δh、ir(ref)-Δh。当 ir> ir(ref)+Δh 时,开关管关断,ir下降;当 ir<ir(ref)-Δh 时,开关管导通,ir上升。正是通过对开关管的开通、关断时间的调节使得 ir在给定信号ir(ref)附近呈锯齿状波动,实现了跟踪的目的。Δh的大小影响ir的波动,进而影响网侧电流的谐波,因此选择合适的Δh对于控制系统而言非常重要。为改善K1、K2的开关特性,需要对电流采样值进行滤波处理。
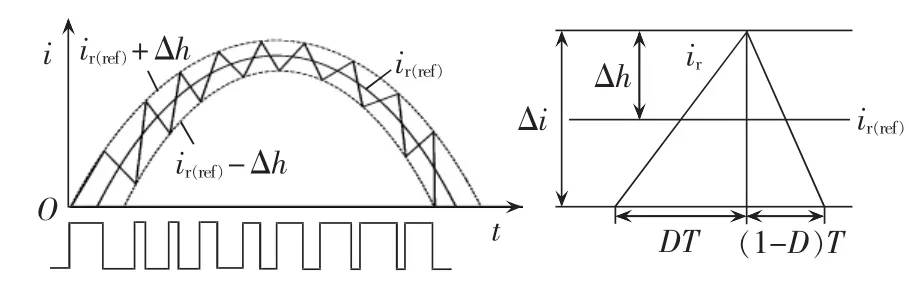
图8 滞环控制原理Fig.8 Principle of hysteresis control
4 电路参数的设计
系统已确定参数如下:三相输入相电压有效值为220 V,输出电压为514.6 V,输出功率为30 kW,输出电流为57.18 A,从支路电流有效值为12.8 A。
4.1 开关管最大开关频率的确定
根据图8可得,开关管关断时,有:

开关管导通时,有:
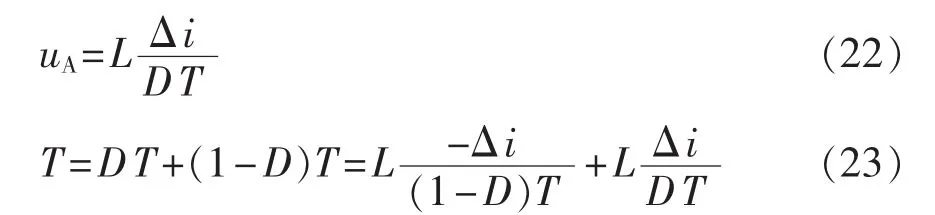
因此可得开关管的开关频率为:

从式(24)可知,滞环控制时开关频率与电感L、环宽Δh、输出电压uo有关,由于输出电压变化,因此滞环控制的开关频率也是变化的。根据系统的功率等级确定开关管的最大工作频率为20 kHz,根据工作频率继而确定电感以及环宽的值。将前6个阶段对应不同的uA、uo代入式(24),绘制一个工频周期内的开关频率分布图,如图9所示。
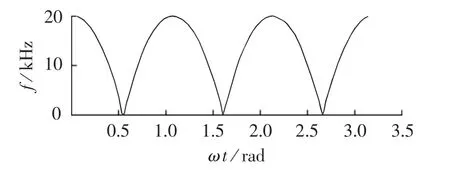
图9 开关频率f在一个周期内的变化曲线Fig.9 f-t curve during a period
4.2 连续模式下Boost升压电路电感L的设计
电感的设计步骤如下。
a.确定输出电压uo。
输出电压。
b.确定最大输入电流Iimax。
电感应当在最大电流时避免饱和。最大输入电流发生在输入电压最低且输出功率最大时。

其中,从支路输出功率Ps=uois;最低输入电压有效值uimin=0.8 uin;η 为 Boost变换器效率。
令η=0.9,根据已确定的系统参数可得Ps=6 591W,uimin=304.84 V,最大输入电流有效值Iimax=24 A。
c.确定开关频率f。
4.1节中已确定开关频率f=20 kHz。
d.确定最大占空比Dmax。
根据连续模式Boost变换器输出电压uo与输入电压uin关系为uo=uin/(1-D),可得最大占空比为:

根据已确定的系统参数可得最大占空比Dmax=0.162。
e.确定需要的电感量L。
为了保证电流连续,Boost电感应当大于。其中,,k=0.15~0.2。
根据已确定的系统参数可得L=0.5 mH。
4.3 输出电容Cm、CA的设计
为了使输出电压稳定,不受负载波动的影响,需要选择合适的支撑电容。影响支撑电容器的选择因素有:开关频率的纹波电流、二次谐波的纹波电流、直流输出电压、输出纹波电压和维持时间。流过输出电容器的总电流是开关频率纹波电流的均方根值(有效值)和线路电流的二次谐波的叠加。
输出电容Cm可由下式计算得到:

其中,uripple为纹波电压的峰峰值;fn为交流输入频率50 Hz。
根据系统已确定参数,同时考虑输出电容的大小对于网侧电流谐波的影响,可得输出电容Cm=40 μF。对考虑电容Cm、CA时的a相电流分段表达式进行傅里叶分解可得THD与Cm/CA的关系曲线如图10所示。从图10中可以看出,当Cm/CA=2时,a相电流的THD最小,为4.65%。因此可取得从支路直流侧电容 CA=20 μF。
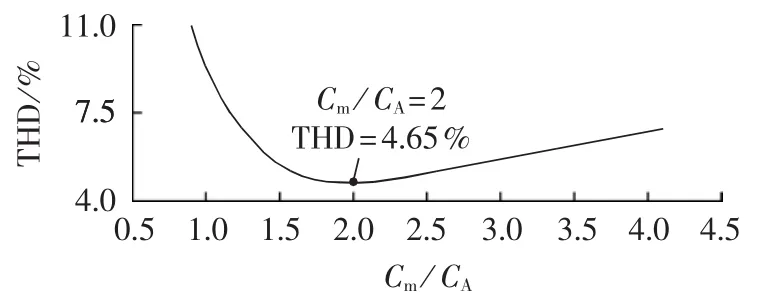
图10 THD与Cm/CA的关系Fig.10 Relationship between THD and Cm/CA
5 仿真验证
使用MATLAB软件对图1所示电路进行仿真验证。主电路参数如第4节所述,控制电路参数设置如下:电流外环的比例参数Kp=0.015,积分参数Ki=5;相位控制比例系数K=0.1;滞环宽度Δh=3。
普通三相不控整流的a相电流频谱见图11(a),由理论模型得到的a相电流频谱见11(b),由仿真模型得到的a相电流频谱见11(c),网侧接入截止频率为5 kHz的滤波器后,a相电流频谱见11(d)。从频谱上看,由理论模型得到的a相电流THD为4.65%,由仿真模型得到的a相电流THD为10.84%,相比于普通的三相不控整流电路,THD明显减小。由仿真模型得到的a相电流THD大于由理论模型得到的a相电流THD,这是因为理论模型中is、im为连续值,而仿真模型中is、im为脉冲电流,因此实际运行时网侧电流会产生较大的脉动,从而产生额外的高次谐波。网侧接入截止频率为5 kHz的滤波器滤除高次谐波后,a相电流THD仅为5.86%。

图11 a相电流ia及频谱Fig.11 Waveform and spectrum of ia

图12 a相主从支路电流及三相合成电流波形Fig.12 Waveforms of iaA,iam,ia,iband ic
图12 为 iaA、iam、ia的波形和三相合成电流 ia、ib、ic的波形。其中iaA实现了a相电流在过零前后π/6相位区间缺失电流的补偿,iaA、iam叠加得到ia。
图13为Boost输入电压和输出电压波形。Boost输入电压uA波形与图4中理论分析的结果一致,输出电压uo的波形即为不控整流输出的6脉波电压波形。图14为Boost输入电流ir+、ir-的波形,其与图4中理论分析的结果一致。可以看出ir+、ir-实现了对每相过零前后π/6相位区间缺失电流的补偿,并使得补偿电流与对应相电压同相位。图15为a相电压与a相电流波形,功率因数为0.9932,可见基于双Boost交联拓扑的三相功率因数校正器采用滞环控制能够很好地实现功率因数校正。图16为输出功率曲线,控制系统能使输出功率维持恒定,满足该拓扑的适用条件。
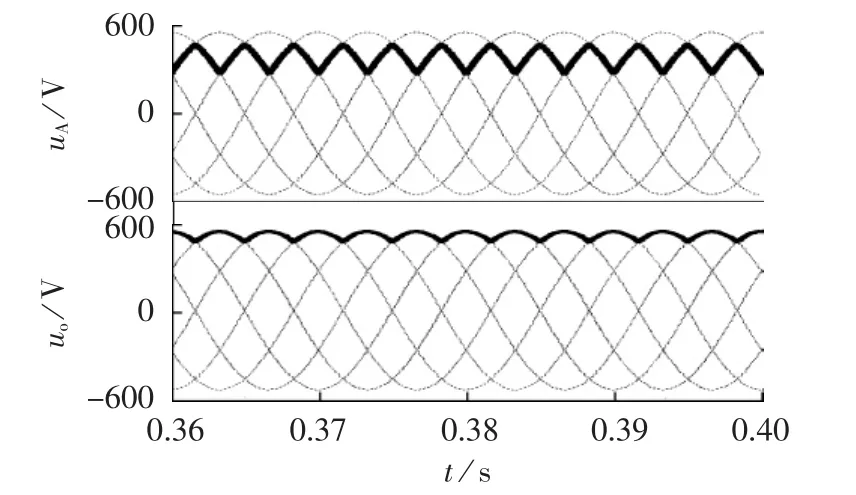
图13 Boost输入电压uA和输出电压uo波形Fig.13 Waveforms of uAand uo

图14 Boost输入电流波形Fig.14 Waveforms of input current of Boost circuit

图15 a相电压与a相电流Fig.15 Waveforms of uaand ia
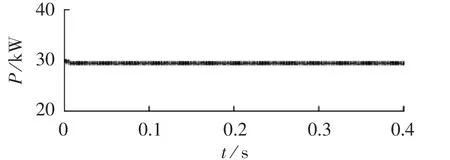
图16 输出功率曲线Fig.16 Curve of output power
6 实验结果
搭建实验平台,验证理论分析的正确性。采用SiC器件以提高效率。图17为普通三相不控整流和基于双Boost交联拓扑的功率因数校正器的输入a相电流的实验波形,其THD分别为33%和6.6%,可见基于双Boost交联拓扑的三相功率因数校正器可以明显改善网侧电流的质量。
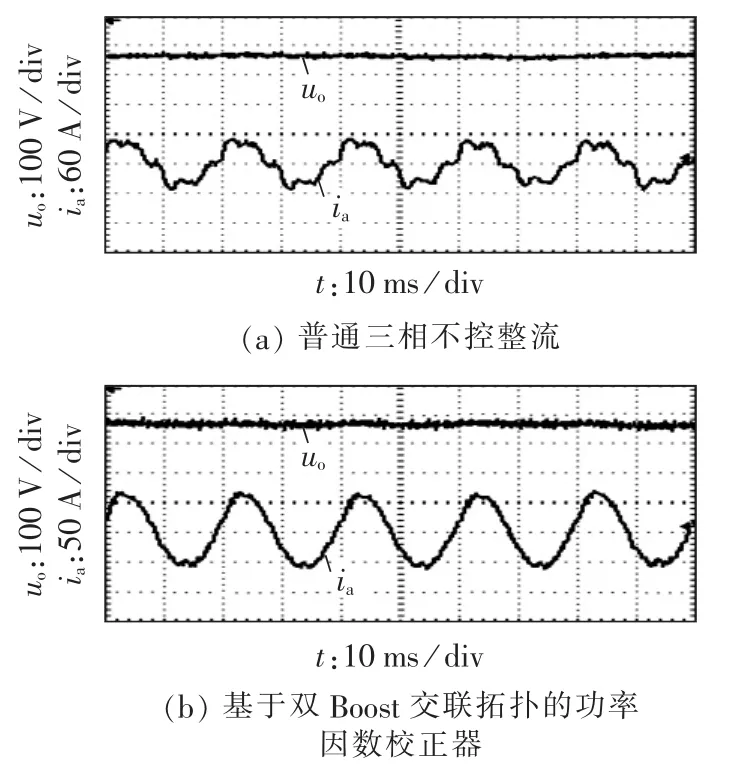
图17 a相电流ia的实验波形Fig.17 Experimental waveform of ia
7 结论
本文研究的基于双Boost交联拓扑的三相功率因数校正器,配合滞环控制技术能够得到稳定的6脉波直流输出电压,补偿每相过零前后π/6相位区间的缺失电流,并改善该工作区间内的其余两相的电流波形。理论分析和仿真、实验结果证明该拓扑具有网侧电流THD小、功率因数高的优点。但负载功率变化较大时,该拓扑的功率因数、网侧电流THD会变差且其直流侧电压不可调控。该拓扑只有约1/5的功率经过Boost电路,所以只需选择较低功率等级的器件,极大限度地降低了成本,提高了整机效率,可用于对功率因数要求较高且负载功率变化较小的场合,具有广阔的应用前景。
参考文献:
[1]陈仲,朱银玉,罗颖鹏.基于交流侧LC滤波的进正弦输入电流三相整流器[J].电工技术学报,2009,24(11):108-113.CHEN Zhong,ZHU Yinyu,LUO Yingpeng.Three-phase rectifier with near-sinusoidal input currents and LC filters connected on the AC side[J].Transactions of China Electrotechnical Society,2009,24(11):108-113.
[2]陈仲,朱银玉,邱岩,等.近正弦输入电流三相整流器的分析和参数设计[J].中国电机工程学报,2009,29(36):29-34.CHEN Zhong,ZHU Yinyu,QIU Yan,et al.Analysis and design of three-phase rectifier with near-sinusoidal input currents[J].Proceedings of the CSEE,2009,29(36):29-34.
[3]BURGOS R P,UAN-ZO-LI A,LACAUX F,et al.Analysis of new step-up and step-down 18-pulse directasymmetric autotransformer rectifiers[C]∥IEEE Industry Applications Conference.Hong Kong,China:IEEE,2005:145-152.
[4]陈鹏,李晓帆,熊招春,等.一种带辅助电路的12脉波整流电路[J].中国电机工程学报,2006,26(23):163-166.CHEN Peng,LIXiaofan,XIONG Zhaochun,etal.A 12-pulse rectifier with an auxiliary circuit[J].Proceedings of the CSEE,2006,26(23):163-166.
[5]SINGH B,BHUVANESWARI G,GARG V.T-connected autotransformer-based 24-pulse AC-DC converter for variable frequency induction motor drives[J].IEEE Transactions on Energy Conversion,2006,21(3):663-672.
[6]王兆安,杨君,刘进军,等.谐波抑制和无功功率补偿[M].北京:机械工业出版社,2005:413-415.
[7]陈兵,谢运祥.新型三电平Buck型功率因数校正器[J].电力自动化设备,2010,30(6):71-75.CHEN Bing,XIE Yunxiang.Three-level Buck-type power factor corrector[J].Electric Power Automation Equipment,2010,30(6):71-75.
[8]刘雪山,许建平,王楠.临界连续模式单电感双输出Buck功率因数校正变换器[J].电力自动化设备,2015,35(5):64-69.LIU Xueshan,XU Jianping,WANG Nan.SIDO Buck PFC converter operating in critical continuous conduction mode [J].Electric Power Automation Equipment,2015,35(5):64-69.
[9]马红波,郑聪,余文松,等.单开关管无桥SEPIC PFC变换器[J].电力自动化设备,2014,34(4):72-77.MA Hongbo,ZHENG Cong,YU Wensong,etal.Single-switch bridgeless SEPIC PFC converter[J].Electric Power Automation Equipment,2014,34(4):72-77.
[10]张斐,许建平,舒立三,等.低输出电压纹波三态PCCM CUK PFC变换器[J].电力自动化设备,2014,34(1):80-84.ZHANG Fei,XU Jianping,SHU Lisan,etal.Tri-state PCCM CUK PFC converter with low output-voltage ripple [J].Electric Power Automation Equipment,2014,34(1):80-84.
[11]阎铁生,许建平,高建龙,等.低输出电压纹波准单级反激PFC变换器[J].电力自动化设备,2015,35(9):22-29.YAN Tiesheng,XU Jianping,GAO Jianlong,et al.Quasi singlestage flyback PFC converter with low output voltage ripple[J].Electric Power Automation Equipment,2015,35(9):22-29.
[12]蔡逢煌,王武,陈浩龙.倍压Boost-APFC变换器的改进型单周期控制[J].电力自动化设备,2015,35(10):121-126.CAI Fenghuang,WANG Wu,CHEN Haolong.Improved singlecycle control of double-voltage Boost-APFC converter[J].Electric Power Automation Equipment,2015,35(10):121-126.
[13]WANG Yufu,WANG Bingxin,ZHU Zian.A voltage-adjustable three-phase rectifier with constant power flow[C]∥Applied Power Electronics Conference and Exposition.Austin,USA:IEEE,2008:1372-1377.
[14]WANG Yufu,ZHANG Ruichen.Blocked phase current patching three-phase rectifier and motor driver with energy feedback[C]∥Applied PowerElectronicsConference and Exposition.Fort worth,USA:IEEE,2009:168-173.
[15]王玉富.三相电源并联前馈补偿式功率因数校正电路:01140014.5[P].2003-05-28.
[16]李义.采用对称交联结构的变换电路:101867314A[P].2010-10-20.
猜你喜欢
新型工业化(2021年8期)2021-10-23
电子与封装(2021年7期)2021-07-29
科学家(2021年24期)2021-04-25
测控技术(2018年9期)2018-11-25
电子制作(2016年1期)2016-11-07
通信电源技术(2016年4期)2016-04-04
通信电源技术(2016年5期)2016-03-22
电源技术(2015年1期)2015-08-22
电测与仪表(2015年12期)2015-04-09
电测与仪表(2014年21期)2014-04-04
