
基于MC9S12XS128的插剥式椰子剥衣机控制系统设计
2017-05-15 13:30张宝珍张志康江昌旭樊军庆
中国油脂 2017年3期
张宝珍,张志康,江昌旭,樊军庆
(海南大学机电工程学院,海口 570228)
应用技术
基于MC9S12XS128的插剥式椰子剥衣机控制系统设计
张宝珍,张志康,江昌旭,樊军庆
(海南大学机电工程学院,海口 570228)
针对插剥式椰子剥衣机自动化程度低的问题,基于MC9S12XS128单片机设计了椰子剥衣机的电气控制系统。该电气系统包括硬件电路和软件程序两个方面,给出了主控板电路、电源电路等部分的设计方案。在此基础上,结合剥衣机的流程给出软件程序。以MC9S12XS128单片机为核心,通过对其内部电位的控制,完成对步进电机的启停、速度、转向及运行时间的控制,最终自动完成椰子剥衣的整个过程。实验证明,该电气系统运行平稳,剥衣效果良好。该方案设计合理,自动化程度高,可以在实际生产中推广应用。
椰子;剥衣机;单片机;电气控制;步进电机
椰子在我国海南种植比较广泛,它是海南的主要经济作物[1]。我国椰子的加工企业主要分布在海南,对椰子的前期加工如椰衣的剥离等多为手工操作[2]。手工操作不但效率低、剥衣效果不理想,且存在一定的危险,影响到操作人员的人身安全。因此,需寻求自动化程度高的椰子剥衣加工方法。
目前国内外研究人员设计的椰子剥衣机有多种型式[3-5〗,如BYY型液压式剥衣机,该机利用液压传动与电气控制系统协调地进行工作,可对各种形状和尺寸的椰子进行剥衣。本文以樊军庆教授团队所设计的插剥式椰子剥衣机为背景,设计该机的电气控制系统。该电气控制系统包括硬件电路和软件程序两部分,以MC9S12XS128单片机为核心,通过对其内部电位的控制,完成对两台步进电机的启停、速度、旋转方向以及运行时间的控制,从而自动完成椰子剥衣的整个过程。其优点是能较干净地剥落椰衣,且较好地保留椰壳纤维,从而有利于后续加工与利用。
1 剥衣机的机械结构
剥衣机主要是由机架、步进电机、丝杆、刀架、刀片等组成,如图1所示。从图1可见,步进电机固定在机架上。刀架通过上丝杆与步进电机2的输出轴联接,刀片安装在刀架上,套筒通过下丝杆与步进电机1相联。

注:1.步进电机2;2.套筒;3.下丝杆;4.步进电机1;5.刀架;6.上丝杆;7.刀片;8.托盘;9.行程开关1;10.行程开关2。
图1 剥衣机机械结构图
剥衣机的工作过程:开始剥衣机处于原始位置,即各元件处于图1所示位置,待加工椰子放到托盘上,行程开关1动作,步进电机1开始运转,步进电机1带动下丝杆转动,下丝杆带着固定在套筒上的托盘中的椰子向上运动,向上运动的椰子碰到行程开关2,即刀片接触到椰子,步进电机2开始运转,步进电机2带着上丝杆一起旋转,刀架向下运动,且刀架逐渐张开,开始剥衣过程。当刀架张开一定角度后(延时时间到),步进电机1、2同时开始反转,套筒和刀架做反向运动,当套筒和刀架回到原位时步进电机1、2停转,椰子的剥衣过程结束。
2 电气控制系统总体设计
椰子自动剥衣机电气控制的总体设计如图2所示。MC9S12XS128单片机控制模块是控制中心[6],它通过接收置位的电平产生控制信号,再将此控制信号传递给电机驱动装置,步进电机的控制通过PWM脉冲来实现。步进电机驱动装置是直接控制电机运转的模块[7],步进电机驱动器是一种将电脉冲转化为角位移的执行机构,当它接收到一个脉冲信号,步进电机就被驱动而转动一个固定的角度,通过控制脉冲频率来控制电机的速度。驱动采用共阳极驱动,接线如图3所示[8]。方向+、脱机+、脉冲+都接VCC;脉冲-有脉冲时工作,高电平有效,脉冲-无脉冲时锁定电机,并自动半流;方向-高电平输入或悬空时电机正转,低电平输入时反转;脱机-高电平输入或悬空时正常工作,低电平时脱机。
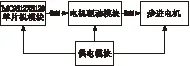
图2 电气控制框图

图3 驱动接线图
3 硬件电路的设计
剥衣机电气控制系统原理图如图4所示,主要包括电源模块、主控板电路、拨码开关电路。电机1线路连接:脉冲-接PWM1,脱机-接PT0,方向-接PT7。电机2线路连接:脉冲-接PWM3,脱机-接PM4,方向-接PM5。独立按键连接:与电机1有关线路连接,加速-接AD0,减速-接AD1;与电机2有关线路连接,加速-接AD2,减速-接AD3。模拟行程开关:PM2模拟行程开关1,PM3模拟行程开关2。延时时间调整:时间加0.5 s接AD6,时间减0.5 s接AD7。
3.1 电源模块
电源模块包括开关电源和稳压模块,开关电源为电机驱动装置和电机提供直流电。系统供电采用线性稳压芯片LM2940,该稳压芯片的纹波小,供电性能可靠,输出5 V电压为核心板和其他部分供电。
3.2 主控板电路
单片机是系统中最重要的硬件,它是系统的控制中心。MC9S12XS128属于中高档型单片机,16位,包括2个异步串行通信接口(SCI)、1个串行外设接口(SPI)、1个8通道输入捕捉/输出比较(IC/OC)定时器模块、16通道12位A/D转换器和1个8通道脉冲宽度调制模块(PWM),拥有128 kB程序Flash、8 kB 数据Flash和8 kB RAM。
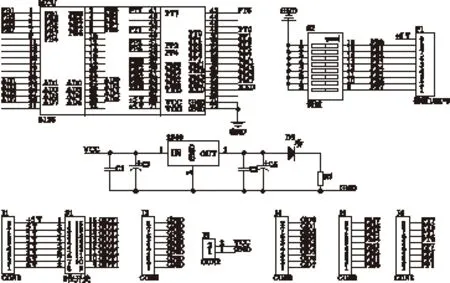
图4 剥衣机电气原理图
3.3 拨码开关
拨码开关需要外接上拉电阻。在系统中,拨码开关用来控制步进电机转向。PB0模拟总开关,PB2、PB4控制步进电机1方向,PB3、PB5控制步进电机2方向,PB1、PB6、PB7暂不使用。电机方向控制见表1~表4。

表1 步进电机方向控制1
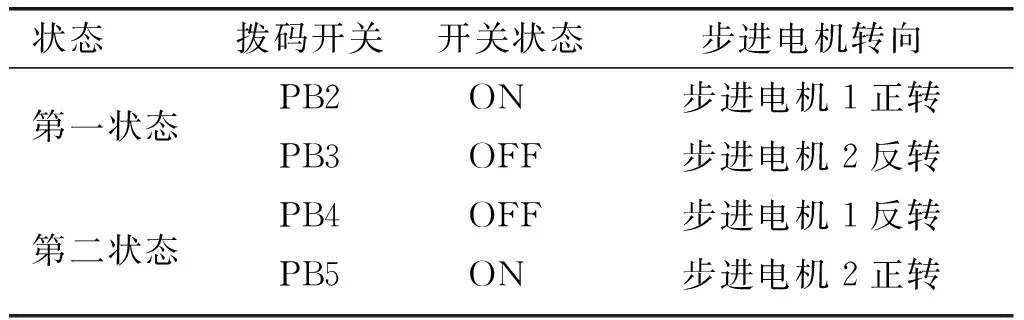
表2 步进电机方向控制2
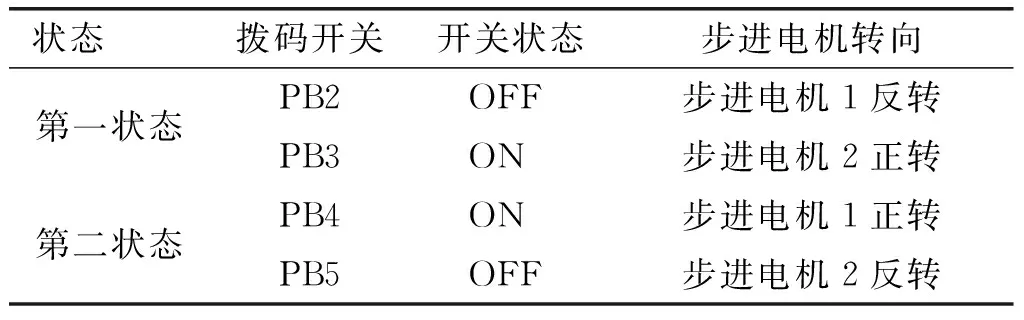
表3 步进电机方向控制3

表4 步进电机方向控制4
4 软件程序设计
4.1 系统运行流程
剥衣机电气控制系统运行流程如图5所示。在系统初始化时,设置拨码开关的位置,单片机识别拨码开关所置位的电平进而控制步进电机的运转方向。与此同时,通过独立按键对单片机对应引脚电平置位,内部系统接收电平后改变变量,完成对不同延时的时间设置。单片机接受独立按键置位的电平后改变内部程序PWM的数据,由此改变步进电机的运转速度。剥衣机初始化完成后,行程开关1动作,步进电机1开始运转,待套筒碰到行程开关2时,步进电机2开始运转(此时两台步进电机都正转运行),且此时启动延时程序,待延时时间到,步进电机1和步进电机2同时反转,两台步进电机反转一定时间后,结束一个运转周期。

图5 电气系统运行流程图
4.2 主程序
电气系统软件程序的设计采用模块化的设计思路,主程序框图如图6所示,由系统初始化、按键控制和电机运行控制模块组成,核心是控制步进电机的运转。
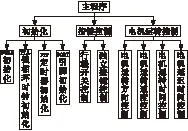
图6 主程序框图
主程序的初始化包括单片机CPU的PLL锁相环时钟、PWM、PORT引脚、PIT定时器。通过初始化完成对步进电机的速度、运转时间以及运转方向等初始值的设定。步进电机的控制包括转向、转速、运转时间及延时4个方面。电机的转向是通过控制PB口的高低电平来完成的,单片机接收来自外部的电平,其内部将产生的控制信号送到电机驱动装置,即完成电机转向的控制;电机速度的控制是通过控制PWM信号来实现,将来自外部的信号送到单片机,单片机最小系统识别外部信号,改变相应的变量来完成对PWM的改变,即完成电机速度的控制;电机运转时间的控制是通过PIT模块来实现,在系统初始化时,启动PIT模块内的4个周期性定时器,设定周期性定时器的定时周期,并设置4个变量分别计算每个定时器周期性工作的次数,通过比较4个变量的数值,使得两台电机在行程开关2动作前后运行时间相同;电机的延时由程序中设定的变量决定,系统初始化后延时被设置为3 s,单片机对应引脚在接收外部电平后,单片机最小系统通过程序增加或减少变量的值,从而实现对延时时间的改变。
5 实验验证
根据剥衣机电气系统原理图(见图4)和软件程序(见图6),搭建电气控制系统的实验装置。步进电机是整个系统的最终执行部分,由于椰子外衣硬度较大,剥掉椰衣需要较大的力矩。经过计算可知,15 N·m 的力矩已经足可以把椰衣剥开。首先,把拨码开关的第1位设置为ON状态,然后把模拟行程开关1的独立按键按下,此时,步进电机1开始正转,经过一定时间后,按下模拟行程开关2的独立按键,此时,步进电机1、2都正转,延时3 s后,步进电机1、2同时反转,反转的时间与它们正转的时间相同,最后两个电机都停止运转。如果想设置步进电机的转向,可以根据表1~表4设置拨码开关第2~5位的状态。如果想设置延时的时间,可以使用独立按键进行时间的设置,程序初始化的延时时间是3 s,延时时间的加减是以0.5 s为最小单位进行设置的。如果想设置步进电机的转速,可以使用独立按键进行步进电机的转速设置。
实验过程中,根据椰子的大小、椰子生长时间的长短(决定椰衣的薄厚和纤维的硬度)等特点,对电气控制系统的程序进行调试。程序调试完毕后,根据设计流程,顺利完成椰子的剥衣过程,剥衣效果如图7所示。从图7可以看出,剥下的椰衣纤维较完整,可满足后续加工的要求。

图7 椰子剥衣机的剥衣效果图
6 结 论
椰子剥衣机电气控制系统的设计包括各部分硬件电路和软件程序的设计,以单片机MC9S12XS128为核心,通过对单片机内部电位进行控制,完成对步进电机的启停、速度、旋转方向以及运行时间的控制,最终自动完成椰子剥衣的整个过程。实验结果表明,该电气控制系统运行平稳,生产率达5个/min,剥衣完好率达95%。该机设计方案合理、简单,制造成本低廉,且自动化程度高,可以在实际生产中推广使用。
[1] 张志强,樊军庆,王涛.椰子剥衣机的设计[J]. 食品与机械,2015,31(3):122-124.
[2] 夏秋瑜,李瑞,赵松林,等.椰子的利用价值及综合加工技术[J].中国热带农业,2007(3):37-38.
[3] 曾宪君.BYY型液压式椰子剥衣机[J].油脂科技,1984,9(S1):102.
[4] 伍湘君,樊军庆,毛舟,等.椰子剥衣机研究现状与发展趋势[J].食品与机械,2014,30(2):262-265.
[5] 肖仁鹏,马鑫,刘四新,等.椰子自动剥衣机的设计[J].食品与机械,2012,28(1):142-143.
[6] 张阳,吴晔,滕勤,等. MC9S12XS单片机原理及嵌入式系统开发[M]. 北京:电子工业出版社,2011.
[7] 刘宝志.步进电机的精确控制方法研究[D].济南:山东大学,2010.
[8] 丁伟雄, 杨定安, 宋晓光.步进电机的控制原理及其单片机控制实现[J]. 煤矿机械,2005(6):127-129.
Electrical control system design of coconut husking machine based on MC9S12XS128
ZHANG Baozhen, ZHANG Zhikang, JIANG Changxu, FAN Junqing
(Mechanical and Electrical Engineering College,Hainan University, Haikou 570228, China)
According to the problem of low-degree automation for coconut husking machine at present, the electrical auto-control system of coconut husking machine was designed based on MC9S12XS128 single-chip microcomputer. The electrical system included hardware circuit and software procedure, and the design scheme of part circuits were given, including main board circuit, power source circuit, etc. On the basis, the software procedure was given by the flow-chart of coconut husking machine operation. With MC9S12XS128 single-chip microcomputer as the core, the controls of start and stop, speed, rotation direction and operation time for stepper motors were achieved by controlling the interior electric potential of single-chip microcomputer, then the entire process of coconut husking was finished automatically. The experiment presented that the electrical control-system operated smoothly and steadily, and the husking effect was good. The design scheme was reasonable with high automation, and could be popularized and applied in practical production.
coconut; husking machine; single-chip microcomputer;electrical control; stepper motor
2016-06-29;
2016-11-27
海南省自然科学基金(20155205);海口市重点科技项目(2014027)
张宝珍(1969),女,副教授,博士,主要从事电气自动控制、电力系统安全稳定分析等研究工作(E-mail) baozhen-zh@163.com。
樊军庆,教授,硕士(E-mail)13976296032@163.com。
TS223;TP391.9
A
1003-7969(2017)03-0148-04
猜你喜欢
再生资源与循环经济(2022年4期)2023-01-06
环球市场(2021年11期)2021-01-15
设备管理与维修(2020年23期)2021-01-04
小聪仔(科普版)(2020年7期)2020-11-24
发明与创新·小学生(2020年10期)2020-10-19
小学生学习指导(低年级)(2020年6期)2020-07-25
小聪仔(科普版)(2020年7期)2020-02-01
小聪仔(科普版)(2020年7期)2020-02-01
新商务周刊(2019年24期)2019-12-22
科教新报(2019年27期)2019-09-10
