存在位置误差时运动多平台时差定位CRLB分析*
2017-05-13 02:26:40骆卉子曲长文
现代防御技术 2017年2期
骆卉子,曲长文
(海军航空工程学院 电子信息工程系,山东 烟台 264001)
存在位置误差时运动多平台时差定位CRLB分析*
骆卉子,曲长文
(海军航空工程学院 电子信息工程系,山东 烟台 264001)
存在平台位置测量误差时,已有研究未涉及运动多平台时差(TDOA)连续定位的性能评价。为此,选择克拉美-罗限(CRLB)作为对目标定位性能的评价指标,将不同时刻的运动多平台真实位置向量构成扩维向量后由CRLB定义得出了其通用计算式,并根据运动多平台TDOA连续定位的特点,推导了适合此应用场景的具体计算式。仿真结果表明了所推导的CRLB能有效用于上述场景中的定位性能评价,对近场及远场目标都需要在系统技术指标及定位算法设计等方面考虑平台位置测量误差的影响。
多平台;定位;平台位置误差;时差;克拉美-罗限;仿真
0 引言
现代战争中战场电磁环境复杂,分布着各种电磁辐射源,确定它们的位置来获取完整的战场态势对战争胜负至关重要。无源定位系统因具有隐蔽性强,定位距离远等优点,已成为定位领域的重要手段。运动多平台无源定位系统是世界各军事强国的发展重点[1-2],在众多定位体制中,时差(TDOA)体制[3]因具有定位精度高及性能稳定等优点,已在实际运动多平台系统中得到广泛使用。
对运动多平台无源定位系统而言,平台自身位置不可避免存在测量误差,该类误差对定位性能的影响如何需要进行分析,以为定位系统技术指标设计、定位算法改进及观测平台布站[4-7]提供参考。定位问题实质上是对确定性变量的估计问题,而克拉美-罗(CRLB)限[8-9]常被用作无偏估计量的估计误差下限。在TDOA定位中,文献[10]推导了单次定位中的TDOA定位CRLB,文献[11]研究了连续定位情况下的运动多平台TDOA定位CRLB,上述文献考虑只存在观测量测量误差的定位场景。文献[12-13]推导了存在观测量及观测平台位置测量误差的TDOA定位CRLB,其中,文献[13]研究的是TDOA及频差(FDOA)联合定位体制,其公式自然可直接用于TDOA定位中。文献[14]在文献[12-13]基础上增加了时间基准误差的影响。文献[12-14]推导的都是单次定位CRLB,未考虑连续定位场景,考虑平台位置误差时,TDOA连续定位CRLB并不是单次定位情况的简单推广应用,目前未见相关文献推导此类门限。
本文结合运动多平台TDOA连续定位的特点,推导了三维空间中存在平台位置测量误差时的TDOA连续定位CRLB,仿真分析了多种因素对该CRLB的影响。
1 TDOA定位方程


(1)



实际中运动多平台只能得到其位置测量值,记k时刻第i个运动平台位置测量值向量为sik,i=1,2,…,N,则
(2)


2 连续定位CRLB推导


(3)
式中:Rt=blkdiag(Rt1,Rt2,…,Rtk),Rs定义与之类似,blkdiag(·)表示分块对角矩阵。
对θ估计的CRLB定义为
(4)
经计算可得[11-13]CRLB(θ)为
(5)
式中:



CRLB(u)=X-1+X-1Y(Z-YTX-1Y)-1YTX-1.
(6)
当平台位置精确已知时,X-1即为对u估计的CRLB,位置测量误差对CRLB的影响通过式(6)等式右边第2项体系。下面根据运动多平台连续定位的特点求解式(6)。
考虑到不同时刻的TDOA观测量相互独立,对连续定位而言,可用式(7)计算X,以避免直接进行高维矩阵相乘。
(7)

(8)
J1=(ρ1,ρ1,…,ρ1)T,

由以上分析可求得
Z=Z1+Z2,
(9)

结合式(6)~(9)可得运动多平台存在平台位置测量误差时TDOA连续定位的CRLB。
3 仿真校验
假设4个运动平台采用TDOA体制对地面固定辐射源定位,初始状态如表1所示,其中,位置分量单位为m,速度分量单位为m/s,观测时间为100 s。目标位于(500, 600, 550)m及(2, 3,1)km处,分别对应近场及远场目标的情况。到达时间测量误差σi=10 ns,沿各坐标轴的位置测量误差标准差相同,且取值为10, 50, 200 m。
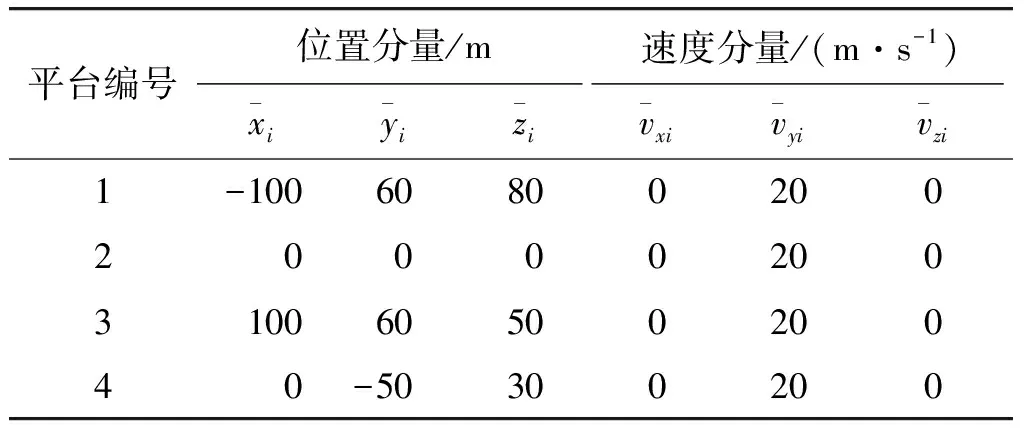
表1 各平台初始状态
位置测量误差对近场及远场目标定位CRLB的影响如图1,2所示。由图可知,随着平台位置测量误差的增大,对近场及远场目标估计的CRLB都变大,在确定定位系统指标及算法设计中都要考虑其影响。
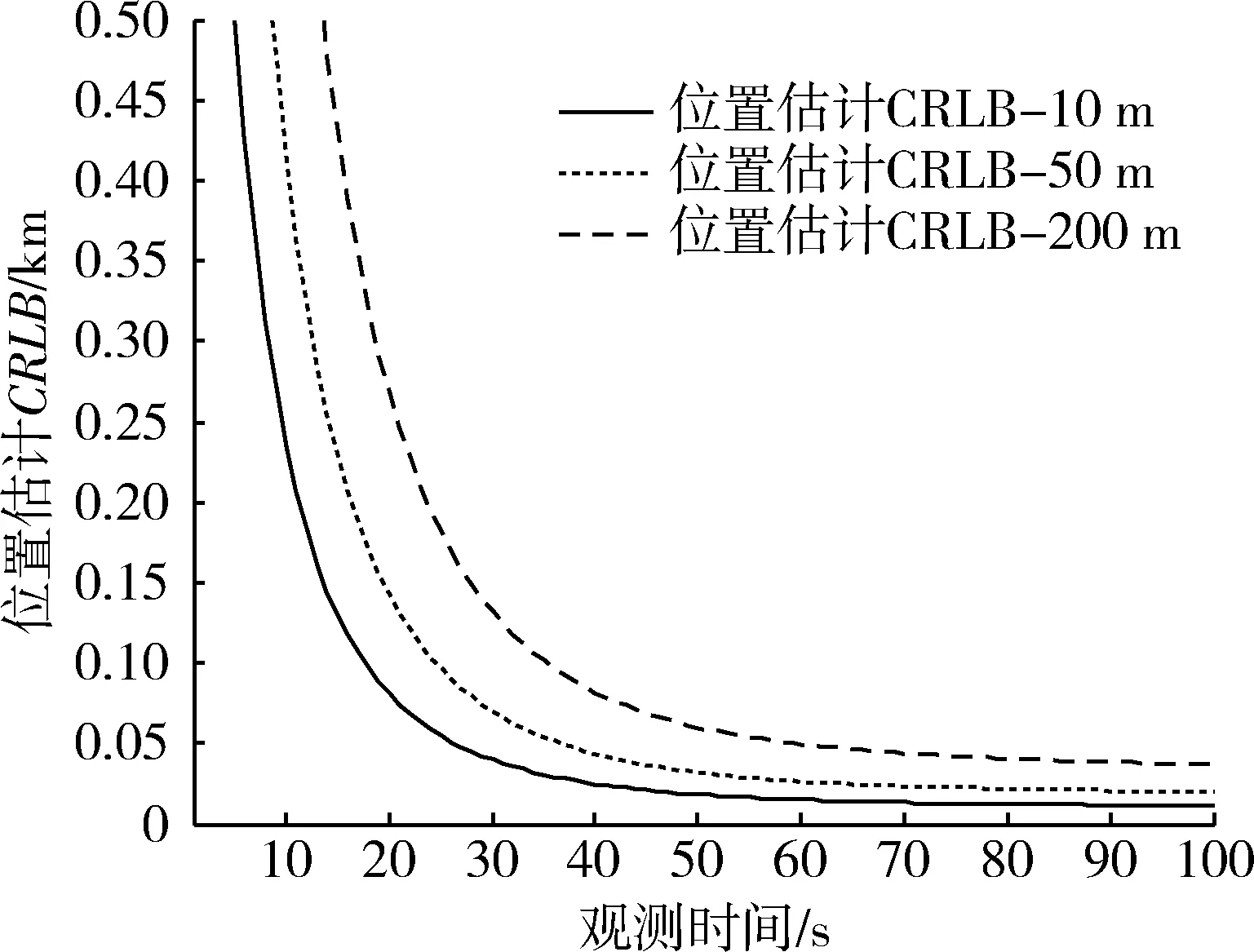
图1 平台位置测量误差对CRLB影响(近场目标)Fig.1 Effect of platform position measurement error on the CRLB (near field)
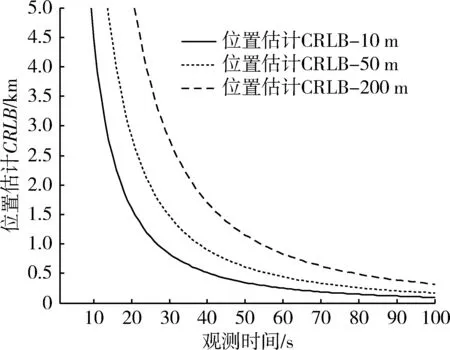
图2 平台位置测量误差对CRLB影响(远场目标)Fig.2 Effect of platform position measurement error on the CRLB (far field)
4 结束语
当存在平台位置测量误差时,需要研究该误差对运动多平台TDOA连续定位的影响。为此,选择CRLB作为评价平台位置测量误差对定位性能影响的指标,并针对运动多平台定位的特点推导了CRLB的计算式,最后通过仿真分析了平台位置测量误差对连续定位CRLB的影响。在本文仿真场景中,无论是近场目标还是远场目标,平台位置测量误差的影响都不能忽略。
[1] 闫朝阳, 费华莲. 舰载无源定位系统与技术最新进展[J]. 舰船电子对抗, 2010, 33(3):9-13. YAN Zhao-yang, FEI Hua-lian. Latest Development of Shipboard Passive Location Systems and Technologies [J]. Shipboard Electronic Countermeasure, 2010, 33(3):9-13.
[2] 郁春来, 张元发, 万方. 无源定位技术体制及装备的现状与发展趋势[J]. 空军雷达学院学报, 2012, 26(2): 79-85. YU Chun-lai, ZHANG Yuan-fa, WAN Fang. Actuality and Development Trend of Passive Location Technical System and Equipment [J]. Journal of Air Force Radar Academy, 2012, 26(2): 79-85.
[3] LIANG Q L, ZHANG B J, ZHAO C L, et al. TDOA for Passive Localization: Underwater Versus Terrestrial Environment[J]. IEEE Transactions on Parallel and Distributed Systems. 2013, 24(10): 2100-2108.
[4] 朱伟强, 黄培康, 束锋,等. 多星TDOA和FDOA联合定位精度分析[J]. 系统工程与电子技术, 2009, 31(12):2797-2800. ZHU Wei-qiang, HUANG Pei-kang, SHU Feng, et al. Analysis of Precision of Multi-Satellite Joint Location Based on TDOA/FDOA [J].System Engineering and Electronics, 2009, 31(12):2797-2800.
[5] 苏峰, 王昌海, 徐征. 基于最小二乘的时差定位算法[J]. 雷达科学与技术,2013,11(6): 621-625. SU Feng, WANG Chang-hai, XU Zheng. TDOA Location Algorithms Based on Least Squares [J]. Radar Science and Technology, 2013, 11(6): 621-625.
[6] 曾辉,曾芳玲. 基于最小最大决策的三站时差定位布阵优化[J]. 现代防御技术, 2011, 39(1): 100-104. ZENG Hui, ZENG Fang-ling. Optimization of Station Layout Based on Minimax Principle for Tri-Station TDOA Location System[J]. Modern Defense Technology, 2011, 39(1): 100-104.
[7] LEE K,OH J,LIM M,et al.Recursive Solution of Position Determination Problem Using Time Difference of Arrival Method[J].International Journal of Control & Automation,2014,7(6):65-74.
[8] STARR J, WALKER G, VACCARO P. Cramer-Rao Lower Bound and EM Algorithm for Envelope-Based SNR Estimation of Nonconstant Modulus Constellations [J]. IEEE Transactions on Communications, 2009, 57(6): 1622- 1627.
[10] CHAN Y T, HO K C. Simple and Efficient Estimator for Hyperbolic Location [J]. IEEE Transactions on Signal Processing, 1994, 42(8):1905-1915.
[11] 李红伟, 何青益, 李淳. 运动多站无源时差定位的CRLB推导与分析[J]. 弹箭与制导学报, 2013, 33(6):167-170. LI Hong-wei, HE Qing-yi, LI Chun. Derivation and Analysis of CRLB for Moving Multi-Station Passive Location Based on TDOA [J]. Journal of Projectiles, Rochets, Missiles and Guidance, 2013, 33(6): 167-170.
[12] KOVAVISARUCH L, HO K C. Modified Taylor-Series Method for Source and Receiver Localization Using TDOA Measurements with Erroneous Receiver Positions[C]∥Proc. of the IEEE International Symposium on Circuits and Systems. Kobe, Japan: IEEE Press, 2005: 2295-2298.
[13] HO K C, LU X N, KOVAVISARUCH L. Source Localization Using TDOA and FDOA Measurements in the Presence of Receiver Location Errors: Analysis and Solution[J]. IEEE Transactions on Signal Processing, 2007, 55(2): 684-695.
[14] WANG Y, HO K C. TDOA Source Localization in the Presence of Synchronization Clock Bias and Sensor Position Errors [J]. IEEE Transactions on Signal Processing, 2013, 61(61): 4532-4544.
[15] 张贤达. 矩阵分析与应用[M]. 北京: 清华大学出版社, 2004. ZHANG Xian-da.Matrix Analysis and Application[M].Beijing:Tsinghua University Press,2004.
CRLB Analysis for Moving Multi-Platform TDOA Continuous Localization with Platform Positions Error
LUO Hui-zi, QU Chang-wen
(Naval Aeronautical and Astronautical University, Department of Electronic and Information Engineering, Shandong Yantai 264001, China)
In moving multi-platform time-difference-of-arrival(TDOA) continuous localization, precise platform locations are often not available in practice. The localization performance evaluation for such scene is not researched. Aiming at this, the Cramér-Rao lower bound(CRLB) is chosen as the evaluation index for the target localization. A augmented vector is composed using all true platform positions at different instants and the common calculation formula for the CRLB is got by its definition. According to the characteristics of the moving multi-platform TDOA continuous localization, the specific calculation formula is derived. Simulation results indicate the effectiveness of the derived index for the performance evaluation in the aforementioned scene. The influence of the platform’s position error should be considered in system technical index and localization algorithm design for both the near-field target and the far-field target.
multi-platform; positioning; platform position error; TDOA; CRLB; simulation
2016-03-28;
2016-05-09 基金项目:航空科学基金(20105584004) 作者简介:骆卉子(1985-),女,山东烟台人。博士生,主要从事无源定位跟踪技术研究。
10.3969/j.issn.1009-086x.2017.02.020
TN953+.7;TN958.97
A
1009-086X(2017)-02-0130-04
通信地址:264001 山东省烟台市二马路188号海军航空工程学院电子对抗教研室 E-mail: jessica_lhz@163.com
猜你喜欢
中学生数理化·八年级物理人教版(2021年12期)2021-12-31 03:23:02
应用数学(2020年2期)2020-06-24 06:02:40
电子制作(2019年12期)2019-07-16 08:45:14
测控技术(2018年9期)2018-11-25 07:44:12
北京航空航天大学学报(2017年6期)2017-11-23 05:57:06
互联网天地(2016年2期)2016-05-04 04:03:23
火控雷达技术(2016年2期)2016-02-06 02:28:51
电测与仪表(2015年18期)2015-04-12 00:45:28
电测与仪表(2015年13期)2015-04-09 11:57:34
中国舰船研究(2014年6期)2014-05-14 06:45:17