垂直钻井系统矢量控制纠斜算法设计*
2017-05-12 02:01:45吴文晋白玉新程召江李艳丽
石油管材与仪器 2017年2期
吴文晋,白玉新,程召江,李艳丽
(1.航天科技集团第十八研究所 北京 100076;2.中石油西部钻探工程有限公司钻井工程技术研究院 新疆 克拉玛依 834000;3.大庆第五采油厂 黑龙江 大庆 163000)
·开发设计·
垂直钻井系统矢量控制纠斜算法设计*
吴文晋1,白玉新1,程召江2,李艳丽3
(1.航天科技集团第十八研究所 北京 100076;2.中石油西部钻探工程有限公司钻井工程技术研究院 新疆 克拉玛依 834000;3.大庆第五采油厂 黑龙江 大庆 163000)
传统的垂直钻井设备控制策略中,由于液压分系统的限制,一般采用六位置控制策略,所以设备的控制合力指向角不能准确指向高边方向,控制精度难以满足需求,易造成井眼轨迹螺旋化。为了克服六位置控制方式的不足,在液压分系统输出压力可控条件下,提出了一种矢量控制方法;通过矢量分解得出每个液压分系统需要输出的分力,保证液压机构输出的合力精确指向高边方向,并讨论了在液压分系统输出能力有限时合力指向的精度误差。此方法克服了六位置控制算法不能精确导向的缺点;井下试验验证了控制算法的可行性和工作可靠性。
垂直钻井系统;矢量控制算法;六位置控制算法;导向力合力;合力指向角
0 引 言
随着石油钻探向更深、更偏远领域的拓展,钻探成本不断增加;高陡构造、断层、盐层等地质条件下,钻井容易出现井斜角过大,严重影响钻井效率[1]。垂直钻井系统(以下简称垂钻系统)是一种具有主动防斜能力的井下机电液一体化制设备,钻进过程中具有自动控制井斜的作用,对于改善井眼质量,提高机械钻速具有积极作用[2,3]。
垂钻系统按照其工作方式不同,可以分为推靠式和指向式。推靠式在导向过程中,导向块伸出并推靠井壁产生侧向力,控制钻进方向改变;指向式中导向块的伸缩使近钻头处与钻头相连的旋转钻柱弯曲,使旋转钻柱的轴线和井眼轴线之间出现夹角,从而实现钻进方向改变[4]。
因为工具的机械结构不同,垂钻纠斜策略的控制方式也不同。文献[5]中孙峰等人介绍了捷联式垂钻设备及其动态推靠式的控制原理和控制方法。文献[6,7]对调制式导向设备的控制算法和导向力合成误差进行了详细分析。但上述的捷联式和调制式系统同静态推靠式系统机械结构有着本质不同。文献[8]中苏义脑等人介绍了静态推靠式垂钻系统的控制方法,即传统六位置控制方法。文献[9]中介绍了一种旋转导向用位移偏执矢量控制算法,该方法已成功用于旋转导向钻井试验,该矢量算法导向原理类似于可控弯接头,与本文提出的推靠式矢量方法有本质不同。以下为静态推靠式矢量控制算法原理与实现。
1 原有控制方法及不足
垂钻工具测量的工程参数包括井斜角和高边工具面角。井斜角反映了井眼轨迹的倾斜程度,高边工具面角反映了推靠式垂钻工具不旋转外套的零位相对于高边旋转的角度。在原有的推靠式垂直钻井工具中,一般采用六位置或八位置方式进行纠斜控制[10]。六位置控制方式垂直钻井工具中,液压执行机构一般由三个或者四个导向块和与导向块配套的电磁阀组成,并配有一个电动泵或其他形式的液压泵作为液压动力源,如图1所示。因为电磁阀只有开关两种状态,决定了液压机构的导向块只有伸出和缩回两种工作方式,并且每个导向块输出的导向力恒定,不能调节输出力的大小。

图1 六位置控制方式的液压执行机构原理图
产品设计中常常将导向块A位置设计成高边工具面角零度,导向块A、B、C顺时针排布,如图2所示。垂钻设备以斜角作为控制对象,当实测井斜角大于阈值时,对应高边工具面角的导向块伸出,将工具向井斜角减小的方向推靠,改变工具钻进方向,从而实现纠斜的目的。以图2为例,控制策略中高边工具面角和导向块之间的关系见表1。
由表1可知,合力指向角总有六种组合,因此称为“六位置控制”,理论上最差情况下,合力指向角和高边有30°的夹角。实际工况中,不旋转外套和旋转外套之间通过轴承连接,不可避免的存在不旋转外套缓慢旋转情况,并且系统进行一次闭环运算周期时间较长,加剧了合力指向角和高边工具面角间的不重合度,严重时造成井眼轨迹螺旋化。
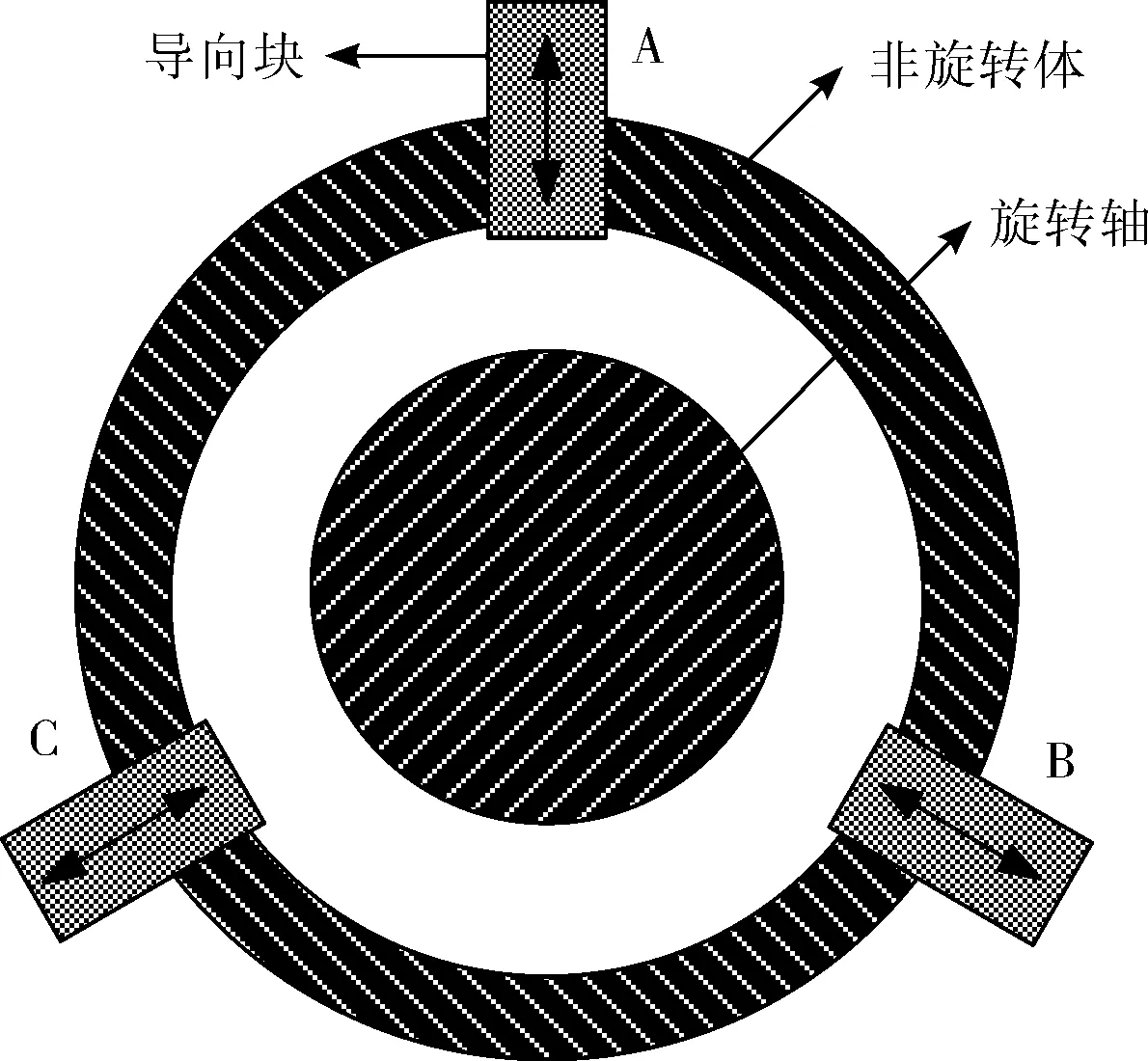
图2 三导向块推靠式液压模块示意图
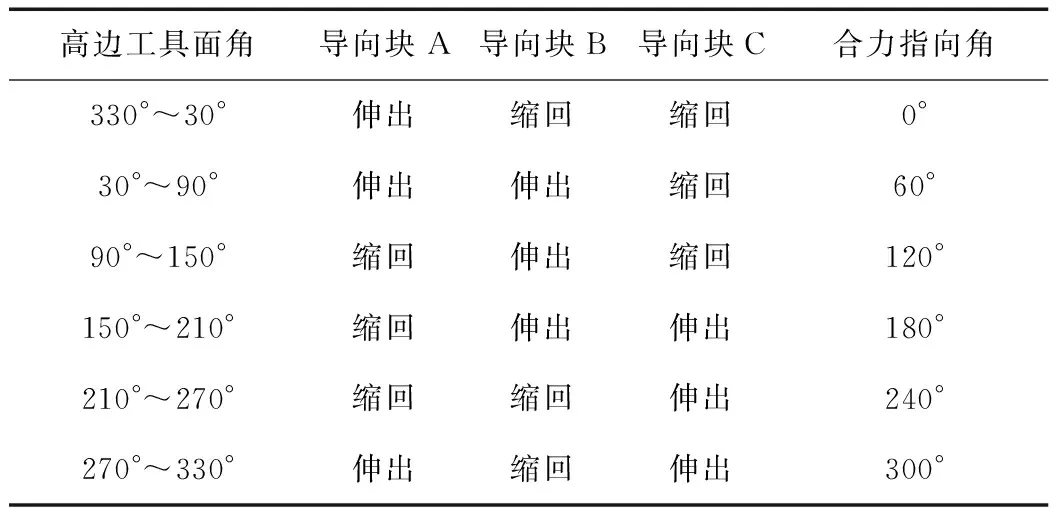
高边工具面角导向块A导向块B导向块C合力指向角330°~30°伸出缩回缩回0°30°~90°伸出伸出缩回60°90°~150°缩回伸出缩回120°150°~210°缩回伸出伸出180°210°~270°缩回缩回伸出240°270°~330°伸出缩回伸出300°
2 矢量控制算法
为了克服六位置控制方法的不足,使得合力指向角精确指向高边工具面角,需对推靠式垂钻设备的液压执行机构进行改造,改造后的液压机构单个导向块的输出导向力可控。在垂钻工具导向块排列上,仍然采用和六位置控制方式相同的排列方式。矢量控制方式导向块输出指定大小的力,各个导向块不是简单的伸出或缩回,而是在合力的作用下推靠在井壁上。在井壁的反作用力下,三个导向块伸缩状态不同。
为了保证输出理想合力精确指向高边工具面角,需要对指向工具面角的理想合力进行矢量分解。如图3所示,图中坐标系为顺时针旋转复数坐标系;导向块分力和理想合力满足如式(1)关系。
(1)

工具设计中,往往将导向块A的位置设计为高边工具面角零度位置,导向块B对应高边工具面角120°位置,导向块C对应高边工具面角240°位置。公式(1)可以写成:
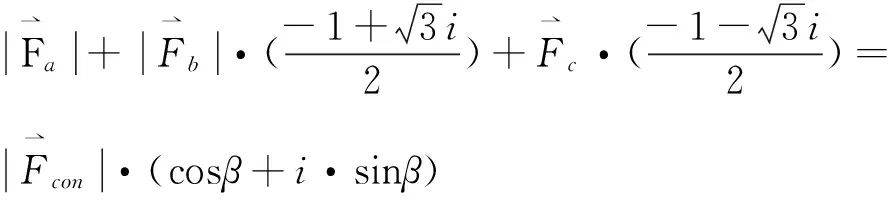
(2)
图3 导向块输出力和合力示意图
转换为方程组:
(3)

当0°≤β≤120°

(4)
当120°≤β≤240°
(5)
当240°≤β≤360°
(6)

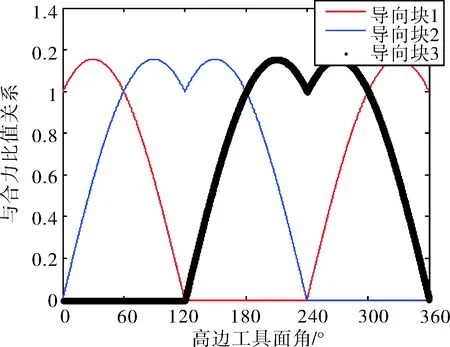
图4 各个导向块输出力与高边工具面角关系
(7)
在一些地层造斜力较大的场合,垂钻工具对工具纠斜能力有更大的要求。此时可以适当放宽对合力指向角和高边工具面角控制精度的要求,转而要求随时输出最大的合力,以全力控制降斜。指定合力大小等于Fmax,此时三个导向块输出合力的大小随着高边工具面角变化而变化,角度也会同高边工具面角发生偏差。下面采用矢量控制算法,计算在这种条件下,输出导向合力和Fmax的关系。以及导向合力指向角和高边工具面角的偏差。以0°≤β≤120°为例,由于各个模块最大输出力不会超过Fmax;0°≤β≤60°内各个导向块实际输出力,如式(8)所示:
(8)
合力如式(9)所示:
(9)
(10)

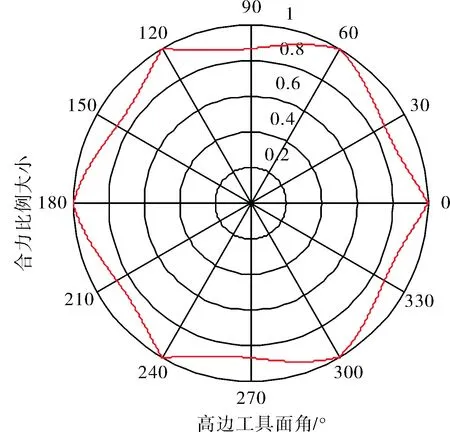
图5 合力大小和高边工具面角关系
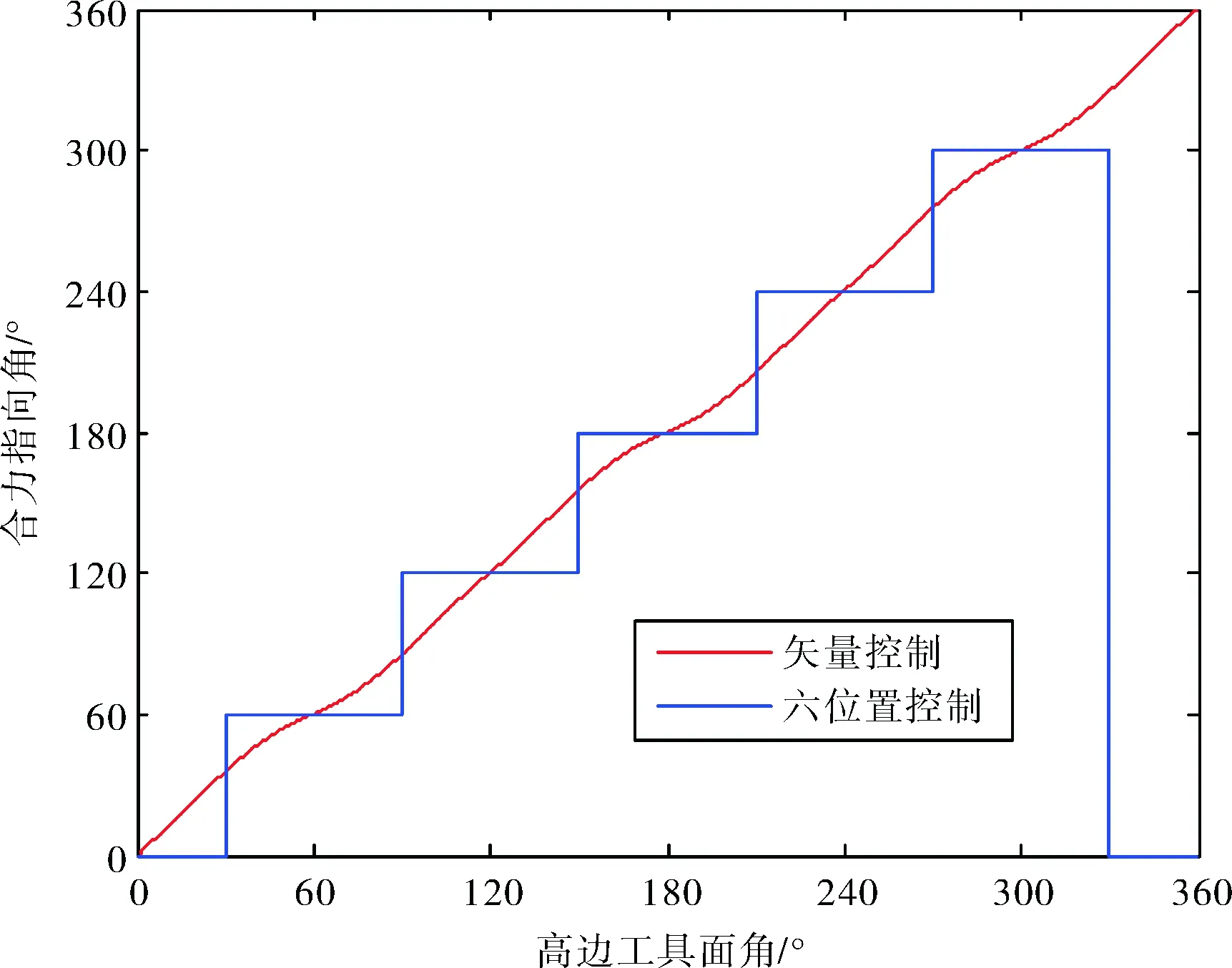
图6 矢量算法与六位置算法控制角度误差
同理可以计算出,β在37.64°、82.36°、157.64°、202.36°、241.64°及322.36°时跟高边工具面角出现最大偏差,偏差角度5.688°;合力指向角同高边关系如图6所示。
3 实验验证
为了测试矢量控制算法的有效性,垂钻设备采用矢量控制算法,在新疆阿克苏克深08-XX井进行了井下实验;此次试验采用最大合力的工作方式。设备入井时井深2 921 m,井斜0.9°。单次入井纯工作时间92 h,钻进420 m。设备工作初期井眼轨迹井斜角从0.9°下降到0.3°;此后由于垂钻设备采用滞环方式进行降斜控制,井斜角长期徘徊在0.2°~0.4°之间。
图7为设备井下工作初期(只有开泵通泥浆条件下设备才能记录数据,此数据为截取的初期500分钟的数据)记录的井斜角和设备合力数据。可以看出,整个设备工作期间,井斜角逐步下降,并稳定至0.3°附近。与井斜角相对应,合力大小在井斜角低于0.3°后降到零附近,原因是在允许工程误差范围内,经验上认为此时无需控制。图中23D,21:44:28时左右,井斜角出现一次较大波动,此次波动主要由现场设备划眼引起。此次划眼造成了井斜角超过滞环阈值0.4°,设备开始纠斜。
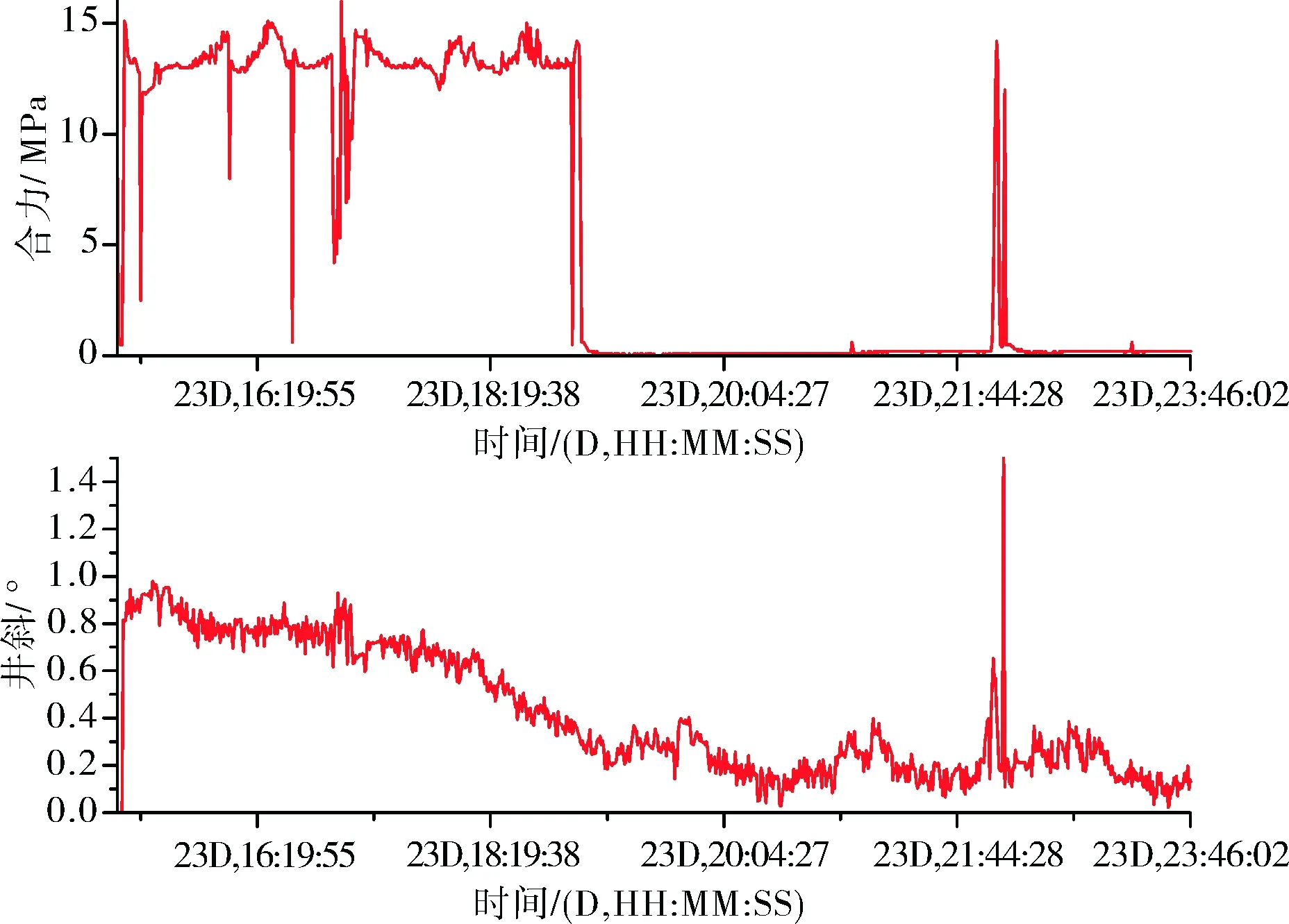
图7 井下井斜角与合力大小情况
图8为井下存储的高边工具面角和合力指向角情况。从图中对比可以看出合力指向角跟随着高边工具面角变化。23D,18:19:38后合力指向角和高边工具面角不再具有对应关系,原因同样为井斜角下降到工程运行误差以内,设备停止控制。
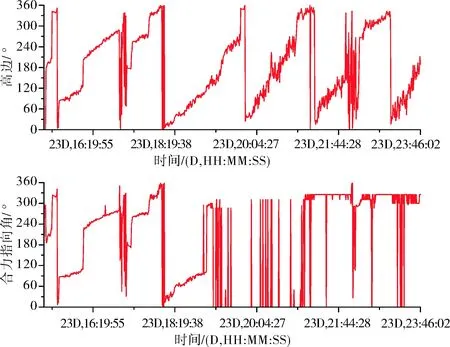
图8 井下高边工具面角和合力指向角对应图
图9采用统计方法,记录以上时间段内合力指向角和高边工具面角关系,以及合力大小同高边工具面角关系。从图中可以看出,合力大小和高边具有明显的周期特征,从0°开始,每隔60°合力大小出现一次最大值,与理论分析一致;合力大小还有一部分数据出现在0附近,是因为该工作点时刻井斜角已经降到允许范围以内,液压设备停止工作。实测井下合力指向角和高边虽然具有较好的跟随性,但和理论分析有一定程度的误差,现场分析与A、B工位压力偏低有关,即A、B工位的最大输出力小于要求输出的最大合力值。统计得出的最大误差角度约16°;同许多合力点分布在0°附近一致,合力指向角许多工作点分布在0°或者360°附近,也是因为该工作点时刻设备停止控制所致。
4 结束语
垂钻具有可控压力的输出能力后,通过调整控制方式,使得垂钻设备具有了精确指向高边的能力。矢量控制方式能够克服传统六位置控制可能引起的井眼轨迹螺旋化的缺点,另外矢量控制算法能让垂钻设备能够准确改变钻进方向,也为垂钻设备发展到旋转导向设备提供了技术支持。
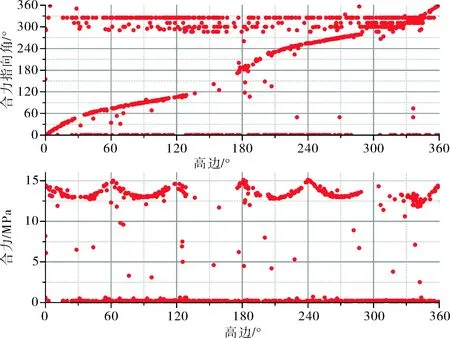
图9 合力与其指向角同高边工具面角关系
[1] 张邵槐. 深井、超深井和复杂构造井垂直钻井技术[J].石油钻探技术. 2005, 33(5): 11-15.
[2] 艾才云, 穆总结, 宋朝晖,等. Φ311mm垂直钻井系统的工作原理及现场应用[J].钻采工艺, 2010, 33(3):40-42.
[3] 艾才云, 许树谦, 穆总结,等. Φ311自动垂直钻井系统技术探讨[J].新疆石油天然气, 2011, 07(1):27-30.
[4] 张 萌. 自动控向垂钻系统小型化设计的关键技术研究[D].中国地质大学[武汉], 武汉,2010 .
[5] 孙 峰,吕官云,马清明,等. 捷联式自动垂直钻井系统[J].石油学报,2011, 32(2):360-363.
[6] 狄勤丰, 韩来聚, 孙铭新.调制式旋转导向系统导向力等力合成模型的建立与分析[J].石油大学学报(自然科学版), 2004,28(6): 35-37.
[7] 韩来聚, 孙铭新, 狄勤丰. 调制式旋转导向钻井系统工作原理研究[J].石油机械,2002,30(3) 7-9.
[8] 苏义脑, 李松林. 自动垂直钻井工具的设计及自动控制方法[J].石油学报, 2001.22(4): 87-91.
[9] 程载斌, 姜 伟, 蒋世全, 等. 旋转导向系统三翼肋偏置位移矢量控制方案[J].石油学报,2010, 31(4)676-679.
[10] 吴文晋, 梁 军, 白云新,等. 垂直钻井系统中央控制器设计[J].石油仪器, 2012,26(1): 5-7.
Design of Vector Control Algorithmin for Vertical Drilling System
WU Wenjin1, BAI Yuxin1, CHENG Zhaojiang2, LI Yanli1
(1.ChinaAcademyofLauchVehicleTechologyNo.18ResearchInstitute,BeiJing, 100076,China;2.CNPCXIBUDrillingEngineeringCompanyLimitedDrillingTechnologyResearchInstitute,Karamay,Xinjiang834000,China; 3.DaqingOilfieldNo.5ProductionPlant,Daqing,Heilongjiang163000,China)
The ‘six-position’ control strategy is adapted in the traditional vertical drilling system due to the limitation of the hydraulic sub-system. Therefore, the resultant force pointing angle of the equipment can not accurately point to the high-side direction, and the control precision is difficult to meet the demand. In order to overcome the shortcomings of the six-position control method, a vector control method is proposed under which the output pressure of the hydraulic subsystem is controllable. The output force of each hydraulic subsystem can be calculated by vector decomposition to ensure that the resultant force of the hydraulic mechanism is directed to the high-side direction precisely. The error of the resultant force of the hydraulic sub-system is discussed when the output capacity of the hydraulic sub-system is limited. This method overcomes the shortcomings of the six-position control algorithm which cannot be precisely guided. The feasibility and reliability of the control algorithm has been verified by down-well test.
vertical drilling system; vector control algorithmin; ‘six-position’control; composition of forces; angle of composition of forces
国家科技重大专项“西部山前复杂地层安全快速钻进技术”(编号2011ZX05021-001)。
吴文晋,男,1985年生,2010年毕业于北京航空航天大学,目前主要从事电子控制器软硬件设计工作。E-mail:tonglifewu@163.com
TE243
A
2096-0077(2017)02-0013-05
10.19459/j.cnki.61-1500/te.2017.02.004
2014-12-08 编辑:马小芳)
猜你喜欢
中学生数理化(高中版.高考数学)(2022年2期)2022-04-26 14:05:02
云南化工(2021年10期)2021-12-21 07:33:32
广东教育·高中(2021年11期)2021-12-01 11:58:56
陕西画报(2021年1期)2021-04-22 14:14:20
云南化工(2020年11期)2021-01-14 00:51:02
河北理科教学研究(2020年2期)2020-09-11 06:15:56
当代工人(2019年11期)2019-07-10 14:59:10
数学学习与研究(2016年1期)2016-07-04 14:54:19
试题与研究·教学论坛(2016年16期)2016-07-02 08:38:22
中国工程咨询(2015年10期)2015-02-14 05:57:38