
粒子滤波的噪声相关下单步延迟无序量测更新算法
2017-05-10 13:01:31胡建旺
传感器与微系统 2017年5期
赵 凯, 胡建旺, 吉 兵
(军械工程学院 信息工程系,河北 石家庄 050003)
计算与测试
粒子滤波的噪声相关下单步延迟无序量测更新算法
赵 凯, 胡建旺, 吉 兵
(军械工程学院 信息工程系,河北 石家庄 050003)
在目标跟踪系统中,因通信延迟等原因会出现传感器量测无序地到达融合中心的现象,将这些量测称为无序量测(OOSM)。针对过程噪声、量测噪声相关的非线性系统中出现的无序量测问题,在现有算法基础上,提出了一种可处理单步延迟无序量测的新算法。在前向预测滤波框架下,对系统方程去相关化,并利用粒子滤波(PF)进行状态估计。仿真结果验证了算法的有效性。
无序量测; 非线性; 噪声相关; 粒子滤波
0 引 言
在集中式目标跟踪系统中,各传感器的通信延迟、预处理时间与采样速率等存在差别,会有传感器信息不能同步到达融合中心的现象出现,这种现象称为异步现象[1,2]。在此情形下,对于同一个目标,若有较早时刻产生的量测在较晚时刻产生的量测之后到达融合中心,则称这些量测为无序量测(out-of-sequence measurement,OOSM)。
目前,直接更新法是实时处理OOSM问题的主流滤波方法,即融合中心存储目标的状态估计与估计误差协方差矩阵,直接利用收到的OOSM对当前状态估计进行再更新,得到新的目标状态充分估计量[3]。直接更新法有存储量、计算量较小,没有输出延迟等优点,因此,学者们在此滤波思想下先后提出了A1,B1,AA1,FPFD[3]等线性系统下的滤波算法。
对于弱非线性高斯系统,文献[4]提出EKF—A1算法,将非线性系统线性化,再应用已有的A1算法,这种算法较为简单,但可能存在较大的滤波误差[4];文献[4]还提出使用UT变换求解非线性量测方程的雅可比矩阵或海赛因矩阵,但近似误差较大,且当系统方程为非线性时无法求解。对于强非线性系统,文献[5,6]推导出包含OOSM的后验概率密度,提出了基于粒子滤波的OOSM处理算法。当传感器系统处于共同的噪声环境中时,常会出现过程噪声与量测噪声相关的情形。文献[7,8]分别给出了解决噪声相关的OOSM问题的滤波算法,但对非线性系统中OOSM问题无法处理。
本文提出在前向预测滤波框架下,对非线性系统方程进行恒等变换,从而去相关化,再利用粒子滤波对系统状态进行更新。算法可有效处理单步延迟OOSM问题。
1 问题描述
假定非线性离散时间系统如下
xk=fk,k-1(xk-1)+Γk,k-1wk,k-1
(1)
zk=hk(xk)+vk
(2)
式中xk与zk分别为n维状态向量和m维量测向量;fk,k-1(·)为n维非线性状态转移矩阵,hk(·)为非线性量测函数;wk,k-1,vk分别为p维系统噪声和m维量测噪声,均为高斯白噪声;Γk-1为n×p维噪声输入矩阵。
假设1wk,k-1和vk为相关的高斯白噪声,其统计特性如下
式中Qk为非负定对称阵,Rk为正定对称阵,δkj为krone-cker-δ函数。
假设2 初始状态x(0)与wk,k-1、vk互不相关,且服从高斯正态分布,其均值、协方差矩阵为
由式(1)可得
xk=fk,d(xd)+Γk,dwk,d
(3)
假定在t=tk时刻,融合中心已获得后验分布p(xk|z1∶k),进而得到状态向量的充分统计量

(4)
式中Zk为t=tk时刻累积量测值。
随后,来自t=td时刻的量测
zd=hd(xd)+vd
(5)


图1 单步延迟无序量测
2 算法设计
针对上节给定的非线性离散系统,考虑同一时刻过程噪声与量测噪声相关的情形,提出解决单步延迟OOSM问题的滤波算法。算法首先根据最小均方误差准则,将系统方程作恒等变形,实现噪声去相关化[9]。其次,基于前向预测方法,在有序状态转移方式下[10],用粒子滤波算法[11,12]处理延迟到达的量测。
2.1 噪声去相关化
贝叶斯估计要求系统中各种噪声互不相关,故式(1),式(2)表示的非线性离散时间系统不能直接进行贝叶斯估计。因此,先将系统方程作恒等变换,去除两种噪声的相关性,随后进行滤波估计。去相关化过程如下所述。
将式(2)变形为
zk-hk(xk)-vk=0
(6)
将上式代入系统方程(1)
xk=fk,k-1(xk-1)+Γk-1wk,k-1+Jk-1[zk-1-
hk-1(xk-1)-vk-1]
=fk,k-1(xk-1)+Jk-1[zk-1-hk-1(xk-1)]+
Γk-1wk,k-1-Jk-1vk-1
(7)
易知式(7)与式(1)等价,其中
Ψk,k-1(xk-1)=fk,k-1(xk-1)+Jk-1[zk-1-hk-1(xk-1)]
(8)
(9)
式中Jk-1为待定系数。
(10)

(11)
zk=hk(xk)+vk
(12)

(13)
(14)
(15)
2.2 噪声相关下单步延迟无序量测更新算法
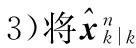
1)将式(1),式(2)所表示的原始运动方程转换为去除相关性的运动方程(11),式(12)。
2)用PF计算重构航迹:

b.各粒子一步预测为
(16)
(17)
归一化得到
(18)
可计算出状态估计及其估计误差协方差矩阵为
(19)
(20)

由此,得到了基于粒子滤波的噪声相关下单步延迟OOSM更新算法。算法在前向预测框架下,对系统方程去相关化,并利用粒子滤波进行状态估计。算法将已有估计近似为量测值进行再次滤波。相比于现有算法,新算法有更好的滤波效果,这主要因为:去除了系统的噪声相关性,减小了处理实际系统OOSM问题的滤波误差;新算法采用前向滤波,不需要储存大量粒子及权重,减小了算法存储量。
此外,算法中可以采用优选分布采样滤波,如不敏卡尔曼粒子滤波、扩展卡尔曼粒子滤波等作为基础滤波算法,在粒子产生时融入观测信息,进一步提高了粒子的质量和效能。
3 仿真实验
采用二维空间中运动模型
xk=Fk,k-1xk-1+Γk,k-1wk,k-1
(21)
zk=h(xk)+vk
(22)
γ,θ分别为目标的距离和偏转角,量测方程可表示为
(23)
采样周期T=1,初始值为x0=[20 -2 10 -1]T,P0=I,ω=π/9,采样粒子数为N=500。
假设传感器获得5个量测,由于有OOSM,最后收到的量测排列顺序为:z1,z2,z4,z3,z5。在此,分别采用不同算法处理这组量测,以验证算法性能。
1)实验1,采用文献[6]算法处理含OOSM的量测序列z1,z2,z4,z3,z5。
2)实验2,采用新算法处理含OOSM的量测序列z1,z2,z4,z3,z5。
3)实验3,采用丢弃量测法处理量测序列,即只处理z1,z2,z4,z5。

图2 目标运动轨迹
在此,分别采用不同算法处理这组量测,以验证算法性能。表1给出了最后时刻滤波器输出的位置均方根误差(RMSE)与协方差矩阵的迹(trace)。图3给出3种实验所得x轴向、y轴向的估计与真实值的比较。进行500次MonteCarlo仿真。
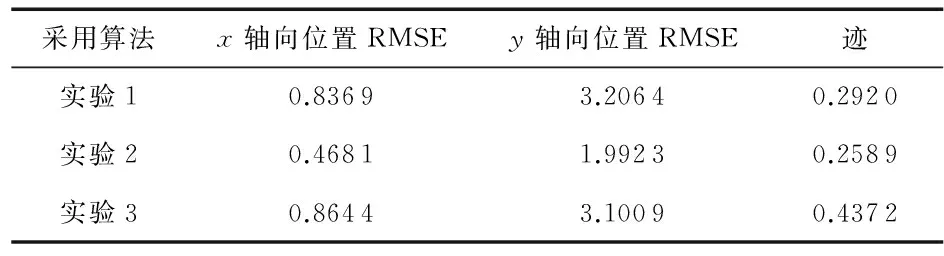
表1 不同实验结果对比
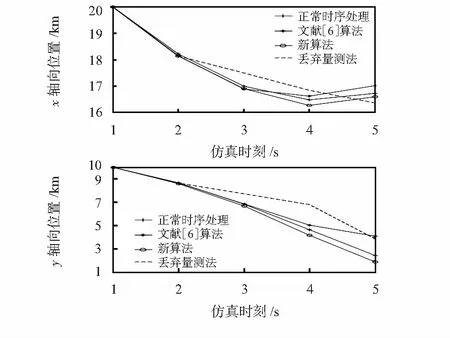
图3 x轴向与y轴向估计
通过比较表1和图3中的数据与结果,可以得到以下结论:
1)将实验2结果与实验3比较,可以看出,本文算法估计精度要优于丢弃量测法,且接近于真实值,说明本文算法可有效处理OOSM。
2)对比实验2与实验1结果,可以看出在处理延迟到达的量测z3时,两种算法估计精度基本相当,且在最新时刻实验2结果优于实验1。说明噪声去相关化处理的有效性。
3)对比图3中时刻 位置估计,可以看出实验1结果有发散趋向,证明了噪声去相关处理的必要性。
4)实验2误差协方差矩阵的迹最小,新算法滤波稳定性优于其它两种算法。
4 结 论
针对非线性系统同一时刻过程噪声与量测噪声相关的情形,给出了基于前向预测的单步延迟OOSM更新算法。1)将系统方程进行恒等变换,去除了噪声相关性;2)在前向预测框架内,借助粒子滤波器处理OOSM,实现状态的更新。新算法处理的是单步延迟OOSM问题,今后还可以研究针对多步延迟的问题。此外,对于多传感器目标跟踪系统,还可能存在不同传感器的量测噪声相关的情形,对此还有待于进一步研究。
[1] 韩崇昭.多源信息融合[M].北京:清华大学出版社,2006.
[2] 王洪锋,周 磊,单甘霖.国外军事信息融合理论与应用的研究进展[J].电光与控制,2007,14(4):13-18.
[3] 吴卫华,江 晶.无序量测问题研究综述[J].传感器与微系统,2014,33(12):5-9.
[4] 陈金广,李 洁,高新波.基于UT变换的单步滞后无序量测算法[J].中国科学:信息科学,2011(5):638-648.
[5] Zhang S,Barshalom Y.Out-of-sequence measurement processing for particle filter:Exact Bayesian solution[J].IEEE Transactions on Aerospace and Electronic Systems,2012,48(4):2818-2831.
[6] Berntorp K,Robertsson A,Arzen K E.Rao-blackwellized particle filters with out-of-sequence measurement processing[J].IEEE Transactions on Signal Processing,2014,62(24):6454-6467.
[7] 胡建旺,袁 丁,吉 兵,等.噪声相关下的一步延迟无序量测滤波算法[J].电光与控制,2013(10):69-72.
[8] 高 蕊,秦超英,张希彬.无序量测的状态更新估计算法[J].传感技术学报,2006,19(2):501-503.
[9] 钱华明,葛 磊,黄 蔚,等.基于贝叶斯估计噪声相关下的CKF设计[J].系统工程与电子技术,2012,34(11):2214-2218.
[10] 黄细凤,吴钦章.顺序更新式无序量测处理算法[J].传感技术学报,2012,25(2):224-228.
[11] 张 淼.基于粒子滤波的机动目标跟踪方法研究[D].石家庄:军械工程学院,2008.
[12] 侯 静,景占荣,羊 彦.远距离干扰环境下目标跟踪的扩展卡尔曼粒子滤波算法[J].电子与信息学报,2013(7):1587-1592.
[13] Kitagawa Genshiro.Monte Carlo filter and smoother for non-Gaussian nonlinear state space models[J].Journal of Computational & Graphical Statistics,2012,5(1):1-25.
Update algorithm on one-step-lag out-of-sequence measurement with correlated noise based on particle filtering
ZHAO Kai, HU Jian-wang, JI Bing
(Department of Information Engineering,Ordnance Engineering College,Shijiazhuang 050003,China)
In target tracking system,sensor measurements may arrive at the fusion center out of sequence because of communication delays,and these measurements are called out-of-sequence measurement(OOSM).On the basis of existing algorithm,a new algorithm is proposed,which can solve one-step-lag OOSM problem occur in process noise and the measurement noise correlated in nonlinear system.By combing the framework of the forward prediction filtering, wipe off the correlation,and use particle filtering to estimate the state.Simulation results verify the effectiveness of the proposed algorithm.
out-of-sequence measurement(OOSM); nonlinear; correlated noise; particle filtering(PF)
10.13873/J.1000—9787(2017)05—0141—04
2016—06—13
TP 391
A
1000—9787(2017)05—0141—04
赵 凯(1991-),男,硕士研究生,主要研究方向为多源信息融合,目标跟踪,E-mail:609587194@qq.com。
猜你喜欢
汽车实用技术(2022年14期)2022-07-30 06:10:54
测控技术(2018年10期)2018-11-25 09:35:54
浙江工业大学学报(2017年5期)2018-01-22 02:03:46
能源(2017年11期)2017-12-13 08:12:30
山西大同大学学报(自然科学版)(2016年2期)2016-12-12 03:19:10
国际政治科学(2016年2期)2016-10-20 02:25:54
空间控制技术与应用(2015年3期)2015-06-05 14:30:31
遥测遥控(2015年2期)2015-04-23 08:15:18
电子设计工程(2014年20期)2014-02-27 12:01:00
物理与工程(2014年4期)2014-02-27 11:23:08
