
机场跑道异物监测系统的设计容差
2017-05-10 13:39王沛彭德润张艳
电子技术与软件工程 2017年8期
关键词:误差分析
王沛+彭德润+张艳
摘 要
机场跑道异物(foreign object debris, FOD)是威胁飞机起降安全的重要因素。利用车载的雷达、摄像、定位等设备快速检测并回收FOD是现今国际上新颖的一种监测手段。本文通过对一种新型移动式机场跑道安全监测系统相关技术指标进行系统级的设计容差分析,验证方案所提出的指标能够达到最终目标。通过分析各独立部件自身的误差数据,并引入数据传输延时的影响,再以仿真的方式进行融合计算得到整体系统的容差范围。通过仿真实验验证了系统的虚警、漏警这两个重要指标,验证了方案的可行。
【关键词】机场跑道异物 误差分析 系统虚警 系统漏警
机场跑道异物(foreign object debris, FOD)[1]是指任何出现在机场中不合适位置的物体,这种物体能够给机场或者航线的工作人员带来危险并在飞机起降过程中可能导致飞机损坏。2000年7月25日,因为跑道上的一块45公分长的金属条导致了法航一架协和式客机起飞两分钟后即坠毁,造成113人遇难[2]。协和客机的悲剧发生后,国外许多公司纷纷开展了对FOD探测系统的研究与开发,如今,欧美国家的一些大型民航机场已经陆续安装FOD监测系统,我国在该领域尚处于研究和探索阶段,尚无机场安装类似的监测系统,该技术是目前民航安全密切关注的重要发展方向。
国内的机场跑道异物检测手段尚停留在人工巡检的方式,这样的检测方式不但效率极低,不能夜晚作业,还易发生漏检的情况。基于国内低效的机场跑道异物检测现状,针对机场的实际需要,研制了一款移动式机场跑道安全监测系统。该系统利用车载的雷达、摄像等检测设备,能够快速、实时地将跑道上的异物检测出来。该系统的设计技术指标要符合美国民航局出具的FAA咨询通告[3]及中国民航局机场司民航局安全技术中心出具的FOD防范手册[4]中规定的指标。在各类指标中,虚警率指标是会扰乱机场正常运行的关键指标;漏警率指标是会影响飞机起、降和滑行安全的关键指标。因此,虚警率和漏警率是系统的可靠性指标,是影响机场用户使用信心的最主要指标。本系统的可靠性指标需满足[5]:虚警率≤2%;漏警率≤5%。
由于移动式机场跑道安全监测系统采用雷达、摄像、定位等多个子系统进行数据传输、计算,每个子系统的检测数据均存在误差,这些误差及耦合的误差会严重影响系统的可靠性。因此,为确保设计的系统可靠,必须要对跑道安全监测系统开展设计容差研究。
1 系统介绍
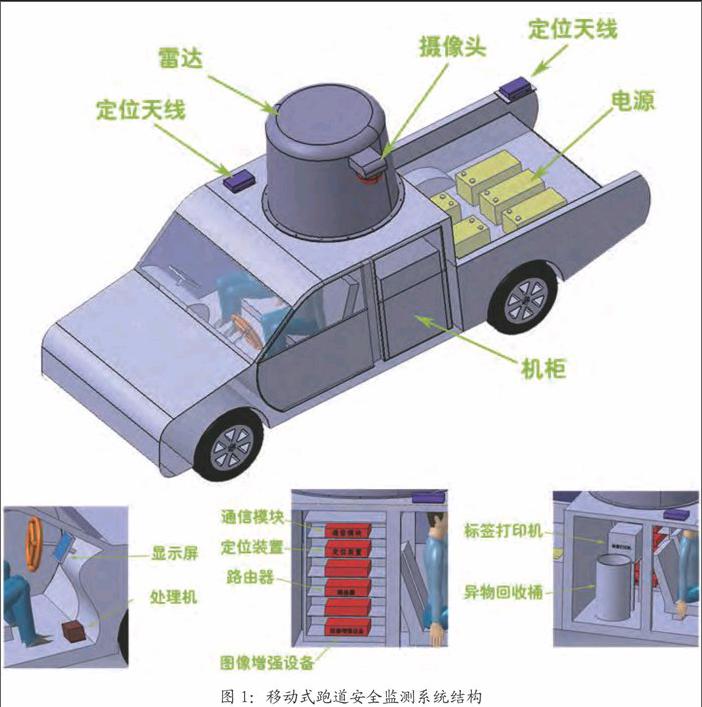
移动式跑道安全监测系统通过车辆搭载的雷达系统、定位系统、摄像系统、处理机、通信模块、扫描和打印等设备探测跑道上的FOD并快速回收。系统选用皮卡车[6]作为承载载体,雷达装载于车辆顶部,外部用雷达罩完全遮蔽,摄像头固定于雷达罩上,定位定向天线固定于车身一侧,显示器及主机安装于副驾前方,其他设备置于主副驾后方,供电采用位于车厢内的电池。其具体结构如图1所示。
系统工作时,跑道安全巡查人员坐在副驾驶,操作跑道安全监测系统。当雷达检测到FOD时,雷达系统记录FOD的位置、方向等数据,并将FOD数据发送至处理机,处理机通过该数据实时解算FOD在跑道上的位置,并根据解算出的异物信息去匹配异物置信度模型,当第一次检测出该FOD时,初始化该异物的置信度信息,后续检测时根据置信度匹配情况调整该异物的置信度指标,最终根据相应的置信度阈值信息确认FOD。通过这样的方式,在车辆的行进过程中,不断的检测并回收FOD,从而高效的完成机场跑道异物的监测和清理任务。
2 容差分析
影响移动式跑道安全监测系统可靠性指标的的主要误差源有:定位系统产生的车辆位置误差,定位刷新率产生的车辆位置误差,定向产生的车辆方位误差,雷达系统产生的异物距离误差,雷达系统产生的异物方位误差。现已确定,车载雷达系统的探测距离是20至200米范围,所要探测的FOD最小尺寸等效于高3厘米、直径3.8厘米的圆柱形物体[7],雷达波段需达到甚高频[8],雷达的方向分辨率为20厘米,雷达的转角误差应小于0.05°。现有的定位系统的可选择的数据刷新率有20Hz、15Hz、10Hz和5Hz 4种,非差分式定位系统的定位误差最小为3米,差分式定位系统的定位误差为厘米级;受车辆长度的限制,定向天线间距离最大为3米,定向精度最小为0.05°。
2.1 系统虚警
虚警是指当噪声信号超过雷达检测门限时,雷达误认为发现目标,从而向用户告警。系统虚警是指系统层级产生的雷达虚警,即对于一个异物,由于系统间数据传输延时、系统计算的误差,导致最终向用户呈报多个异物的现象。
假设,异物坐标为(xfod,yfod),雷达第一次检测到该异物时,车辆实际位置坐标为(x1,y1),该位置处于距异物200米范围内的任意位置,即有:
(1)
雷达第一次测距距离为L1,检测到异物的转角为θ1,车辆定向角度为φ1。雷达第二次检测到该异物时,车辆实际坐标为(x2,y2),该位置处于第一次检测到异物的坐标和实际异物坐标之间,即有:
x1
雷达第二次测距距离为L2,检测到异物的转角为θ2,车辆定向角度为φ2。上述变量均为未引入误差时的真实值,由于各系统本身存在误差,故需将误差引入进行分析。
由于定位系统最高以20Hz的頻率向主机发送定位数据,当雷达扫描到异物,获取车辆绝对位置的时刻存在0.05秒的误差,即当前时刻可能是0.05秒时段的任意时刻,因此需要读取最接近当前时刻的0.05秒整数倍时刻的定位数据作为当前时刻的定位数据。车辆行进的最大时速为40km/h,0.05秒最大可能产生0.55米的定位误差,故而需要对两次车辆定位数据加入0.55×rand(1,1)(rand(1,1)表示取一个小于1的随机数)的误差,即有:
xi=xi+0.55×rand(1,1),i=1,2 (3)
(4)
将公式3代入公式4即可解得两次定位的y坐标。
雷达方向位的分辨率为20厘米,故可直接引入误差0.2×rand(1,1),即有:
Li=Li+0.2×rand(1,1),i=1,2 (5)
同理,引入雷达转角误差和定向误差,即有:
θi=θi+0.55×rand(1,1),i=1,2 (6)
φi=φi+0.55×rand(1,1),i=1,2 (7)
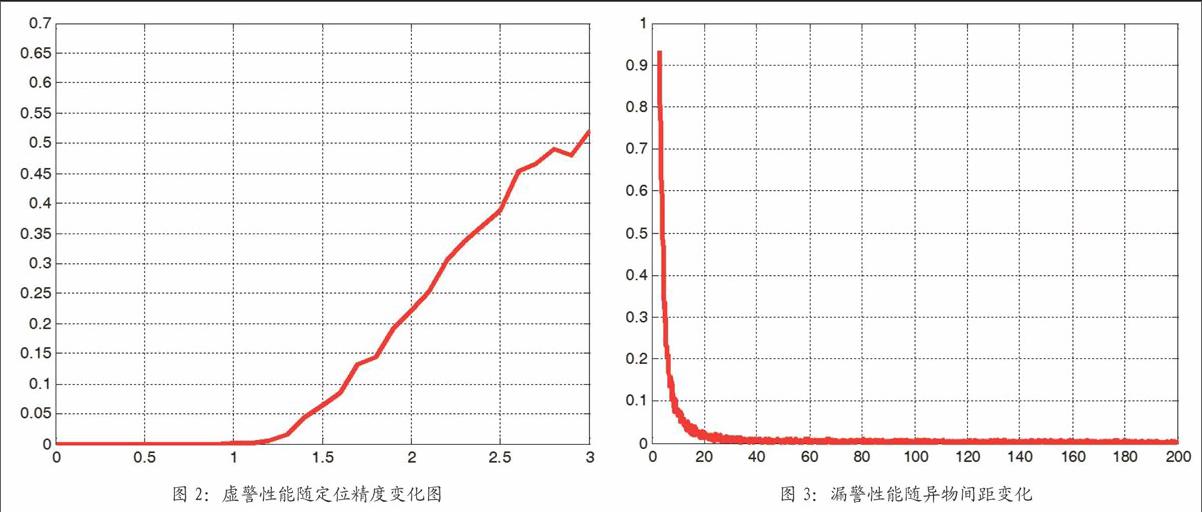
非差分式定位系统的最大定位精度为3米,差分式定位系统最大定位精度为厘米级,因此,在两次车辆定位坐标中还需引入定位误差,本文以0.1米为步长,计算0至3米的定位误差对整体系统虚警性能的影响,每个步长均取1000个随机样本点进行计算,即将前文的rand(1,1)替换为rand(1,1000)(rand(1,1000)表示取1000个小于1的随机数)。得到一张虚警性能随定位精度变化的图,如图2所示。
图中横坐标为定位精度,纵坐标为虚警率。从图中可以看出,当定位精度大于1.5米时,虚警精度已不能保证小于2%。因此,必须采用差分的定位系统才能保证系统整体的虚警率达到指标,即采用厘米级的差分定位系统,以20Hz的刷新率刷新定位数据,雷达方向位分辨率为20cm,雷达转角精度为0.05度,定向精度为0.05°的前提下,系统能够保证虚警率达到小于2%的指标。
2.2 系统漏警
漏警即目标信号低于检测门限,雷达不能识别目标,从而不对用户报警,发生漏检现象。系统漏警是系统层面上产生的,即雷达能够发现目标,然而由于整体系统误差的原因,导致监测处理机最终没能向用户报警的现象,称之为系统漏警。
该现象的产生是由于车辆行驶过程中,系统不断的检测并计算每次扫描到异物的位置。而异物位置的解算融合了雷达测距、定位数据、定向数据和雷达转角数据。这些数据由于存在误差,即使是同一个异物,每次解算的位置均有差异,故而需要设计门限值判断当前异物是已检测的异物亦或是新异物。
依据AC 150/5220-24 FAA咨询通告中的规定,相距3米的两个异物需能分辨,故取门限值为3米,若相距3米以外的两个异物识别为一个异物即发生漏警。
假设,第一个异物坐标为,第二个异物坐标为,雷达检测到该异物时,车辆实际位置坐标为(x,y),该位置处于距异物200米范围内的任意位置,即有:
(8)
雷达检测得第一个异物的距离为L1,检测得第二个异物的距离为L2,雷达检测到第一个异物的转角为θ1,检测到第二个异物的转角为θ2,车辆定向角度为φ。
由于单次测量时车辆定位、定向的误差相同,故不考虑车辆定位、定向误差。仅考虑雷达测距误差、雷达转角误差。雷达方向位的分辨率为20厘米,故可直接引入误差0.2×rand(1,1),即有:
Li=Li+0.2×rand(1,1),i=1,2 (9)
同理,引入雷达转角误差,即有:
θi=θi+0.05×rand(1,1),i=1,2 (10)
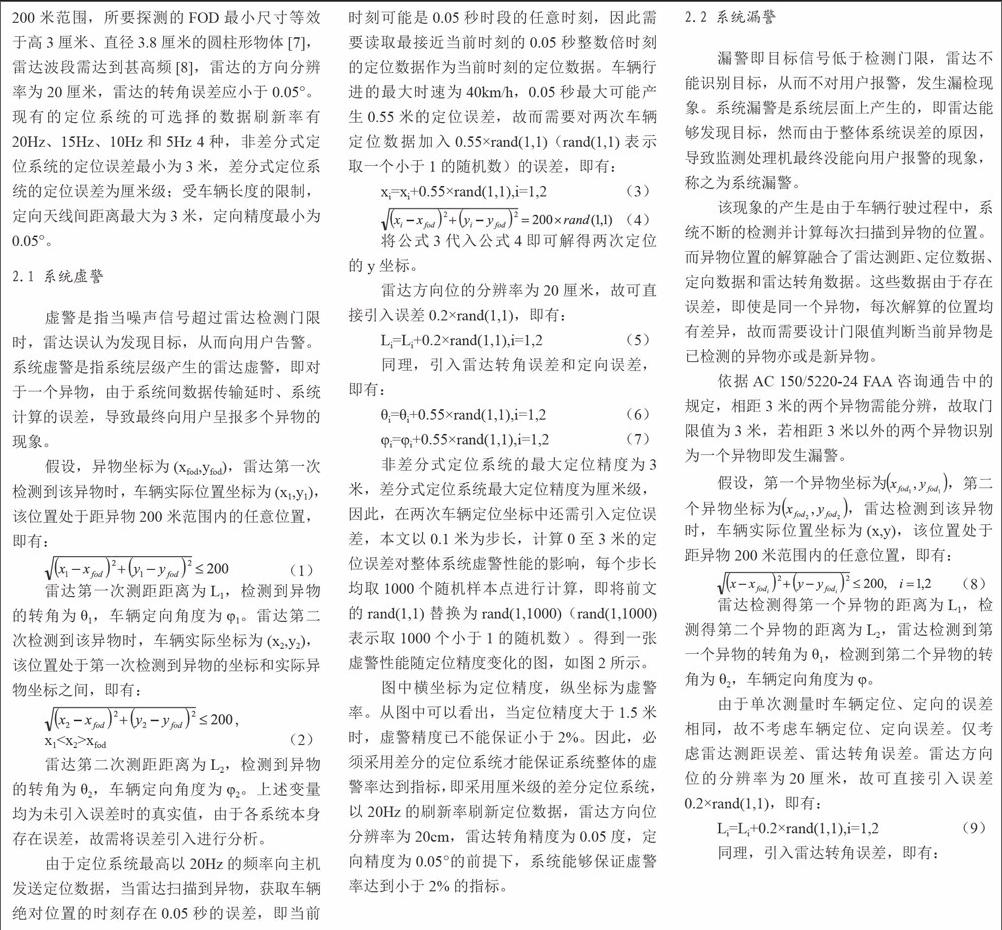
以0.1米为步长,计算3至200米间距的两异物发生漏警的概率,每个步长均取1000个随机样本点进行计算,即将rand(1,1)替换为rand(1,1000)。得到一张漏警性能随异物间距变化的图,如图3所示。
從图中可以看出,当两异物相距接近3米时,发生漏警的概率最大。由于两异物间距是随机的,其间距可能是3至200米(200米为雷达最大检测范围)中的任意值,故而可以根据以下公式统计:
其中,N表示两异物间距取样次数,i表示异物间距离,pi表示间距为i的两异物漏警率。得到最终结果P=1.66%,因此,该系统的漏警率可满足要求。
3 结论
经过上述的仿真和分析可知:采用厘米级的差分定位系统,以20Hz的刷新率刷新定位数据,雷达测距分辨率为20cm,雷达转角精度为0.05度,定向精度为0.05°的前提下,系统能够保证虚警率和漏警率达标,使系统可靠,满足系统的指标容差要求。
参考文献
[1]MHT 0020-2000,民用航空器材管理术语[S].北京:中国民用航空总局,2000.
[2]许桂梅.民航机场跑(场)道事故风险管理技术研究[D].南京:南京航空航天大学,2010.
[3]AC150/5220-24,FAA咨询通告[S].美国,FAA,2009.
[4]FOD防范手册[S].北京:民航局机场司民航局安全技术中心,2009.
[5]MH 5001-2006,民用机场飞行区技术标准[S].北京:中国民用航空总局,2006.
[6]MHT 5002-1996,民用机场特种车辆、专用设备配备[S].北京:中国民用航空总局,1996.
[7]AP-140-CA-2011-2,机场外来物管理规定[S].北京:中国民用航空局机场司,2011.
[8]MHT 4001.1-2006,甚高频地空通信地面设备通用规范第1部分[S].北京,中国民用航空总局,2006.
猜你喜欢
科学与财富(2016年28期)2016-10-14
中学课程辅导·教师教育(中)(2016年2期)2016-03-24
化学教学(2015年8期)2015-10-15
