串联式反后坐装置设计与动力学仿真
2017-05-03 07:04:08范林盛刘树华曹广群薛彦云张广辉
火力与指挥控制 2017年4期
范林盛,刘树华,曹广群,薛彦云,张广辉
(1.中北大学,太原030051;2.重庆长安工业公司,重庆401120)
串联式反后坐装置设计与动力学仿真
范林盛1,刘树华1,曹广群1,薛彦云2,张广辉2
(1.中北大学,太原030051;2.重庆长安工业公司,重庆401120)
利用Runge-Kutta方法确定了火炮串联式后坐系统的参数,设计出串联式反后坐装置结构,并运用ADAMS软件进行了串联式后坐系统动力学仿真,以验证设计结果的准确性。动力学仿真结果与结构设计的参数比较吻合,证明了结构设计结果的准确性,通过串联式后坐系统与单一后坐系统的对比,反映了串联式后坐系统的优越性。
串联式,反后坐装置,结构设计,ADAMS仿真
0 引言
现代战争形势下,首先投入战争的都是快速反应部队,轻型榴弹炮的机动性已经逐步超越火炮射程成为其更加重要的一个战术技术指标。相比大口径榴弹,中口径榴弹炮虽射程较小,但重量更轻,机动性更好,因此,对于中口径榴弹炮轻量化研究就尤为迫切。中口径榴弹炮身管相对短小,而为保证射击稳定性,较小的火炮全重又要求较长的后坐长度,在此情况下,单一后坐系统由于身管的导向部很长,身管显得很重,已经无法满足轻量化要求。串联式后坐系统则可以使得第一重后坐距离减小,从而缩短身管的导向部,减小身管的重量。将身管上减小的质量用来引入第二重后坐系统,可以在火炮后坐部分质量几乎不变的情况下,大幅减小作用于炮架的后坐力,这对于后续的炮架轻量化设计以及火炮总体布置奠定了良好的基础。
1 串联式后坐系统运动微分方程
串联式后坐系统包括由炮身以及第一重反后坐装置组成的第一重后坐部分和联接于第一重后坐部分的摇架以及第二重反后坐装置等部件组成的第二重后坐部分。火炮发射时,第一重后坐部分在炮膛合力的作用下沿第一层摇架后坐,后坐时受到第一重反后坐装置的后坐阻力。通过调节两层反后坐装置的复进机初力,可以使第二重后坐部分与第一重后坐部分同时后坐。当第一重后坐部分后坐到位后,第一重反后坐装置的制退机力变为0,后坐阻力只有复进剩余力,且在选定了复进机初力和压缩比之后,复进剩余力是可以确定的。若通过调整此时的第二重后坐阻力的大小,使得第一重后坐部分相对于第二重后坐部分的加速度方向沿着后坐运动方向,则第一重后坐部分在后坐阻力保持为复进剩余力不变的情况下相对第一层摇架静止,即第一重后坐部分与第二重后坐部分以相同的速度继续后坐。直到第二重后坐部分后坐到位后,两重后坐部分才开始一起复进。串联式后坐系统受力情况如图1所示。
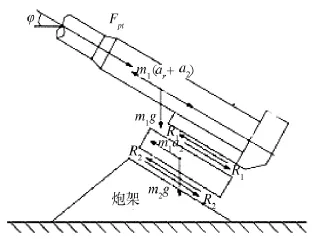
图1 串联式后坐系统受力图
图中以炮架为参考系,m1为第一重后坐部分的质量,m2为第二重后坐部分的质量;R1和R2分别为第一重后坐部分和第二重后坐部分所受的复进机力、制退机力、摇架导轨摩擦力及密封装置摩擦力之和,ar为第一重后坐部分相对于第二重后坐部分的加速度,a2为第二重后坐部分加速度。
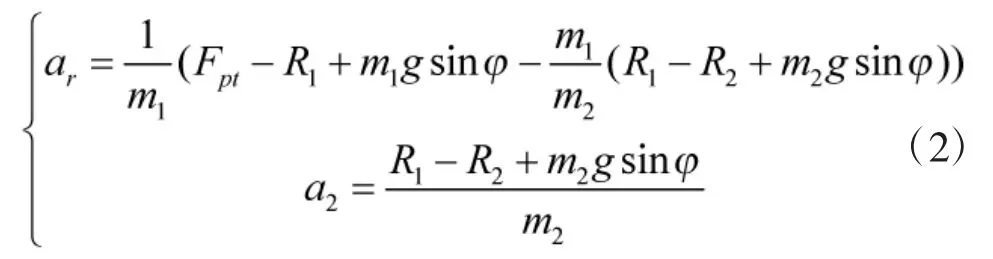
根据牛顿第二定律,可以得到

由式(1)可以分别求出ar和a2为:
将第一重后坐阻力与第二重后坐阻力表示为后坐阻力方程的标准形式即,

将式(3)代入式(2),可得

2 串联式后坐系统参数确定
串联式反后坐装置设计主要是确定后坐距离,一旦确定好后坐距离,问题就还原成通过调整两重反后坐装置的后坐阻力来满足后坐距离要求。在全炮总体尺寸允许的情况下,长的后坐距离意味着低的后坐力和轻的结构。为了减小火炮重量,第一重反后坐装置采用短节制杆式制退复进机,第一层摇架采用制退复进机外筒加强的摇架;第二重反后坐装置采用独立式反后坐装置,摇架选用筒形摇架。通过火炮发射过程的能量守恒关系可以求出两重反后坐装置需要提供的平均后坐阻力的估算值,后坐制动图的制定以平均后坐阻力为依据。
首先进行简单的声明:第一后坐距离表示第一重后坐部分相对于第二重后坐部分的后坐距离。第二后坐距离表示第二重后坐部分相对于组合摇架的后坐距离。两重反后坐装置的后坐制动图如图2所示。
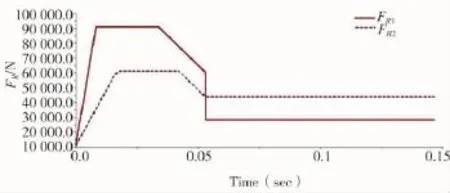
图2 两重反后坐装置后坐制动图
2.1 第一后坐距离的计算
第一后坐距离分两部分计算:①火药气体压力作用时期的移动距离;②火药气体停止作用后的移动距离。第一后坐距离是这两部分的移动距离之和。
利用MATLAB编写脚本文件,采取分段的Runge-Kutta方法求解上述常微分方程,通过限定vr不小于0来控制循环的结束,由此就得到了第一重反后坐装置的制退后坐诸元。
2.2 第二后坐距离的计算
第二后坐距离分两部分计算:①第一重后坐部分后坐到位时第二重后坐部分移动的距离;②两重后坐部分以相同速度后坐直至第二后坐速度变为0时第二重后坐部分移动的距离。第二后坐距离是这两部分的移动距离之和。
第一重后坐部分后坐到位后到第二重后坐部分后坐结束的第二后坐部分运动微分方程:
利用MATLAB编写脚本文件,采取分段的Runge-Kutta方法求解上述常微分方程,通过限定v2不小于0来控制循环的结束,由此就得到了第二重反后坐装置的制退后坐诸元。
根据第一、二两重反后坐装置的制退后坐诸元,进行第一重反后坐装置的制退复进机设计和第二重反后坐装置的复进机、制退机设计,并利用Solidworks软件绘制三维图,就可以完成串联式反后坐装置的初步设计。
图3 串联式后坐系统的组成
3 串联式反后坐装置的动力学仿真
通过ADAMS建立的复杂机械的运动学和动力学模型,在产品概念设计阶段进行辅助分析,对于设计的产品进行各项性能分析,从而达到缩短开发周期、降低开发成本的目的。
将串联式反后坐装置的三维模型导入ADAMS软件中,定义各个部件的质量特性值,添加约束和炮膛合力、第一重后坐阻力、第二重后坐阻力,在此第一、二重后坐阻力采用双向力的方式进行模拟,在制退复进机中的制退杆与后坐到位处的卡环之间添加接触。动力学仿真得到的后坐位移、速度曲线如图4、图5所示。
图4 第一重反后坐装置仿真结果与设计对比图

图5 第二重反后坐装置仿真结果与设计对比图
通过仿真结果发现,第一重后坐部分后坐到位后,第一重后坐部分相对于第二重后坐部分仍有很小的相对运动速度,这是由于制退复进机内部制退杆与制退筒的卡环相互接触作用产生的。在实际中,可以通过在制退复进机后坐结束部位添加蝶形弹簧来减小此设计误差。与此同时,由于第一重后坐部分与第二重后坐部分相互接触,第二重后坐部分也引起了一定的速度震荡,表现在第二重后坐部分速度时间曲线上,就产生了两个速度拐点。仿真结果与设计时的数据基本吻合,由此证明了设计结果的准确性。
4 串联式反后坐装置与单一反后坐装置的对比分析
在保证其他条件都相同的前提下,对于单一后坐系统和串联式后坐系统进行了对比分析,结果发现,相比单一后坐系统,串联式后坐系统使得传递到炮架的后坐力降低了20 000 N左右,但是后坐长度却增加了121 mm;由于第一重后坐长度仅为428 mm,相比单一后坐系统的后坐长度减少了817 mm,这样便可以大幅度减少身管导向部的长度。而且此时第一重后坐长度非常短,可以将炮身的圆柱面做成梯形,合理地解决了榴弹炮等膛压曲线变化较陡的火炮由于采用筒形摇架而造成的身管材料浪费问题,从而使后坐部分质量不至于因为引入两重后坐部分而增大。由于串联式后坐系统两重后坐部分同时后坐,虽然总的后坐长度相比单一后坐系统更长,但是后坐所用的时间却更短。
图6 单一后坐系统与串联式后坐系统后坐阻力曲线
将采用串联式反后坐装置的身管与54式122mm榴弹炮身管进行对比,选取同样密度的炮钢,在最大射程比后者大200 m情况下,身管质量却比后者轻10.2%,可以证明串联式后坐系统的合理性。
5 结论
串联式后坐系统在身管短小的超轻型中口径火炮上具有明显的优势。特别是在当前战争形势下,为了使火炮部队具备快速反应能力,不惜牺牲火炮射程来提高火炮的机动性,由此造成了火炮身管短小与后坐长度较长的矛盾,而串联式后坐系统在解决此矛盾时可以获得非常明显的效果。
[1]高树滋,陈运生,张月林,等.火炮反后坐装置设计[M].北京:兵器工业出版社,1995.
[2]GAO Y F,WU G D,ZHANG X X,et al.Dynamic simulation test of recoil mechanisms[J].Journal of Ballistics,2000,12(1):93-96.
[3]何永,郑建国,高树滋.二维后坐火炮分析及摇架设计[J].火炮发射与控制,2000(2):43-46.
[4]何永,王京鸣,张培忠,等.二维后坐火炮发射动力学研究[J].四川兵工学报,2000,21(2):12-15.
[5]谈乐斌,侯宝林,陈卫民.降低火炮后坐力技术概[J].火炮发射与控制学报,2006(4):69-71.
Design and Dynamic Simulation of Tandem Recoil Mechanism
FAN Lin-sheng1,LIU Shu-hua1,CAO Guang-qun1,XUE Yan-yun2,ZHANG Guang-hui2
(1.North University of China,Taiyuan 030051,China;2.Changan Industry Company,Chongqing 401120,China)
Runge-Kutta method is used to determine the parameters of artillery tandem recoil system,by structure design and dynamics simulation of tandem recoil mechanism,the accuracy of the design results can be verified.Dynamic simulation results are consistent with the parameters of structure design,the structure design accuracy is proved.By comparing tandem recoil system with single recoil system,the superiority of tandem recoil system can be reflected.
tandem type,recoil mechanism,structural design,ADAMS simulation
TJ81+.0 371
A
1002-0640(2017)04-0162-03
2016-02-14
2016-04-04
范林盛(1992-)男,山西晋中人,硕士研究生。研究方向:武器系统设计。
猜你喜欢
新技术新工艺(2022年12期)2022-02-14 07:32:18
小哥白尼(军事科学)(2020年2期)2020-06-16 03:11:04
舰船科学技术(2019年5期)2019-06-03 08:30:06
语文教学之友(2018年11期)2018-11-30 09:26:30
机械工程师(2018年6期)2018-06-14 06:12:28
小学教学参考(数学)(2018年4期)2018-05-29 09:22:28
中国新技术新产品(2017年2期)2017-01-20 20:19:15
山东工业技术(2016年21期)2016-11-24 17:25:32
兵器装备工程学报(2010年6期)2010-08-15 00:55:58
小哥白尼·趣味科学画报(2006年8期)2006-03-18 07:41:12