
新型航天电机去耦冗余结构设计探讨
2017-05-02 07:35:44张洪岩宁剑建宋振民于慧敏
微特电机 2017年5期
李 雨,张洪岩,宁剑建,宋振民,于慧敏
(中国电子科技集团公司第二十一研究所,上海 200233)
0 引 言
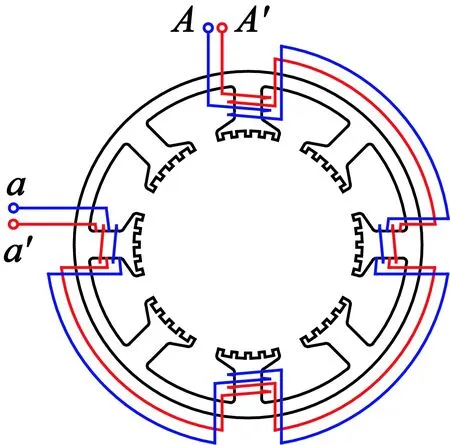
为确保航天飞行任务的成功,航天器平台及有效载荷均要进行可靠性设计。电机作为平台及有效载荷执行机构的关键元件,一旦失效将直接影响整机功能的实现,因此针对电机本身及其控制系统的可靠性设计就显得尤为重要,需要对电机及驱动器进行冗余设计。设计方法有2种,一种是采用2套单绕组电机及双驱动器方式,该设计使得系统重量显著增加;另一种方法是采用一套双绕组电机及双驱动器的冗余形式,双绕组电机设计如图1所示。

A-a为A相主绕组,A′-a′为A相备份绕组
由图1可知,因主备份绕组共用磁路,当主份绕组通过电流时,备份绕组则与之直接耦合,在备份绕组上的感应电势如下:
式中:M为电机主、备绕组互感;为电机主绕组电流。感应电势由2部分组成:前一部分为互感变压器电势,后一部分为运动电势。当主绕组工作时,备份绕组上产生的变压器电势将对备份驱动器产生冲击,严重时可击穿备份驱动器功率器件,降低了备份驱动器可靠性。目前解决办法是在备份绕组和备份驱动器之间加继电器断开,但是带来系统重量增加的问题。本文通过研究一种新型冗余结构设计,即去耦冗余结构设计,将主备份绕组之间的耦合电势消除,使其能够不通过继电器直接与备份驱动器连接。本文以航天步进电动机为例进行阐述,但不局限于步进电动机,其设计理念可引申到其它航天电机的冗余结构设计。
1 国外冗余设计结构
俄罗斯采用机械备份的方法,即用2个独立的电机轴系串联起来,如图2所示。这种冗余形式的优、缺点如表1所示。

图2 俄罗斯主、备份电机串联

优点缺点主电机断路,备份电机可不间断工作;主、备份电机之间无电、磁耦合问题。 轴向尺寸大大增大;一旦主电机出现机械故障(轴承失效,定、转子变形或因多余物卡死等),备份电机也将无法正常运行。
美国采用2种冗余形式:一种如图3所示,主、备份2套绕组同时绕在一个铁心上。这种冗余形式的优、缺点如表2所示。我国航天步进电动机普遍采用这种冗余形式。

(a) 主、备份绕组绕在同一铁心上
(b) 绕组接线示意图
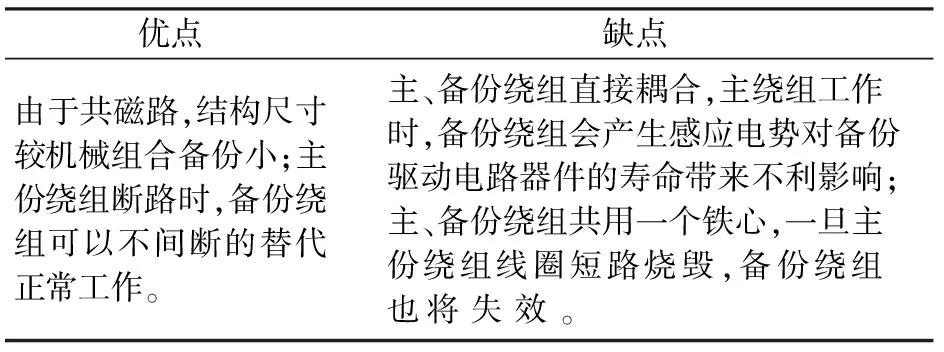
表2 美国冗余形式的优、缺点
另一种是Schaeffer公司提出的一种主、备份绕组铁心隔离的冗余形式,原理图如图4所示。这种冗余形式的优、缺点如表3所示。
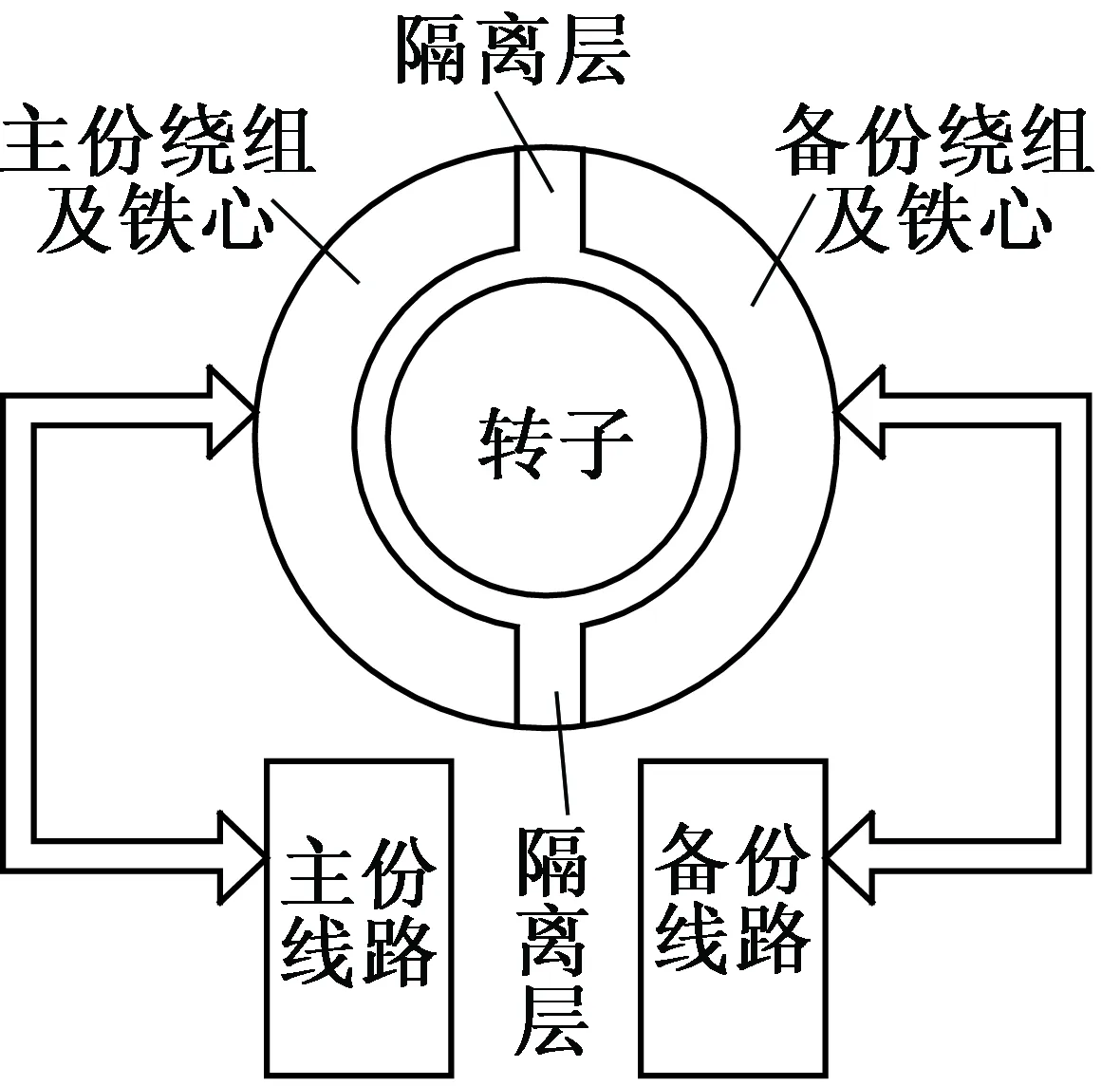
(a) 备份原理示意图

(b) 绕组备份形式示意图
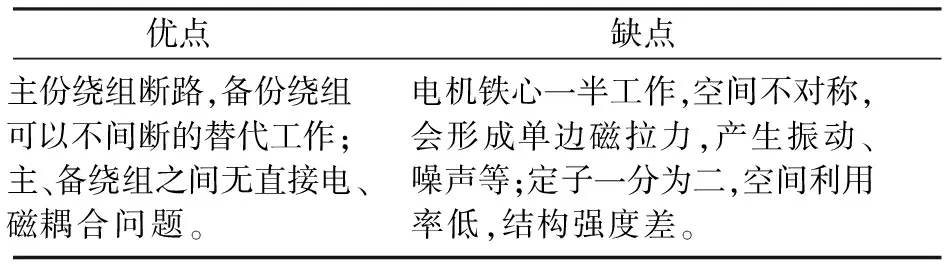
优点缺点主份绕组断路,备份绕组可以不间断的替代工作;主、备绕组之间无直接电、磁耦合问题。 电机铁心一半工作,空间不对称,会形成单边磁拉力,产生振动、噪声等;定子一分为二,空间利用率低,结构强度差。
图4中,A-a为A相主绕组,B-b为B相主绕组,A′-a′为A相备份绕组,B′-b′为B相备份绕组。
2 去耦冗余设计结构
本去耦冗余结构设计,首先在绕组备份方式上进行创新,具体设计如图5所示。这种结构使主、备份绕组不共磁极,且既可以解决电机主绕组局部温
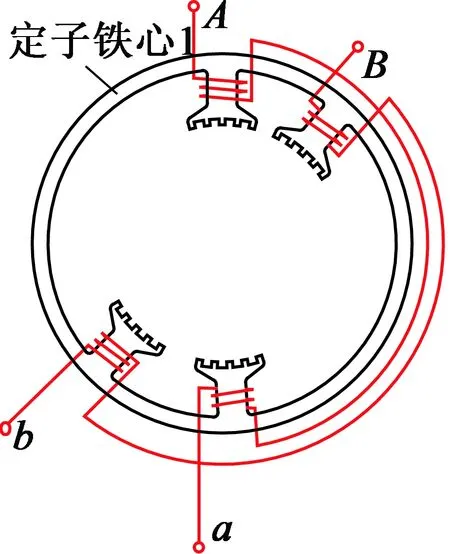
(a)

(b)
升过高导致备份绕组断路问题,又没有主、备份绕组直接耦合的感应电势问题,明显地提高了电机的可靠性。与美国Schaeffer公司的冗余设计形式相比,本冗余结构电机的电磁力径向对称,电机运行平稳。在电机冲片槽形不变(槽面积S)的情况下,该设计使得电机运行时同时作用的极数减半,但通过绕组参数调整,可确保电机力矩。传统步进电动机和本结构绕组设计参数对比如表4所示。

表4 传统步进电动机和本去耦冗余设计参数对比
其次,本去耦冗余结构的定子铁心不同于传统步进电动机,它由两段定子铁心拼接而成,如图6所示。两铁心之间采用隔磁片,实现了主备份绕组磁路完全物理隔离。
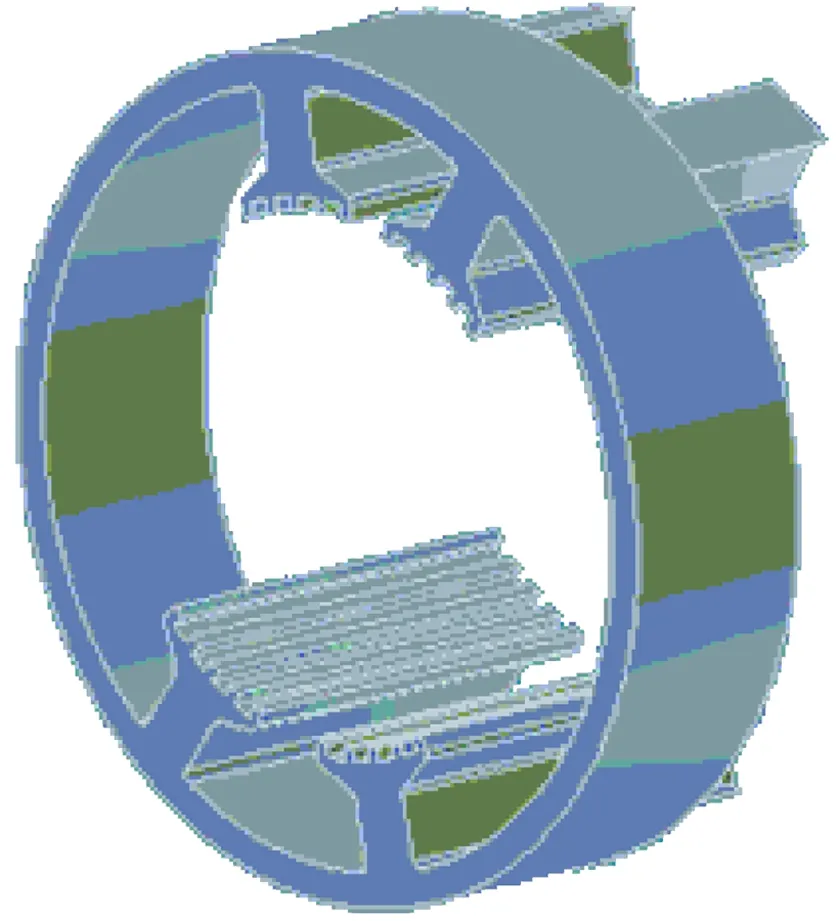
(a) 定子铁心1
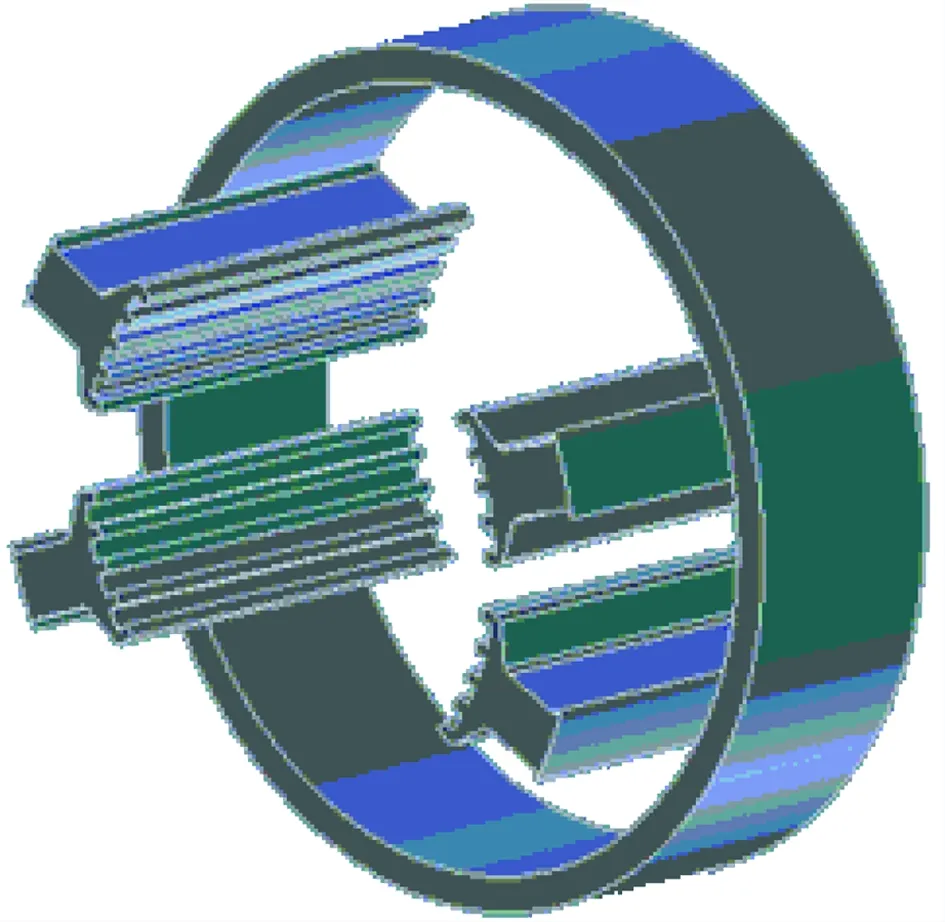
(b)定子铁心2

(c)两段定子铁心拼接示意图

(d)电机结构图
3 试验结果及分析
通过上述绕组冗余设计和定子铁心结构设计,消除了电机主备份绕组的直接磁耦合,提高了控制可靠性。样机耦合度的测试是按照主绕组通电运行,通过测试备份绕组感应电势计算所得。由于样机消除了备份绕组产生的变压器电势,其耦合度实为电机旋转产生的运动电势计算结果。研制样机性能测试数据如表5所示,可满足工程实际需要。
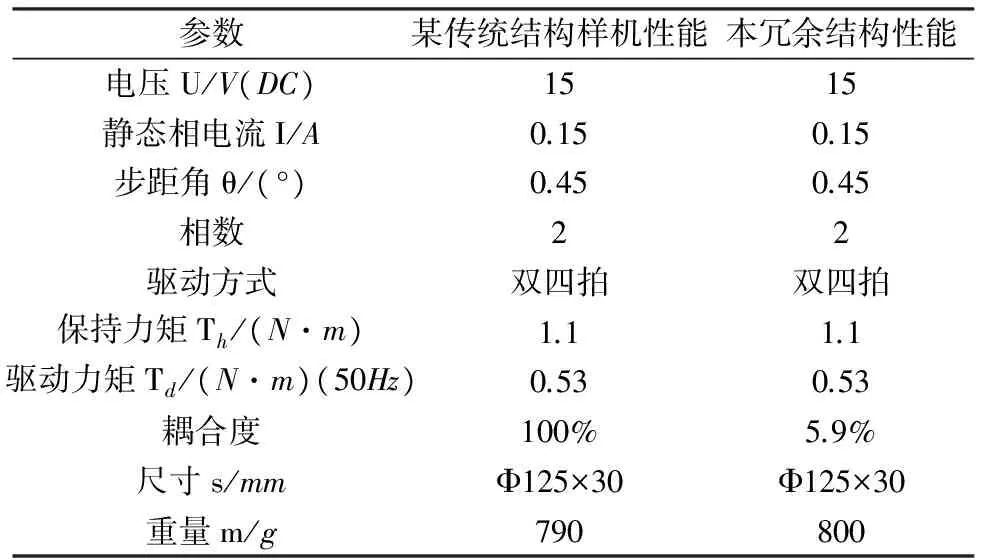
表5 去耦冗余结构样机性能参数
4 结 语
该去耦冗余结构与传统冗余结构相比,在电机功耗、体积均不增加的情况下,输出力矩相当,重量没有显著增加。但通过该新型去耦冗余结构的绕组设计和定子铁心设计,消除了主备份绕组的磁路耦合,降低了电机主绕组工作时,备份绕组产生的感应电势,提高了航天电机自身及驱动器的可靠性;同时,该结构无需采用继电器断开备份绕组与驱动器的连接,从而减轻了系统重量,具有工程实用价值。
[1] 王宗培,孔昌平.步进电动机及其控制系统(增量运动控制之二)[M].哈尔滨:哈尔滨工业大学出版社,1984.
猜你喜欢
防爆电机(2021年3期)2021-07-21 08:12:54
防爆电机(2020年4期)2020-12-14 03:11:02
电脑爱好者(2020年6期)2020-05-26 09:27:33
上海大中型电机(2017年3期)2017-11-13 03:38:46
中国环境监察(2017年8期)2017-10-23 05:25:24
光学精密工程(2016年5期)2016-11-07 09:06:04
电测与仪表(2016年18期)2016-04-11 11:29:46
上海电机学院学报(2015年3期)2015-02-28 14:29:52
计算物理(2014年2期)2014-03-11 17:01:41
新高考·高一物理(2012年5期)2012-04-29 20:27:57
