
水平式移动农情视频监视系统
2017-04-27 12:10王一涯牛涛陈曙光王宪菊
电脑知识与技术 2016年29期
王一涯 牛涛 陈曙光 王宪菊


摘要:为实现对大田农作物视频信息的实时观测,设计了可水平移动的农情视频监视系统。该系统由摄像头、控制电路、摄像头水平移动的机械承载装置、太阳能供电电源组成。摄像头安装在云台上,可实现对农作物的多角度,全方位的图像信息采集;控制电路使摄像头自动在机械承载装置上做水平往返移动;由于本系统应用于大田作物,不方便供电,可采用太阳能和充电电池双电源供电。经测试,本系统不但可以实现对农作物生长状态和环境实时监测,与传统的固定摄像头方法相比,减低了成本。
关键词:农情;单片机;控制电路;水平移动;视频监视
中图分类号:TP368 文献标识码:A 文章编号:1009-3044(2016)29-0241-02
1概述
现代农业力求广泛应用现代科学技术、智能设备和现代科学管理方法,实现优质、高产和安全的农业生产。在农业生产中应用物联网,通过实时图像传输和视频监控,可以直观的反应农作物生产的实时状態,有助于农业科研人员掌握农作物生长状态和生长环境,帮助农民及时发现问题,并且准确地确定发生问题的位置,这样农业将逐渐地从以人力为中心、依赖于孤立机械的生产模式转向以信息和软件为中心的生产模式。
目前,监测农作物生长状态最有效、最直观的方法是采用视频监视。农民可以在家通过电脑或手机了解农作物的生长状态和存在问题,并采取相应的补救措施。传统的农作物监测方法是在大田中布置多个摄像头,这种方法虽然简单,但是成本很高,成为制约农业物联网发展应用的最大因素。而本设计只需一个摄像头便可实现对大范围的农田进行巡回监视。这样,就大大地降低了成本,农民只需要花少量的钱就可以使用这些设备,为农民节省了开支,减轻了农民的负担。
2系统设计
2.1系统整体结构设计
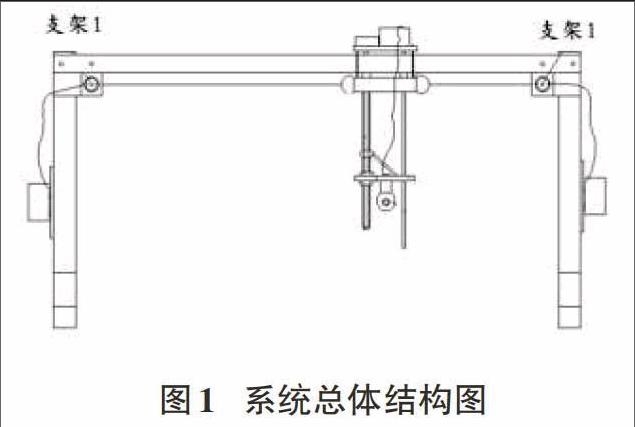
本研究中水平式农情视频监视系统有两部分组成,即水平移动承载结构和系统自动控制部分。水平式移动承载结构由支架、导轨、牵引绳索、摄像头、直流步进电机和控制箱组成;系统自动控制部分由控制器、通信模块、光敏传感器、限位开关、人机界面和供电电源组成。两端支架各安装一个控制箱,控制器通过无线通信模块进行通信,将导轨固定在两端支架上,导轨上安装可移动的摄像头,控制器通过限位开关检测摄像头位置以实现电机的正反转。从而可以实现摄像头在导轨上做水平往返移动。如图1所示。
2.1.1系统硬件设计
系统硬件部分主要包括单片机、光敏传感器、限位开关、无线通信模块、按键、LCD液晶显示和供电电源。如图2所示,单片机上电复位后,支架两端的单片机分别读取同一位置的限位开关状态,若其中任何一个控制器检测到限位开关为闭合状态,则将此信息通过无线通信模块发送给另一端的控制器,另一个控制器接收到信息后,首先应答此信息。两控制器通信成功后,协同工作,控制两个直流电机向同一个方向转动,从而可以实现摄像头在支架两端水平巡回移动。
光敏传感器用来检测大田中的光信息,根据当前大田光信息以判断当前为白天、黑夜或阴雨天气。光敏传感器将检测到的光信息转换为电压信号,若电压信号大于设置的上限值,则认为是晴天,系统正常工作;若电压信号缓慢下降,下降到低于设置的下限值,则认为是黑夜,摄像头返回当前运行方向的控制箱,停止工作;若电压信号突然下降,即电压的变化量超过一定的值,则认为是阴天,此时,摄像头高速返回控制箱,停止工作。
按键由三个按钮组成,分别为设置按钮,修改参数按钮。用来设置用户命令,包括电机的速度、运行过程中停止的次数和电机初始运行的方向等;LCD液晶显示可以实时显示当前电机的速度、运行方向和按键设置信息;当按下设置按钮后,液晶显示进入参数设置界面,这时可按修改参数按钮增加或减小电机运行速度和单次运行停靠次数。延时数秒后,无任何按钮被按下,LCD液晶显示自动跳转到运行界面,即实时显示当前电机运行速度和运行方向。
电机的运行速度由单片机向电机驱动电路发送不同的PWM值来控制,可实现电机的三挡调速,即低速、中速和高速。低速和中速为摄像头的正常移动速度,此模式下,摄像头移动较稳定,可减小视频信息的抖动,提高视频信息的清晰度。高速模式一般用在摄像头出现故障或供电不足的情况,使摄像头高速返回控制箱,进行充电。
由于该系统用于大田作物,空旷无遮挡,无线通信模块采用AS01-ML01DP5,该模块通信频段为2.4GHz,是一种高速、高稳定性、工业级的无线收发一体的数传模块,通讯距离可达2000米。与单片机采用SPI总线通讯。单片机与无线通信模块的电路图如图3所示。
2.1.2系统软件设计
系统的软件采用模块化思想,通用性比较好的C51语言编写。根据硬件电路对软件模块进行分组。主要分为按键处理模块、光敏传感器信息采集模块、限位开关采集模块、液晶显示模块、通信模块和电机驱动控制模块。上电复位后,系统首先判断按键是否按下,若按下,则调用按键处理子函数;若没有按下,系统自动进入正常运行模式。两个控制器通个采集限位信息来判断摄像头所在位置,根据摄像头所在位置,调用通信子函数,两控制器通信成功后,共同对电机驱动电路输出控制信号,以控制两个电机向同一方向运转,使摄像头向与当前闭合的限位开关相反的方向运行。同时液晶显示屏上显示出当前电机运行的速度和方向。控制器通过检测光敏传感器的信息来判断当前光照情况,若光信息值大于设定的上限值,摄像头正常工作,若光信息值低于设定的下限值,摄像头则回头当前运行方向的控制箱,停止工作。系统程序流程图如图4所示。
3结论
系统经过测试,完全符合设计目标。摄像头移动速度可进行三级控制,即低速、中速和高速,速度分别为0.5m/min、1m/min和1.5m/min。摄像头不但可以实现连续拍摄,还可定点拍摄。两支架之间距离长达1km,两通信模块之间通信正常。摄像头可实现在白天两支架之间安全稳定运行,晚上或阴雨天气,摄像头自动回到控制箱中。
猜你喜欢
南方农业(2021年16期)2021-12-25
电子制作(2019年13期)2020-01-14
电子制作(2019年15期)2019-08-27
汽车维护与修理(2019年3期)2019-08-08
电子制作(2019年9期)2019-05-30
汽车维护与修理(2018年5期)2018-09-29
汽车维护与修理(2018年23期)2018-07-03
汽车维护与修理(2017年5期)2017-11-17
湖北师范大学学报(自然科学版)(2015年3期)2015-12-05
电子设计工程(2015年15期)2015-02-27
