
高动态金属壳谐振陀螺进动特性分析
2017-04-26 01:34邓志红
导航定位与授时 2017年2期
刘 宁,邓志红
(1.北京信息科技大学高动态导航技术北京市重点实验室,北京100101; 2.北京理工大学自动化学院,北京100081)
高动态金属壳谐振陀螺进动特性分析
刘 宁1,邓志红2
(1.北京信息科技大学高动态导航技术北京市重点实验室,北京100101; 2.北京理工大学自动化学院,北京100081)
高动态金属壳谐振陀螺的进动特性,是敏感结构实现角速率信息有效提取的关键。针对金属壳谐振陀螺的进动特性进行研究,首先分析了金属壳谐振陀螺的总体研究思路,明确其工作原理;建立敏感结构的动力学方程和进动因子表达式;利用数值分析方法,对进动因子进行分析,得出金属壳谐振陀螺进动因子经验公式;最后对其进动特性进行综合分析。
高动态金属壳谐振陀螺;敏感结构;哥氏定理
0 引言
金属壳谐振陀螺因其采用合金材料作为谐振子,具有结构强度高、抗过载能力强的优点,在兼顾抗过载、量程和精度上表现出了巨大的潜力[1-8]。有部分文献将金属壳谐振陀螺、半球谐振陀螺归属于固体波动陀螺范畴[6-7],这种分类方式与上述分类方式只是形式不同,在原理上相通。金属壳谐振陀螺是目前能够有效解决大量程、高过载环境下角速率测量的重要传感器。
在文献[6]和文献[7]中,作者对于半球壳进行研究时,给出了半球壳的进动因子。但对于半球壳而言,其振型函数形式单一,与半球壳的结构参数无关,故所推导的进动因子表达式与半球壳谐振子结构参数无关。而在文献[4]中,作者经过大量的研究,利用弹性力学中的虚功、虚位移原理,给出了半球壳谐振子、圆柱壳谐振子的进动因子表达式,并分析了两者结构参数与对应进动因子间的关系,总结出了经验公式。在文献[9]中,作者利用弹性力学中的能量原理,通过拉格朗日方法,给出了旋转壳体的进动因子推导方式。综合这三种推导方式可知,这类轴对称谐振壳的进动因子应小于1,其数值应与结构参数有关。
本文分析结构参数与钟形振子进动因子间的关系,研究金属壳谐振陀螺敏感结构的振型进动特点,推导出敏感结构的等效进动因子表达式。
1 金属壳谐振陀螺特点
由金属壳谐振陀螺的研究现状可知,传统的金属壳谐振陀螺的量程、抗过载能力受到自身结构制约,无法满足高过载、大量程条件下的角速率测量要求。针对这一问题,受中国传统大钟启发,借鉴国内外相关金属壳谐振陀螺的设计经验,创新性地提出了高动态金属壳谐振陀螺。该陀螺利用高品质的恒弹性合金材料一体加工而成,核心敏感部件为敏感结构,由3个典型主体结构:半球面形结构、圆柱面形结构、旋转双曲面形结构融合而成,利用压电激励与检测方式进行控制与角速率解算,在保证精度的前提下,显著地提高了该陀螺的抗过载能力和量程。
高动态金属壳谐振陀螺是受中国传统大钟启发而来,中国传统大钟在振动过程中,声色优美、余音袅袅且经久耐用[10-11]。将这些特点与传统的金属壳谐振陀螺相结合,来提高金属谐振子振动稳定性、增强抗过载能力、增大测量量程等。
高动态金属壳谐振陀螺由敏感结构、压电电极、电路系统和陀螺框架组成。敏感结构是高动态金属壳谐振陀螺的核心敏感元件,主要是提供稳定的驻波振动载体,从结构上保证陀螺能够有效检测输入角速率;压电电极是敏感结构与陀螺之间的桥梁,主要负责敏感结构的振型控制以及信号检测,从而将敏感结构振动信号转化为电信号用于数据处理;电路系统用于输出控制信息,同时采集检测信息,最终计算出输入角速率;陀螺框架用于固定敏感结构、压电电极和电路系统,提供高动态金属壳谐振陀螺的对外信号输出与机械安装。
敏感结构是高动态金属壳谐振陀螺的核心敏感部件,其结构形如中国传统大钟,主体结构包括3个部分:半球面形结构、圆柱面形结构、旋转双曲面形结构,是一个轴对称多曲面融合金属回转体结构,绕其角速率敏感轴对称,如图1所示。将压电电极均匀粘贴在钟壁上,控制敏感结构振型,检测驻波进动,利用电路系统检测输入角速率。

图1 敏感结构示意图Fig.1 Sensitive structure schematic diagram
与传统的金属壳谐振陀螺相比,高动态金属壳谐振陀螺具有以下特点:
1)抗过载能力强。借鉴中国传统大钟的结构设计形式,利用轴对称多曲面融合结构,有效提升高动态金属壳谐振陀螺的抗过载能力。
2)测量范围宽。传统的轴对称壳谐振陀螺利用振子底部改变厚度来调节谐振子刚度,例如Innalabs公司的圆杯形陀螺,将底部厚度调节为圆杯标准壁厚的2倍来增加谐振子刚度。而高动态金属壳谐振陀螺是通过修改钟口处曲面结构形式,来调节敏感结构刚度,使得振子具有较广的进动范围。
3)结构稳定性高。传统的轴对称壳谐振陀螺采用单一曲面结构作为敏感结构,例如圆柱面、半球面、圆锥面等标准曲面结构。而高动态金属壳谐振陀螺采用多曲面融合结构作为敏感结构,包括半球面、圆柱面、旋转双曲面结构。通过优化各结构间尺寸,提高敏感结构结构稳定性。
综上所述,高动态金属壳谐振陀螺摒弃了传统轴对称壳谐振陀螺的设计思路,利用多曲面融合思想,设计敏感结构。敏感结构与传统振子相比,曲面结构更为复杂,振动特性特征丰富。因此,对敏感结构的相关理论需进行系统研究,数学模型、振动特性、信号处理方法还需进行大量理论分析与实验摸索,整体性能还需进一步分析与验证。
2 工作原理
高动态金属壳谐振陀螺是利用敏感结构表面的驻波进动效应,来敏感输入角速率。主要过程为:利用钟壁上压电电极的逆压电效应激励出敏感结构的驱动模态,通过哥氏力的耦合作用激励出检测模态,进而利用压电电极的压电效应检测出驻波进动,最后输出的电特性信号经过信号处理,解算出输入角速率[12]。
在敏感结构的钟壁上,均匀布置4对压电电极,如图2所示,分别为1对激励电极、1对检测电极、1对反馈电极和1对阻尼控制电极。利用压电材料的逆压电效应,来激励敏感结构振动,使敏感结构底部的惯性质量部分——钟唇,在环向上产生四波腹振动的驻波形式,如图3(a)所示,定义这种振动模态为激励模态,或称主模态。对于这种轴对称壳来说,同一振动频率下会有两种固有振型,这两种振型相差45°,如图3(b)所示,定义这种振动模态为检测模态,或称第二模态。而这两种振动模态形成的相差45°的振型,通过哥氏力进行耦合。

图2 敏感结构压电电极分布图Fig.2 Piezoelectric element of sensitive structure

(a)激励模态(a) Excitation mode

(b)检测模态(b) Detection mode图3 敏感结构钟唇驻波示意图Fig.3 Standing wave of sensitive structure
具体实施过程中,压电电极应摆放在远离自由端,靠近约束端的位置,尽可能地减少由于自由端受哥氏力作用而影响压电电极检测的效果。首先,在激励电极上施加交流信号uinput,压电电极沿长度方向发生变化,产生驱动力,如图4(a)所示;相应质点在该驱动力的作用下,沿垂直于钟壁方向上产生运动,如图4(b)所示,最终激励敏感结构工作于四波腹振型。

(a)压电电极驱动力(a) Piezoelectric element excitation force
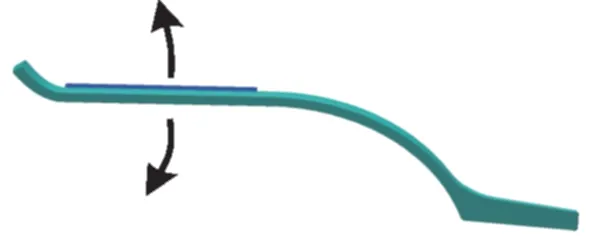
(b)敏感结构质点运动 (b) Motion of sensitive structure图4 激励电极作用示意图Fig.4 Drive piezoelectric element
当敏感轴方向上无角速率输入时,敏感结构在激励电极的驱动下,维持在激励模态下振动;当敏感轴方向上存在输入角速率时,在哥氏力的耦合作用下激励出检测模态,且该模态下振型的振动幅值应正比于输入角速率。而2个模态均作用于敏感结构上,就会引起原有的四波腹振型发生偏转,或描述为驻波发生了进动。在实际工作时,当敏感轴方向上存在逆时针方向的角速率Ω时,驻波产生进动,其振型进动角为ϑ,正比于输入角速率Ω,如图5所示。
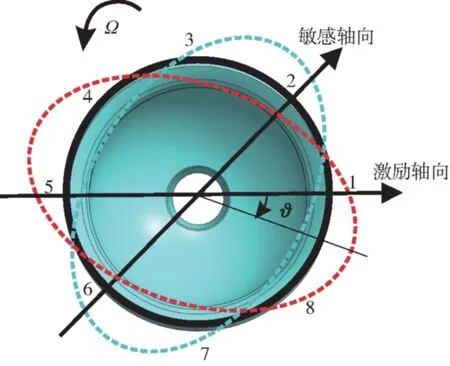
图5 敏感结构驻波进动示意图Fig.5 Precession of standing wave
3 动力学方程描述
将敏感结构各点的运动看作是质点的运动,在正交曲线坐标系下,各质点均存在3个坐标方向上的位移。对于敏感结构上的一个质点P(φ,υ,θ),其矢量运动形式可表示为

(1)

Ω2uφcos2φ-Ω2uυcosφsinφ)
Ω2uυsin2φ-Ω2uφsinφcosφ)

Ω2uθ-Ω′uφcosφ-Ω′uυsinφ)
(2)
其中,ρ1和ρ2为正交曲线坐标系下的2个曲率半径,ρ1为主曲率半径,ρ2为第二曲率半径,φ为质点法线与旋转轴间夹角,θ为环向角度,υ为钟形振子的厚度方向坐标。在钟形振子中,φt表示顶部夹角,φb表示底部夹角,h为钟形振子的厚度。根据上述表示,则质点P的整体位移的合成矢量表示为[14]

(3)
当敏感轴向上存在外界输入角速率Ω时,其相对于惯性空间的表达式为

(4)
根据哥氏定理和瓦里斯公式,质点P相对惯性空间的绝对加速度为[13]
a=a0+2Ω×R′+R″+[Ω′×R]+[Ω×[Ω×R]]
(5)
其中,a0为质点P的绝对加速度;R″为质点P的加速度;R′为质点P的速度;Ω′为质点P的角加速度。
将式(5)展开,可得

Ω2uφcos2φ-Ω2uυcosφsinφ

Ω2uυsin2φ-Ω2uφsinφcosφ

(6)
式中,aφ为φ方向上的加速度,aυ为υ方向上的加速度,aθ为θ方向上的加速度。则由牛顿第二运动定律可知,质点P所受在外界角速率影响下的惯性力为
fφ=-ρaφ,fυ=-ρaυ,fθ=-ρaθ
(7)

4 进动特性
4.1 进动因子与结构参数
求解式(2),即可求解出敏感结构进动因子表达式为[14]
(8)
其中,U、V、W为振型函数。于是可得
K=κ(R,S,Rb,h)
(9)
其中,κ(R,S,Rb,h)为关于结构R,S,Rb,h的函数。由此可知,进动因子仅与半球面形结构半径、旋转双曲面形结构底部半径、旋转双曲面形结构高度和厚度有关,与圆柱面形结构高度无关。
结合式(8),利用数值仿真分析方法,分析敏感结构数对进动因子的影响,如图6所示。从图6中可以看出,进动因子随着半球面形半径、旋转抛物面形底部半径和敏感结构厚度的增加而减小,随着旋转抛物面形高度的增加而变大;且敏感结构的进动因子,趋于一个常值0.6。而从旋转抛物面形底部半径变化关系来看,当半径增大时,其进动因子减小,敏感结构的底部趋向于圆环状,其值应该趋近于圆环的进动因子。综合文献[4]和文献[6],半球面形振子的进动因子趋近于0.4,圆柱面形振子的进动因子趋近于0.8,圆环的进动因子趋近于0.3。对于敏感结构而言,进动因子趋近于0.6,在圆柱与半球之间。于是可得敏感结构进动因子的经验公式为
(10)

(a)进动因子与半球面形半径(a) Precession factor and radius of hemispherical

(b)进动因子与旋转抛物面形底部半径(b) Precession factor and radius of parabolidal

(c)进动因子与旋转抛物面形高度(c) Precession factor and height of hemispherical

(d)进动因子与敏感结构厚度(d) Precession factor and weight of hemispherical图6 进动因子与敏感结构参数间的关系Fig.6 Relationship of precession factor and sensitive structure
4.2 特性分析
在理想情况下,敏感结构的振型进动反映在刚性轴系p轴和q轴的变化上,如图7所示。该图为
p轴和q轴的李萨茹图,利用这种表现方法能够方便验证与测试敏感结构的振型进动。如果敏感结构的钟唇运动为纯的驻波,当输入角速率为0时,振型未产生进动,没有发生偏转,故p轴和q轴所绘制的李萨茹图为一条直线。而当振型偏转0.05π时,李萨茹图所呈现出的水平线变为与水平轴呈现0.1π夹角的斜线,而此时驻波相对于陀螺壳体移动了-30°。
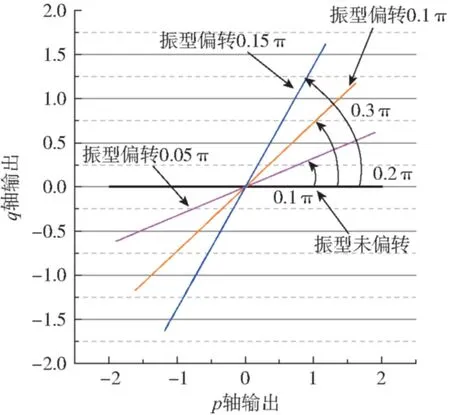
图7 固有刚性轴系输出李萨茹图Fig.7 Lissajous curves of rigid axis
而对于敏感结构整体驻波的包络而言(图8),当振型偏转0.05π时,整体驻波包络偏转0.05π。

图8 驻波进动包络示意Fig.8 Envelope of standing wave
而在非理想情况下,敏感结构在加工过程中以及材料的差异,会产生振型偏移,从而导致p轴和q轴产生相位差,使得李萨茹图变为椭圆,如图9所示。

图9 非理想情况下李萨茹图Fig.9 Lissajous Curves of axis imperfect
综上所述,敏感结构的振型进动与传统金属壳谐振子一致,只是进动因子有所差别。在进行角速率信息获取时,均需要通过对p轴和q轴的信息进行获取,从而有效分析敏感结构振型进动。
5 结论
针对金属壳谐振陀螺的进动特性进行研究,首先分析了金属壳谐振陀螺的总体研究思路,明确其工作原理;建立敏感结构的动力学方程和进动因子表达式;利用数值分析方法,对进动因子进行分析,得出金属壳谐振陀螺进动因子经验公式;最后对其进动特性进行综合分析。本文对金属壳谐振陀螺的设计与制造提供了设计依据。
[1]ArmeniseMN,CiminelliC,Dell′OlioF,etal.Advancedingyroscopetechnologies[M].Berlin:Springer, 2013: 1-30.
[2]LynchDD.Coriolisvibratorygyros[C].ProceedingsoftheSymposiumonGyroTechnology, 1998.
[3]IEEE1431-2004.IEEEstandardspecificationformatguideandtestprocedureforcoriolisvibratorygyros[S].NewYork:InstituteofElectricalandElectronicsEngineers, 2004.
[4] 樊尚春.轴对称壳谐振陀螺[M].北京: 国防工业出版社, 2013.
[5] 刘宇.固态振动陀螺与导航技术[M].北京: 中国宇航出版社, 2010.
[6]B.A.马特维耶夫,B.И.利帕特尼科夫,A.V.阿廖欣, 等.固体波动陀螺[M].杨亚非, 赵辉, 译.北京: 国防工业出版社, 2009,
[7] 马特维耶夫.固态波陀螺仪导航系统[M].马菊红, 译.哈尔滨: 哈尔滨工业大学出版社, 2013.
[8]ShkelAM.TypeIandTypeIImicromachinedvibratorygyroscopes[C].Position,Location,AndNavigationSymposium, 2006IEEE/ION.IEEE, 2006: 586-593.
[9]JoubertSV,ShatalovMY,FayTH.RotatingstructuresandBryan’seffect[J].AmericanJournalofPhysics, 2009, 77(6): 520-525.
[10] 徐永君, 战颂, 申仲翰, 等.永乐大钟及悬挂支撑系统的撞钟过程瞬态分析[J].振动与冲击, 2007, 26(5): 141-144.
[11] 郑敏华, 蔡秀兰, 陈通.永乐大钟振动的有限元分析[J].声学学报, 1988, 13(1): 59-66.
[12] 刘宁, 苏中, 刘洪.钟形振子式角速率陀螺敏感机理与检测方法[J].哈尔滨工程大学学报, 2013, 34(6): 721-727.
[13]ShatalovMY,JoubertSV,CoetzeeCE,etal.Freevibrationofrotatinghollowspherescontainingacousticmedia[J].JournalofSoundandVibration, 2009, 322(4): 1038-1047.
[14]LiuN,SuZ,LiQ.Designandexperimentofanovelbell-shapedvibratorygyro[J].SensorsandActuatorsA:Physical, 2016, 238: 37-50.
Analysis of Precession Features for High Dynamic Metal Shell Vibratory Gyroscope
LIU Ning1, DENG Zhi-hong2
(1.Beijing Key Laboratory of High Dynamic Navigation Technology, Beijing Information Science & Technology University, Beijing 100101, China; 2.School of Automation, Beijing Institute of Technology, Beijing 100081, China)
The precession feature of high dynamic metal shell vibratory gyroscope is the key to realize the angular rate information extracted effectively.It focuses on the precession of metal shell vibratory gyroscope.Firstly, the overall research ideas of metal shell vibratory gyroscope and working principle are analyzed.Then the sensitive structure dynamics equations and the expression of precession factor are proposed.The method of numerical analysis is used to analyze the precession factor.The metal shell vibratory gyroscope precession factor empirical formula is achieved.Finally, the precession characteristics of the metal shell vibratory gyroscope are analyzed comprehensively.
High dynamic metal shell vibratory gyroscope; Sensitive structure; Coriolis theorem
2017-01-28;
2017-02-27
国家自然科学基金(61471046);北京市教委市属高校创新能力提升计划项目(TJSHG201510772017);高动态导航技术北京市重点实验室开放课题。
刘宁(1986-),男,博士,助理研究员,主要从事谐振陀螺、惯性器件和高动态IMU的研究。 E-mail:ning.liu@bistu.edu.cn
10.19306/j.cnki.2095-8110.2017.02.015
TP212.1
A
2095-8110(2017)02-0086-07
猜你喜欢
电工技术学报(2022年20期)2022-10-29
工业建筑(2022年2期)2022-06-29
兰州交通大学学报(2022年2期)2022-04-26
能源工程(2021年5期)2021-11-20
铁路技术创新(2020年6期)2020-02-25
小学生学习指导(低年级)(2019年10期)2019-10-16
电子制作(2019年7期)2019-04-25
学生天地(2019年6期)2019-03-07
军事文摘(2018年24期)2018-12-26
空气动力学学报(2018年6期)2018-12-03
