
基于工况的PHEV模糊自适应控制策略研究
2017-04-26 01:12:46陈慧茹郭建华初亮
汽车技术 2017年4期
陈慧茹郭建华初亮
(1.长春市机动车排气汚染管理中心,长春 130022;2.吉林大学 汽车仿真与控制国家重点实验室,长春 130022)
基于工况的PHEV模糊自适应控制策略研究
陈慧茹1郭建华2初亮2
(1.长春市机动车排气汚染管理中心,长春 130022;2.吉林大学 汽车仿真与控制国家重点实验室,长春 130022)
基于智能交通系统(ITS),提出了基于工况的PHEV模糊自适应控制策略。通过ITS获取未来路径的速度特征进行模糊智能控制,基于工况的模糊自适应控制策略通过合理分配电池电量来提高PHEV的经济性。利用是imulink和Cruise搭建了系统仿真模型,对仿真油耗结果进行了对比分析。结果表明,基于工况的模糊自适应控制策略能够根据行驶工况的特征参数合理分配电池电量,从而提高了PHEV的经济性能。
1 前言
目前,插电式混合动力汽车(Plug-in Hybrid Elec⁃tric Vehicle,PHEV)的能量管理策略大多基于规则的控制策略[1~3],PHEV驱动模式分为电量消耗阶段(Charge Depleting,CD)和电量维持阶段(Charge Sustain⁃ing,CS)。基于规则的控制策略具有很强的鲁棒性和良好的实时性能,易于实现。然而,这种控制策略对行驶工况的适应性较差,当PHEV在CS模式下驱动时,需要启动发动机并且其工作在低效区域中,导致油耗增加。为解决此问题,Eason和Noble[4]开发了一种基于动态规划(DP)的混合动力客车控制策略,并建立了神经网络模型来预测未来的行驶速度,仿真结果表明,该策略可以提高混合动力客车7%的燃油经济性,但该算法较复杂,并且必须已知行驶工况。
本文基于智能交通系统(Intelligent Traffic System, ITS),提出了基于工况的PHEV模糊自适应控制策略,借助ITS获取未来行驶路径的速度分布,根据行驶工况信息,通过合理分配电池电量来提高PHEV的燃油经济性。
2 PHEV构型
本文研究的PHEV构型为同轴并联式,如图1所示。电机安装在机械式变速器(AMT)与离合器之间。发动机、电机和机械式变速器由电控单元(ECU)进行协调控制。其动力传动系统基本参数如表1所列。

图1 PHEV构型
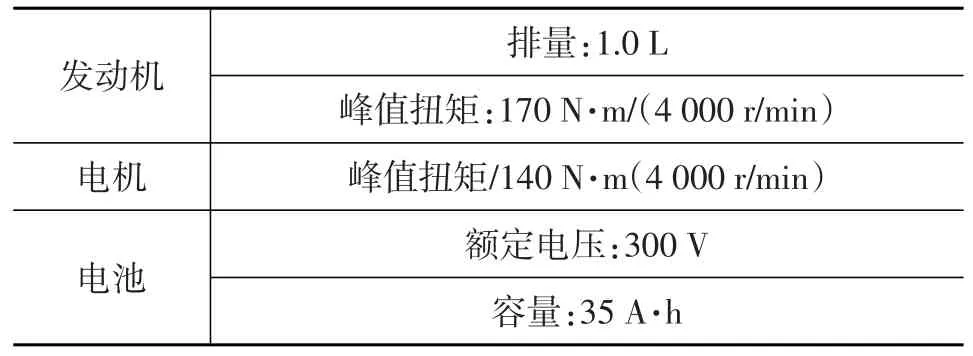
表1 PHEV动力传动系统基本参数
3 基于工况的模糊自适应控制策略
3.1 控制策略架构
本文提出的基于工况的模糊自适应控制策略架构如图2所示。

图2 控制策略架构
该控制策略的控制原理如下:
玉米种子、燕麦种子和光叶紫花苕种子价格分别为15.0,2.0和2.0元/kg。肥料支出包括基肥和追肥的费用。青贮玉米收获后加工调制青贮料,成本价为0.186元/kg;混播牧草收获后晾晒制成青干草,成本为1.25元/kg(表2)。
a.首先,驾驶员通过GPS输入目的地,GPS计算行驶路径,并将路径的数据发送到ITS(图3a)。ITS的实时交通系统监测各路段交通速度(图3b),然后将速度信息发送到数据处理器(图2)。
另一种情况下,当ΔVmi的隶属度函数为dV1并且SOC的隶属度函数为S5时,需求功率中的电机功率的比例增加,而且发动机几乎不参与车辆的驱动。在这种情况下,由于速度较低,发动机的工作点远离高效区域。
该软件的部分功能涉及学生隐私,在当前大学生对学生管理工作高度敏感的时代,需要给予他们一定的空间。比如定位功能的使用,学生比较在意行踪的隐私性保护。因此,此功能若无限无度使用易造成学生的排斥心理。
b.数据处理器计算每个区间的平均速度Vmi和整个路径的平均速度Vm,得到平均速度差ΔVmi=Vmi-Vm。
c.将平均速度差ΔVmi和当前SOC作为模糊控制器的输入,基于文中所述的模糊规则计算电机转矩阈值“[Trq_Gap]”和电机驱动速度阈值“[v_EV_Gap]”。
d.根据“[Trq_Gap]”和“[v_EV_Gap]”,基于规则的控制器(图2)调节PHEV的驱动模式,计算发动机转矩Te和电机转矩Tm。
预制光缆余长主要来自于双端预制光缆,对于单端预制光缆,冗余较长光缆可进行现场裁剪,无需考虑收纳空间。预制光缆可分为分散配线方式和预制舱内集中配线方式。
由上述分析可知,根据ITS的实时交通数据,基于工况的模糊自适应控制策略能够通过智能地分配发动机功率和电机功率达到合理地规划使用电池功率。
在实验课上,教师也可适时提出问题,激发学生探求欲.比如,在讲解“盐类水解”相关知识时,笔者要求:现有滴管、试管、CH3COONa、Na2CO3、CH3COOH、石蕊试液,试对醋酸进行酸性验证,并对碳酸、盐酸、醋酸的酸性强度进行比较.大多数学生都能够解决验证问题,但无法想出合适方案判断酸性强度.而在笔者提示当CH3COONa与石蕊试液相溶后会变蓝后,学生似乎寻找到了路径,都跃跃欲试.

图3 实时交通系统和平均速度数据
3.2 模糊自适应控制器
贵州墨:观赏石界称为盘江黑珍珠,主要产于兴义、罗甸一带的南北盘江、红水河流域;石质多为水冲深色石灰岩,系观赏石中的珍品;兴义被中国观赏石协会评为观赏石之乡。由于长年无序开采,储量已近枯竭。
模糊控制是一种通过模仿人的思维方式实现智能控制的一种控制方法[5,6],非常适合于PHEV/HEV能量管理的非线性问题[7~9]。为了达到更好的实时性和鲁棒性,本文利用MATLAB的模糊逻辑工具箱来建立模糊自适应控制器。
转矩分配模块计算发动机转矩Te和电机转矩Tm。在联合驱动模式下,计算式为:
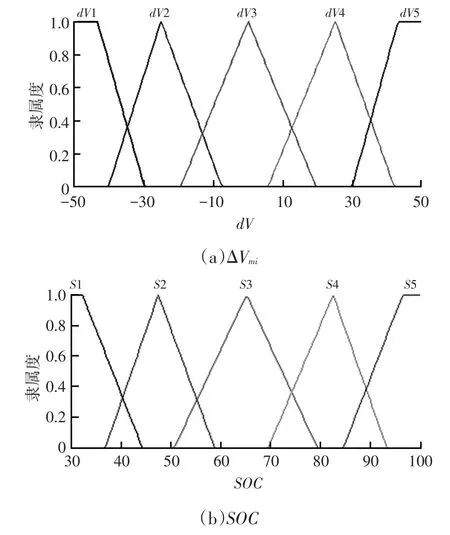
图4 输入变量隶属度函数

图5 输出变量隶属度函数
基于规则的输出参数利用隶属度函数由一组25个规则进行定义,如表2和表3所示。
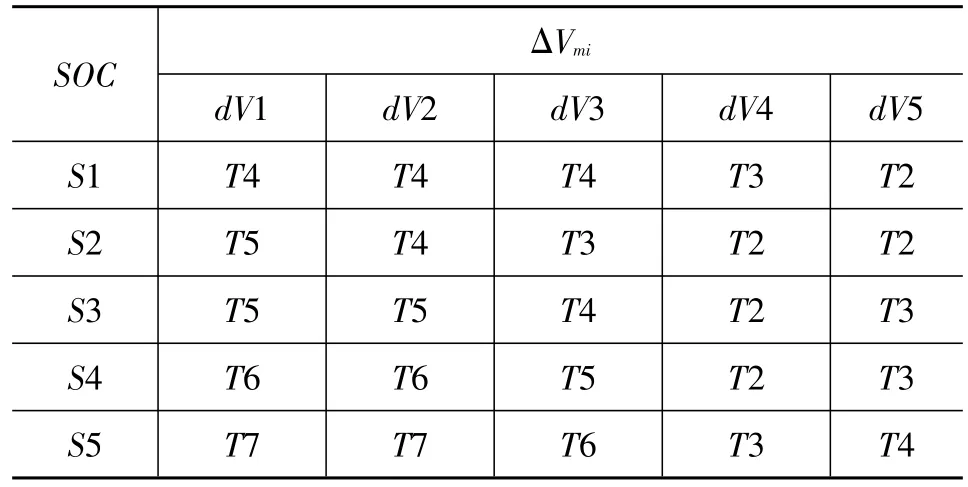
表2 基于规则的[Trq_Gap]
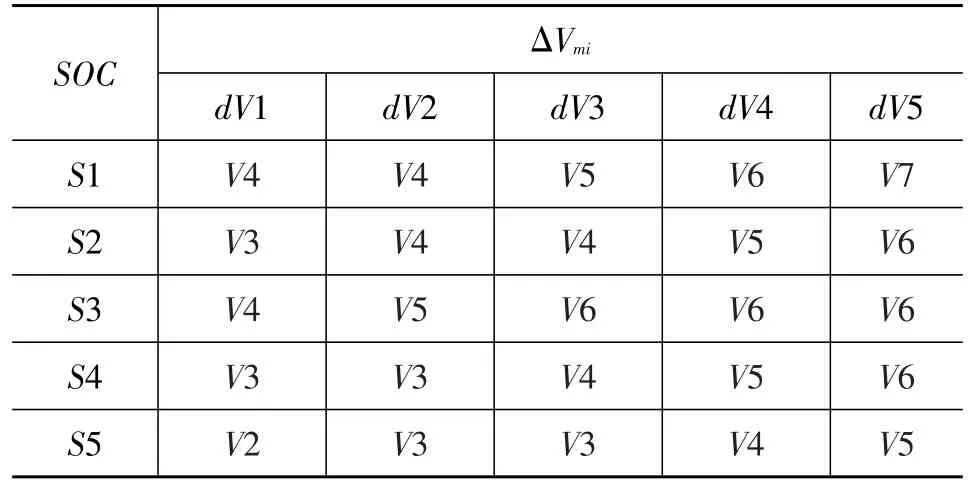
表3 基于规则的[v_EV_Gap]
例如,考虑这样一种情况:ΔVmi的隶属度函数是dV5,SOC的隶属度函数是S1,这意味着当前车速高并且SOC非常低。“[Trq_Gap]”的输出为T2,表示电机的输出转矩小,“[v_EV_GAP]”的输出是V7,这意味着纯电动模式(仅电机驱动车辆)的概率较低。此情况减少了驱动需求功率中的电机功率的比例,并增加了发动机输出功率的比例,由于车速较高,发动机的工作点接近高效率区域。
1.1 材料与试剂 人结肠癌细胞系SW1116购自美国细胞培养收藏中心。miRNA-1254模拟体以及对应的阴性对照由上海吉玛生物技术有限公司合成,序列见下表1。
My favorite season is winter.It is in December,January and February.In winter,the days are shorter while the nights are longer.
这些规则的基本原理是尽可能使发动机在接近最佳操作点处运行,同时使用电机来辅助驱动或发电。
3.1.4 加样回收率 精密称取注射用硫酸核糖霉素样品(批号13170416,硫酸盐含量24.3%),用水溶解并稀释成含硫酸核糖霉素4 mg·mL-1的供试品储备液。取“2.4.1”项下硫酸滴定液,加水稀释至1mg·mL-1作为对照品储备液。取供试品储备液1 mL至20 mL量瓶中,平行配制9份,每3份加入对照品储备液 0.8、1.0、1.2 mL,加水定容。按“2.1”项下方法进行检测,结果显示,高、中、低浓度回收率在99.9%~101.9%,均值为 101.1%,RSD 为 1.6%(n=9)。方法准确性较好,结果见表1。
3.3 门限值控制器
由式(2)和式(3)可知,阈值[Trq_Gap]的增加可以使电机转矩增加和发动机转矩减小。
在开学典礼上,一位教师代表的发言吸引了我的注意力。我从来没有听过这般清脆悦耳的声音,言语间文学味浓厚,更让我佩服的是,这位老师没有带讲稿,即兴发言都说得那般自然流畅,文采动人。如果闭着眼睛去听,还能感受到那种韵律感和节奏感。
PT模式识别模块是通过车辆的状态变量(当前车速,SOC和加速器/制动踏板的角度等)来识别PHEV驱动模式[3]。图6为驱动子模式第一层判别条件,该层次包含纯电驱动(Motor_Drive)和发动机驱动(Engine_On)两个状态。控制门限为纯电动最高速度([v_EV_Max]= 60 km/h)、“[v_EV_Gap]”和SOC。当“[v_EV_Gap]”阈值减小时,更倾向于选择“发动机驱动”模式,使用发动机功率所占比例增加。

图6 驱动模式判别条件
模糊控制器具有两个输入(ΔVmi和SOC)和两个输出([Trq_Gap]和[v_EV_Gap]),每一个变量中可以由变化域的数学隶属函数(梯形、三角或高斯函数)来表示。为了降低其复杂性,在该控制器中采用三角形和梯形函数,如图4和图5所示。如,表示平均速度差ΔVmi的不同可能状态是{dV1,dV2,dV3,dV4,dV5},其意义为:dV1为“负大”,dV2为“负小”,dV3为“中”,dV4为“高小”,dV5为“高大”。输入变量ΔVm的变化域为[-50,50](图4)。

式中,Treq为驾驶员需求转矩;Te_opt为发动机转矩上限阀值。
利用Matlab/Simulink建立了基于规则的门限值控制器[8]。该控制器包括“输入信号模块”、“输出信号模块”、“驾驶需求计算模块”,“PT模式识别模块”和“转矩分配模块”等子模块。
4 仿真验证
为了验证所提出策略的有效性,利用Matlab/Simu⁃link和AVL Cruise建立联合仿真模型。图7为Cruise整车模型,该模型通过“Cruise interface”模块与Matlab/Simulink门限值控制器进行通信并进行联合仿真。选择WLTC循环工况作为验证工况[10],如图8所示。其行驶距离为39.1 km,全程平均速度Vm为26.8 km/h,运行时间为5 245 s,各工况段平均速度Vmi如图8所示。

图7 Cruise整车模型
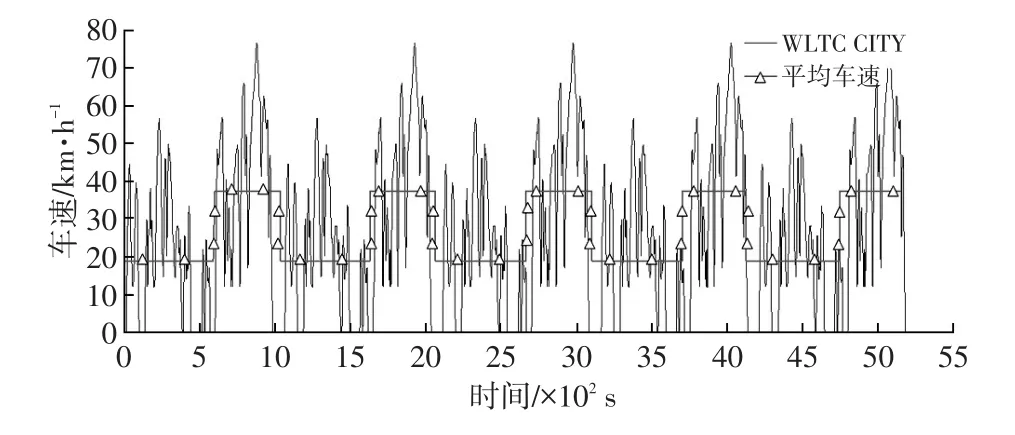
图8 WLTC循环工况和平均车速
为了对比验证,选择了在CD阶段是纯电模式的全电行程策略(All Electric-Range,AER)和有固定门限值的混合控制策略(Blended)进行对比分析。3种策略的燃油经济性仿真结果如图9所示,其中“Fuzzy”为本文所建立的模糊自适应控制策略。由图9可看出,Fuzzy控制策略的燃料消耗量最低,与AER策略和Blended策略相比分别下降了6.8%和24.2%。

图9 燃油经济性仿真结果
图10为SOC-时间历程,3种仿真结果如下:
a.在行程结束时,基于工况的模糊自适应控制策略恰好达到CD模式的低限制(35%)。
b.AER策略的SOC值在4 000 s时降至CD模式的最低值(35%),此后PHEV工作在CS模式,需要发动机驱动车辆同时给电池充电(图11)。图12是发动机效率比较,结果表明,模糊自适应控制策略的整体效率高于AER策略,这表明模糊自适应控制策略可以提高发动机效率。
c.混合控制策略在行程结束时,其SOC下降到47%,这意味着仍有12%的SOC未被消耗,导致了油耗的增加。
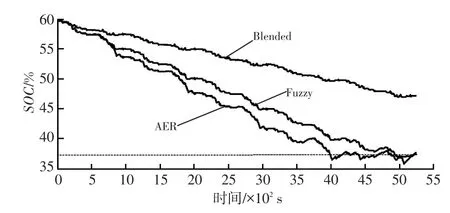
图10SOC-时间历程

图11 发动机转矩时间历程

图12 不同控制策略下发动机效率对比
上述分析表明,本文所建立的模糊自适应控制策略可以提高PHEV的经济性。
5 结束语
本文基于智能交通系统(ITS),提出了基于工况的PHEV模糊自适应控制策略,设计了该策略的基本控制框架,并研究了关键的技术问题。通过ITS获得未来路径的各段平均速度,该策略可以通过合理规划使用电池电量来提高PHEV系统的效率。最后通过Simulink和Cruise搭建了联合仿真模型,进行了不同控制策略的燃油经济性对比分析,结果表明,模糊自适应策略能够使PHEV适应行驶工况特性,合理规划SOC,从而提高PHEV的经济性。
1 Jeffrey Gonder,Tony Markel.Energy Management Strategies for Plug-in Hybrid Electric Vehicle,Advanced Hybrid Ve⁃hicle Powertrains.Michigan,SAE.2007-01-0290,April 2007.
2 Phillip B Sharer,Aymeric Rousseau,Dominik Karbowski,et al.Plug-in Hybrid Electric Vehicle Control Strategy:Com⁃parison between EV and Charge-Depleting Options,Ar⁃gonne National Laboratory,SAE.08PFL-554,April 2008.
3 Namwook Kim,Aymeric Rousseau.Comparison between Rule-Based and Instantaneous Optimization for a Single–Mode,Power-Split HEV,Argonne National Laboratory, SAE.2011-01-0873,January 2011.
4 Scott J Moura,Hosam K Fathy,Duncan S Callaway,et al.A stochastic optimal control approach for power management in plug-in hybrid electric vehicles,2008 ASME Dynamic Systems and Control Conference.Michigan, USA, DSCC2008-2252,October 2008.
5 MA Xianghua,YE Yinzhong.Study on genrtic-fuzzy control strategy for PHEV Drive system,Proceeding of the 32ndchi⁃nese congtrol conference.Xi’an,China,pp.7575-7579,Ju⁃ly 2013.
6 Wu Jian.Fuzzy Control Strategy of Parallel HEV Based on Driving Cycle Recognition,2012 IEEE 7th International Power Electronics and Motion Control Conference.Harbin, China,pp.2636-2639,June 2012.
7 A Neffati,S caux,M adel.Double Fuzzy Logic Decision in HEV Engergy Management,EVS27 International Battery, Hybrid and Fuel Cell Electric Vehicle Symposium.Barcelo⁃na,Spain,pp.1-5,November 2013.
8 Yacine Gaoua,Stéphane Caux,Pierre Lopez.Energy Man⁃agement Using Fuzzy Logic,on HEV,EVS27 International Battery,Hybrid and Fuel Cell Electric Vehicle Symposium.Barcelona,Spain,pp.1-5,November 2013.
9 周能辉,赵春明,辛明华,等.插电式混合动力轿车整车控制策略的研究.汽车工程,2013,35(2):99~104.
10 聂彦鑫,张永生,康征,等.插电式混合动力汽车工况能耗及排放特性研究.汽车技术,2013(10):8~13.
(责任编辑 文 楫)
修改稿收到日期为2017年1月4日。
Research on Route-Based Fuzzy Adaptive Control Strategy of PHEV
Chen Huiru1,Guo Jianhua2,Chuliang2
(1.Changchun Vehicle Exhaust Pollution Management Center,Changchun,130022;2.State Key Laboratory of Automotive Simulation&Control,Changchun,130022)
The Route-based Fuzzy Adaptive Control Strategy(RFACS)of PHEV is presented in this research based on the Intelligent Transportation System(ITS).We used ITS to get the speed characteristic of the future path for fuzzy intelligent control,the RFACS can improve the economy of PHEV system by the rational distribution and use of battery power.The system simulation model was established by Simulink and Cruise,and the results of simulated fuel consumption were compared and analyzed.The simulation results showed that the RFACS strategy can distribute battery power rationally according to characteristic parameters of driving route,thus improve the economic performance of PHEV.
PHEV,ITS,Fuzzy adaptive control
插电式混合动力轿车 智能交通系统 模糊自适应控制
U461
A
1000-3703(2017)04-0040-05
猜你喜欢
中学生数理化·八年级物理人教版(2022年9期)2022-10-24 07:03:56
中学生数理化·八年级物理人教版(2020年9期)2020-11-16 01:17:58
中学生数理化·八年级物理人教版(2019年9期)2019-11-25 07:33:04
电子测试(2018年15期)2018-09-26 06:01:04
四川冶金(2018年1期)2018-09-25 02:39:26
通信电源技术(2016年1期)2016-04-16 04:57:26
自动化学报(2016年8期)2016-04-16 03:38:51
西北工业大学学报(2015年1期)2016-01-19 03:29:56
哈尔滨师范大学自然科学学报(2015年6期)2015-04-23 08:20:35
电机与控制应用(2015年3期)2015-03-01 03:49:59
