
电力推进系统实时监控平台的研究
2017-04-25 06:38李亚轩
实验室研究与探索 2017年3期
高 燕, 张 菁, 李亚轩, 刘 瑾
(1.上海工程技术大学 电子电气工程学院,上海 201620; 2.山东大学 控制科学与工程学院,济南 250061)
电力推进系统实时监控平台的研究
高 燕1, 张 菁1, 李亚轩2, 刘 瑾1
(1.上海工程技术大学 电子电气工程学院,上海 201620; 2.山东大学 控制科学与工程学院,济南 250061)

采用三相异步电动机模拟螺旋桨负载,应用PLC、变频器、推进电动机和螺旋桨仿真电动机等通过CC-Link现场总线构建了电力推进系统实时监控平台;并给出了系统的数据采集程序和控制程序。实验结果表明,该电力推进系统在不同工况下的工作状态和螺旋桨特性。本系统已实际应用于船舶电力推进系统的实时监控。
电力推进; 螺旋桨负载仿真; 实时监控
0 引 言
20世纪80年代以来,交流电动机变频调速技术的日渐成熟得益于电力电子技术的快速发展[1-3],相对于传统机械推进方式,电力推进方式的优点不断显现[4],使得船舶电力推进方式迎来了一个蓬勃发展的新时期[5]。电力推进方式的系统作为一种被广泛采用的先进船舶推进系统,是现代化船舶发展的必然趋势[6-7]。现代化的船舶电力推进系统已全面融合了交流变频调速技术、最先进的数字控制技术和网络技术[8-10]。因此,进行船舶电力推进系统研究,对我国航海事业的发展具有重大意义[11-14]。
船舶电力推进系统主要由监测与控制功能构成。本文从船舶电力推进系统的结构组成出发,构建了集监测与控制一体化的小比例半实物船舶电力推进仿真系统。为了保证船舶电力推进系统设备间高速、大容量、稳定的数据通信,该系统运用CC-Link现场总线技术,并选用RS-232串口通信实现PLC与监控计算机的连接。
1 船舶电力推进仿真系统概述
本设计选择三相交流异步电动机作为推进电动机,采用变频器驱动推进电动机并对推进电动机进行变频调速控制。船舶电力推进系统主要由推进电动机、螺旋桨和调速控制系统三部分组成,在船舶电力推进系统研究中,用物理模拟实现螺旋桨负载的仿真是一种常用的实验方法,本设计利用一台三相交流异步电动机模拟真实螺旋桨的工作特性,为推进电动机提供仿真的负载转矩,通过一台变频器控制螺旋桨仿真电动机的转矩。
负载变频器、螺旋桨负载仿真电动机和负载控制单元组成负载模拟子系统,控制螺旋桨仿真电动机的输出转矩,实际模拟螺旋桨运动特点。推进变频器、推进电动机和推进控制单元组成推进子系统,控制推进电机的转速。本设计选择可编程控制器(PLC)作为两个子系统的控制单元,控制功能由软件实现。船舶电力推进仿真系统原理框图如图1所示。
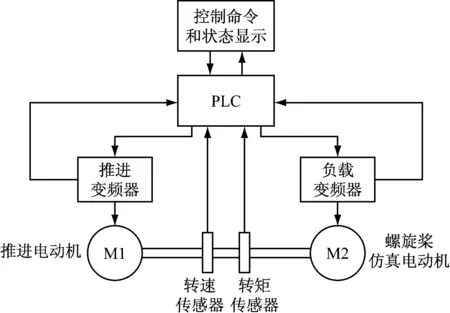
图1 船舶电力推进仿真系统原理框图
2 船舶电力推进系统仿真平台的构建
系统设两个PLC,PLC1位于集中控制室,是系统的控制单元;PLC2位于变频器附近,作为PLC1的远程模块,通过其模拟量输入模块为PLC1采集转矩转速传感器的信号。PLC1、PLC2、推进变频器和负载变频器通过CC-Link现场总线连接,船舶电力推进仿真系统的控制结构如图2所示。
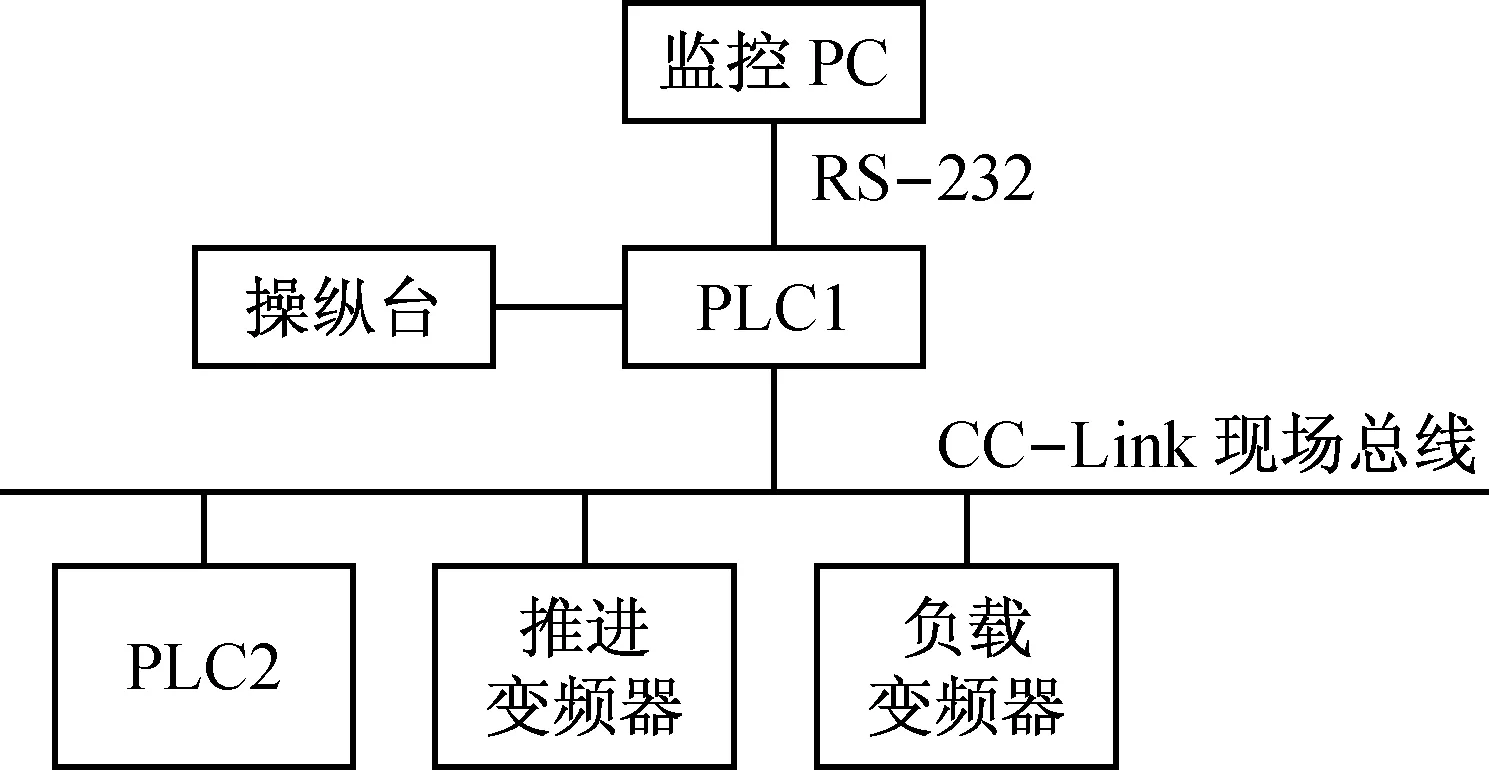
图2 船舶电力推进仿真系统结构图
该系统集控制、监测与报警一体化,主要实现的功能为:①推进子系统的转速控制;②负载模拟子系统的转矩控制;③实时监测两个子系统的重要参数和状态,包括推进变频器和负载变频器的输出频率、输出电压和输出电流,推进电动机和螺旋桨仿真电动机的转速和转矩等。
监控计算机或操纵台向PLC1发送控制命令,如推进电动机正转、反转、停止、转速给定命令;PLC2通过其模拟量模块接收转矩转速传感器的信号,转化为对应的实际转速值和实际转矩值,通过CC-Link现场总线将转矩测量值、转速测量值实时传输到PLC1;PLC1根据控制命令、转速测量值、转矩测量值计算控制量,实现对推进子系统的转速闭环控制和负载模拟子系统的转矩闭环控制。
PLC1通过CC-Link总线从推进变频器和负载变频器实时读取两个子系统的重要参数和状态,上位机再通过RS-232串口从PLC1读取这些参数。
PLC1、PLC2均选择三菱FX2N系列PLC,推进变频器和负载变频器选择三菱FR-F500系列变频器。要实现CC-Link通信,需要为每个设备配置通信模块并设置站号。本文将PLC1设为主站,PLC2、推进变频器和负载变频器为远程设备站。系统配置如表1所示。
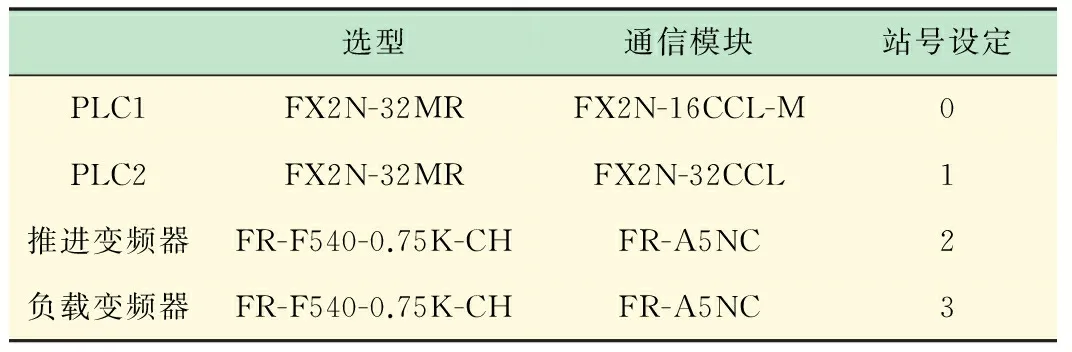
表1 系统配置
CC-Link现场总线系统在硬件连接设置无误后,为了启动数据链接还需进行通信初始化设置。三菱FX2N系列PLC作为CC-Link主站时,通信初始化设置通过PLC编程实现。在调试阶段,主站PLC编程将通信初始化参数写入FX2N-16CCL-M的缓冲存储器的相应地址中,然后通过缓冲存储器的参数启动数据链接,正常启动数据链接后再将参数写入EEPROM中;在程序运行阶段,则通过EEPROM的参数启动数据链接。
3 系统软件设计
实现该系统功能的软件设计包括:①推进电动机转速闭环控制和负载电动机转矩闭环控制;②系统重要参数监测,即下位机数据采集程序;③主站PLC1与上位监控计算机的串口通信程序。
系统控制程序和下位机数据采集程序皆由主站PLC实现;根据三菱FX系列PLC与计算机通信的专用协议,FX系列PLC与计算机通信时由计算机编程向FX系列PLC发送数据读写请求,PLC自动响应不需要编程。由于篇幅所限,本文只介绍主站PLC中的软件设计。
主站PLC采用PID控制算法实现推进电动机的转速闭环控制和负载电动机的转矩闭环控制。FX2N系列PLC提供了PID控制用的功能指令,用户不需要对PID运算编程,使用时只需设置一些控制参数。推进电动机的转速在某些速度值时,可能引起船舶共振或电动机速度振荡,称为临界转速。在临界转速时,推进电动机转速振荡则导致负载仿真电动机转速不稳定,所以推进电机应避开临界转速。系统主程序流程图如图3所示,控制子程序流程图如图4所示。
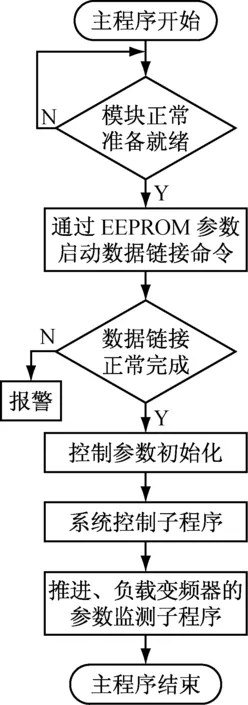
图3 主程序流程图
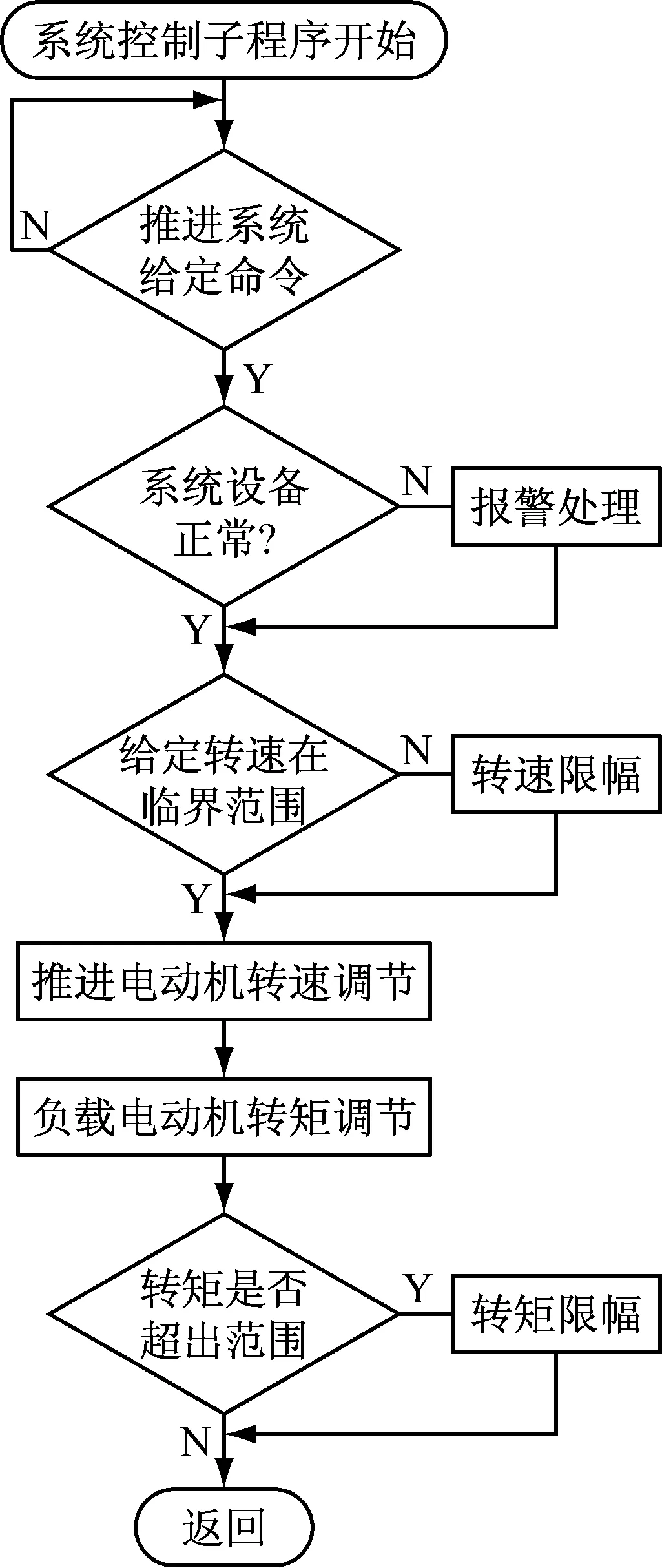
图4 系统控制子程序流程图
主站PLC通过CC-Link从推进变频器和负载变频器的通信模块FR-A5NC中读取系统需要监测的各个参数。FR-A5NC的远程寄存器RWw0存放监控代码,RWr0中是由RWw0指定的监测值。PLC向FR-A5NC的RWw0写入监控代码并置位监控命令RYC,RWr0中的监测值就不断更新,同时监控状态位RXC被置位为ON。PLC从RWr0中读取监测值后向RWw0写入下一个监控代码,由于所有监测值共用同一个地址RWr0,为避免错误地存取,PLC读取上一个监测值后应复位监控命令RYC,这样监控状态位RXC也被复位,在下一次读取之前先判断监控状态位是否被重新置位。从两个变频器中采集数据的过程相同,本文仅以采集推进子系统的参数为例,推进变频器的通信模块FR-A5NC的相应缓冲存储器在主站FX2N-16CCL-M中的映射地址如表2所示。
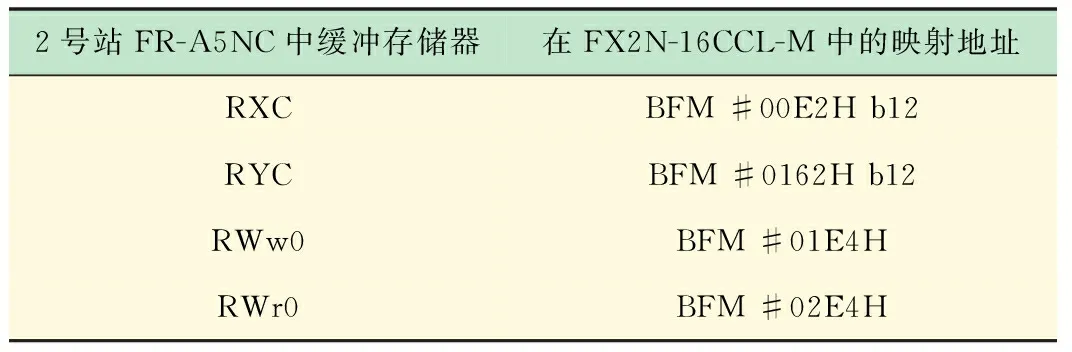
表2 缓冲存储器地址映射表
主站PLC的D0预置监控代码,系统需从变频器采集输出频率、输出电流、输出电压和运行速度4个监测值,所以在不同时刻向D0写入如下对应监控代码(十六进制):输出频率,0001H;输出电流,0002H;输出电压,0003H;运行速度,0006H。
主站PLC将D0中预置的监控代码写入BFM #01E4H,同时置位BFM#0162H b12,则BFM#02E4中的监测值被不断更新。PLC将读取监测值时,同时复位BFM#0162H b12,然后向BFM #01E4H写入下一个监控代码。4个监测值从BFM #02E4H分别读出到D1、D2、D3和D4,程序中使用了变址寄存器简化编程,数据采集子程序流程如图5所示。
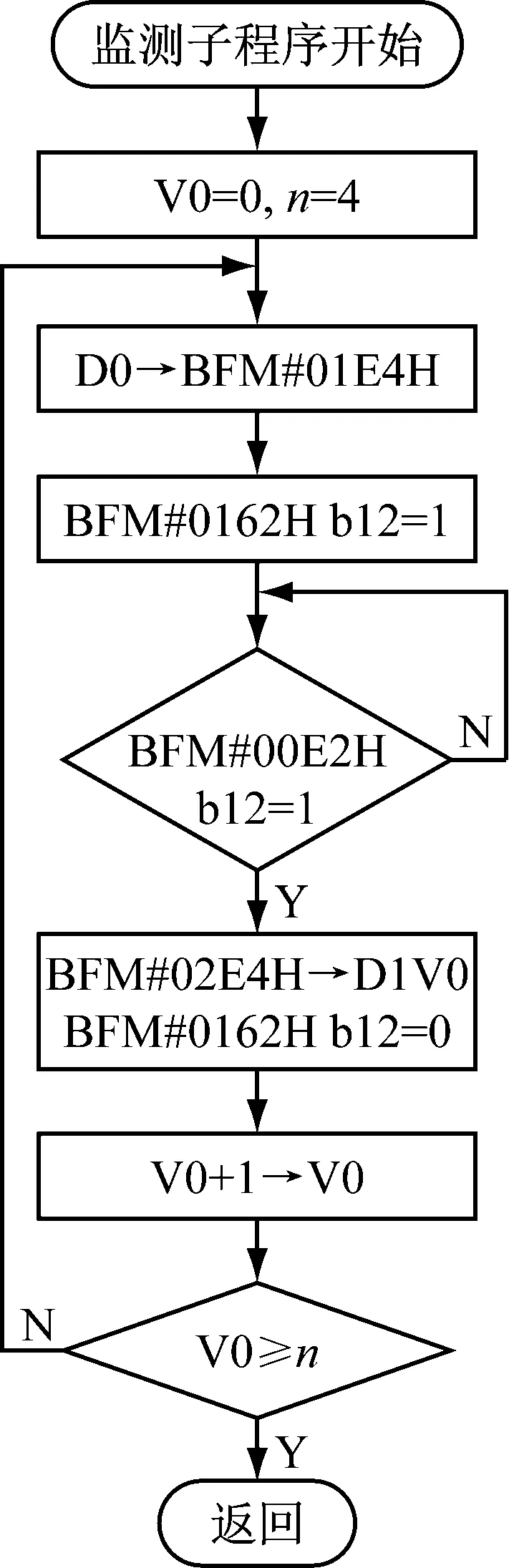
图5 数据采集子程序流程图
4 结 语
本文采用较高实时性和可靠性的CC-Link现场总线以及目前广泛应用的RS-232串口通信技术,能够在实验室条件下构建船舶电力推进系统仿真平台。经多次测试,该系统的数据传输满足实时性的工业实际要求,实现了对船舶电力推进仿真系统的实时监测与控制。船舶航行时远离陆地、工作环境恶劣[15-16],本文的设计能够很好地满足船舶电力推进系统对实时性和可靠性的高要求。
[1] 陈佰时.电力拖动自动控制系统[M].北京:工业机械出版社,1996.247-255.
[2] 高 燕,刘 瑾,张 菁,等.基于PLC的多数据采集监测报警系统研究[J]. 仪表技术与传感器,2016(5): 40-42.
[3] 王 琪. 船舶机舱监测报警系统的应用现状及发展趋势[J]. 机电设备,2007, 24(6): 32-35.
[4] 赵 红,郭 晨,吴志良.船舶电力推进系统的建模与仿真[J].中国造船,2006,45(4):51-57.
[5] 王 淼,戴剑锋,周双喜,等.全电力推进船舶电力系统的数字仿真[J].电工技术学报,2006,21(4):62-67.
[6] 李东丽,赵跃平.船舶大容量负载对电力系统的影响[J].船舶工程,2003,25(6):47-50.
[7] 俞万能,李素文,马昭胜.小型船舶电力推进控制系统的研发[J].中国航海,2011,34(3):18-23.
[8] 俞万能.无源滤波装置在船舶电力推进系统中的应用[J].中国航海,2009,32(3):29-33.
[9] 李 帆,鲍曙光,吴 明.PLC在船用电力推进控制系统中的应用[J].船电技术,2009,29(2):47-50.
[10] 林文立,刘志刚,沈茂盛.新型船舶综合全电力推进模拟实验系统研究[J].北京交通大学学报,2006,30(5):109-112.
[11] 郭 燚,郑华耀,黄学武.船舶电力推进混合仿真系统设计[J].系统仿真学报,2006,18(1):57-61.
[12] 宋艳琼,陈 辉,高海波.船舶电力推进监控系统的设计与实现[J].船海工程,2007,36(1):79-81.
[13] 王 冠,陈建魁,翟 洁,等. 基于放大器和温度传感器的温度采集方案[J]. 仪表技术与传感器,2014(11): 67-69.
[14] Mormoto S, Sanada M, Takeda Y. Effects and compensation of magnetic saturation in flux-weakening controlled permanent magnet synchronous motor drivers[J].IEEE Trans Ind Applicant,1994,30:1632-1637.
[15] 朱本坤. 船舶机舱自动化监控专家系统设计[J]. 江苏船舶,2007, 24(6): 5-8.
[16] 陆 嘉,孟 文,李常辉,等. 基于VB的PLC与上位机通信软件的设计[J]. 自动化技术与应用,2007, 26(9): 79-81.
The Research on Real-time Monitoring Platform of Electric Propulsion System
GAOYan1,ZHANGJing1,LIYaxuan2,LIUJin1
(1. School of Electronic and Electrical Engineering, Shanghai University of Engineering Science, Shanghai 201620, China; 2. School of Scientific Control and Engineering, Shandong University, Jinan 250061, China)
In this paper, a three-phase asynchronous motor was used to simulate propeller load, and PLC, inverters, propulsion motor and propeller simulation motor were used to build the simulation platform of electric propulsion system by CC-Link field bus. The data collection program and control program of this system were introduced. The results of many experiments showed that the system can simulate the working states and provide the propeller’s characteristics of the marine electric propulsion system under different operating regimes. In addition, the system has been applied in real-time monitoring in electric propulsion system.
electric propulsion; propeller load simulation; real-time monitoring
2016-07-25
国家自然科学基金项目(61503238);上海市教委资助基金项目(ZZgcd14015)
高 燕(1985-),女,上海人,博士,讲师,主要研究方向为随机神经网络,传感器网络控制及工业过程控制。
Tel.:15026791158;E-mail:gy@sues.edu.cn
TP 274
A
1006-7167(2017)03-0083-03
猜你喜欢
防爆电机(2020年3期)2020-11-06
航空发动机(2020年3期)2020-07-24
测控技术(2018年5期)2018-12-09
电子制作(2017年7期)2017-06-05
兰台世界(2017年10期)2017-06-01
组合机床与自动化加工技术(2017年1期)2017-02-15
电子制作(2017年23期)2017-02-02
中国舰船研究(2014年1期)2014-05-14
电测与仪表(2014年18期)2014-04-04
电测与仪表(2014年13期)2014-04-04
