适应伺服机构卡死故障的控制指令重分配技术研究
2017-04-25 05:18程堂明
导弹与航天运载技术 2017年1期
程堂明,陈 宇
(1. 国防科技大学航天科学与工程学院,长沙,410073;2. 北京宇航系统工程研究所,北京,100076)
适应伺服机构卡死故障的控制指令重分配技术研究
程堂明1,2,陈 宇2
(1. 国防科技大学航天科学与工程学院,长沙,410073;2. 北京宇航系统工程研究所,北京,100076)
提出一种能够适应运载火箭伺服机构卡死故障的控制指令重分配技术。在传统运载火箭控制系统设计过程中,伺服机构指令是在不考虑伺服机构故障时设计确定的,一旦伺服机构发生卡死故障将可能导致箭体姿态失稳。为了提高运载火箭的安全性和可靠性,根据某伺服机构卡死角度,通过控制指令在多个冗余伺服机构之间的重分配,在伺服机构卡死情况下仍能保证姿态稳定。仿真结果表明,即使某个伺服机构卡死也能保证姿态稳定,而且不需要重新设计控制参数。
运载火箭; 控制重分配; 姿态控制
0 引 言
运载火箭容错与重构控制方法是提高火箭飞行可靠性的有效途径,在传统火箭设计过程中,往往注重硬件余度设计,而对解析冗余设计技术研究较少。解析冗余控制技术是利用系统不同部件之间的内在联系和功能上的冗余性,当系统中的一部分出现故障时,可以由冗余部分代替故障部分的工作,以保证系统在规定的时间内正常地实现规定的功能。解析冗余技术不需要增加硬件设备,具有成本低和易于工程实现的优点,在容错控制中得到了广泛的应用。
大型捆绑火箭由于同时利用芯级和助推发动机进行姿态控制,即多发动机联合摇摆控制,一方面提高了火箭的控制能力,另一方面由于伺服机构台数的增多,在单台伺服机构故障率一定的情况下,伺服系统发生故障的概率也大大增加,一旦某台伺服机构发生故障,可能导致姿态失稳,从而造成灾难性的后果。而且,伺服机构台数的增多,也增加了系统的余度。当单台伺服机构发生故障时,可以利用剩余未发生故障的发动机进行控制指令重分配,从而提高系统的可靠性。采用控制指令重分配技术后,控制系统的设计将分离成容错控制器设计和控制分配器设计两部分,其优点主要有以下3点:
a)可以充分考虑伺服机构位置、速率的范围限制,如果一个伺服机构饱和,其他伺服机构仍可用于产生期望的控制效果;
b)控制分配可以利用系统冗余,针对特定目标,实现系统优化;
c)如果伺服机构出现故障,则可以通过控制重分配设计以补偿这些故障,而不需要重新设计控制参数。
目前,针对各种飞行器作动器故障开展了控制分配技术研究。文献[1]针对多操纵面战斗机提出了一种新的基于加权最小二乘法和控制分配算法的重构控制方法;文献[2]针对多操纵面飞机提出了一种基于线性规划的多操纵面重构控制策略;文献[3]针对X-35B多种飞行模式和控制失效模式提出了控制分配算法;文献[4]针对波音747飞机提出了一种考虑伺服机构动态特性的控制分配算法,并采用遗传算法对控制增益进行优化。然而针对运载火箭伺服机构故障开展的研究还很少。
常用的控制指令重分配方法有直接控制分配法、串接链法和线性规划法,这些方法所用的共性技术是求解有约束优化问题,计算量较大,不便于工程应用。伪逆分配法通过计算控制输入矩阵的伪逆,获取控制分配矩阵,虽然该方法计算量小,但不是总能给出优化结果,特别在故障情况下,可能无法求解。
本文以某型运载火箭[5]为例,根据运载火箭姿态动力学模型[6]提出一种芯级和助推发动机联合控制分配方法,该方法计算量小,计算速度比其他方法都要快。仿真结果表明,本文通过控制指令重分配算法可以有效补偿故障发动机引起的干扰摆角,故障前后能够保证姿态动力学特性和原有的控制性能保持不变,控制参数无需重新设计,从而实现对伺服机构卡死故障的适应性,提高了姿态控制系统的鲁棒性。
1 问题描述
1.1 发动机布局描述
某构型运载火箭一级发动机布置如图1所示。

图1 某构型发动机布局示意
图1中,ox1y1z1为移动到箭体尾部的箭体坐标系;xj1,xj2为2台芯级发动机; zt1~zt4为4台助推发动机,4台助推发动机采用“+”字型布局,各发动机的摆角按图1所示方向为正。其δxj1~δxj4分别为4台芯级伺服机构摆角;δzt1~δzt4分别为4台助推伺服机构摆角。
1.2 姿态动力学模型描述
在本文的研究过程中,可不考虑弹性振动和液体晃动特性,按照文献[6]提供的运载火箭刚体姿态动力学模型如下:
a)俯仰通道。
b)偏航通道。
c)滚动通道。

式中φ ψ γ, , 分别为俯仰、偏航、滚动通道的姿态角偏差;θ,σ,αβ分别为速度倾角、速度偏角、攻角和侧滑角的偏差;δφxj,δψxj,δγxj分别为俯仰、偏航、滚动通道芯级发动机摆角;δφzt,δψzt,δγzt分别为俯仰、偏航、滚动通道助推发动机摆角;αwp,αwq,βwp,βwq分别为平稳风和切变风产生的攻角和侧滑角;,,,,分别为结构干扰系数;其余系数的物理意义参见文献[6]。
1.3 控制指令重分配问题描述
根据图1所示某构型运载火箭的发动机布局可知,一级飞行段控制发动机的伺服机构共有8台,当其中一台发生卡死故障时,不但不能提供有效的控制力矩,还将产生附加的不平衡力矩,从而导致姿态失稳,影响整个飞行任务的成败。本文主要研究当一台伺服机构发生卡死故障时,如何重分配其余 7台伺服机构的控制指令,在克服干扰力矩的同时,总的控制力矩保持不变。
2 芯级和助推发动机联合重分配技术
2.1 联合重分配方案设计思想
芯级和助推发动机联合重分配方案的设计思想是:针对捆绑运载火箭利用芯级和助推发动机联合摇摆进行姿态控制的特点,通过对控制系统指令摆角的重分配,使运载火箭芯级和助推发动机产生的总控制力矩在故障发生前后保持不变,从而实现容错控制。
2.2 联合重分配基本方案
根据运载火箭姿态动力学模型,为了表述方便,用归一化后的控制力矩(即用控制力矩除以相应转动惯量,以下简称为控制力矩)来表示实际的控制力矩。助推飞行段控制发动机的伺服机构共有8台,由于火箭结构和发动机布局的对称性,任意一个伺服机构卡死的控制分配方案相类似。不失一般性,假设助推2号伺服机构发生故障,以下假设δz′t2=δf,表示助推2号发动机伺服机构发生故障,故障状态下的发动机摆角为δf。
在正常工作状态下,设芯级和助推发动机产生的控制力矩分别为Mxj和Mzt,产生的总控制力矩为M,则有:

其中:

即:

式中δxji和δzti分别为芯级和助推发动机控制指令,其中;和分别为芯级和助推发动机控制指令分配比例,其中=0.5,=1.0,i=φ ,ψ, γ;上述比例取值是根据芯级和助推发动机摆角限幅值比值关系确定的。此时,。
当助推2号发动机发生故障时,故障发动机仍然产生“控制”力矩,但实际上此时的“控制”力矩已经成为姿态稳定的障碍。因此,把故障发动机所产生的“控制”力矩称为干扰力矩,记为。
根据助推通道的等效摆角公式:

则干扰力矩为
故障发生后需要重分配控制指令到剩余7台正常工作的伺服机构,故障伺服机构将不再分配控制指令。设系统重分配后芯级和助推发动机产生的控制力矩分别为和。故障伺服机构产生的干扰力矩可以看作是系统本身的固有力矩,因此,需要重分配的控制力矩M*包括原有的控制力矩M和克服故障产生的干扰力矩所需要的控制力矩,则有:

将式(10)、式(12)代入式(13)后可得:
重分配后芯级和助推的控制力矩为

将式(15)代入式(8)后可得:

重分配后芯级通道的等效摆角公式:

重分配后助推通道的等效摆角公式为

则:

2.3 联合重分配比例系数选取
重分配后芯级和助推发动机需要产生的控制摆角可采用多种方式选取分配比例系数,比如控制摆角按比例分配、控制力矩按比例分配、实际摆角按比例分配等分配方法。为了发挥出各台伺服机构的最大能力,本文选取实际摆角按比例分配方案作为研究方案。

则有:

由于芯级和助推发动机摆角限幅值存在一定的比例关系,则有 k1=k3=k4=k ,则有:

即:

将式(24)代入式(16)则有:
化简后可得:

将式(27)代入式(19)和式(20)后可得各台伺服机构的摆角指令。
值得注意的是,火箭发动机在工作过程中,各个伺服摆角都有限幅值,当分配给某个伺服摆角的指令超过其限幅值时,分配公式将不严格满足,控制分配后所产生的控制力矩将不足以完全补偿损失的控制力矩。而本文所提出的方法可以根据摆角限幅值确定分配系数,因此,可以最大程度地解决指令重分配后的摆角限幅问题。
3 仿真验证
根据芯级和助推发动机摆角限幅值的比例关系可以确定k=0.75,假设77 s时助推2号发动机发生大摆角卡死故障,仿真结果如图2~6所示。
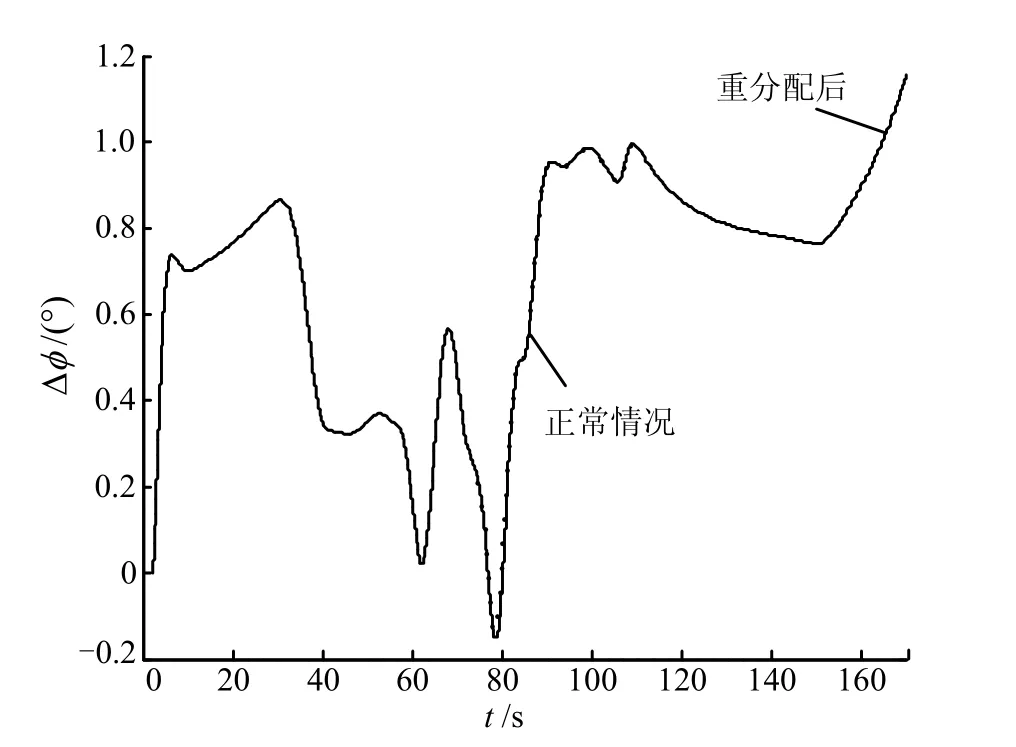
图2 俯仰角偏差
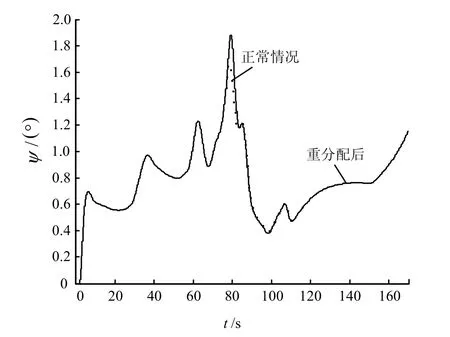
图3 偏航角偏差

图4 滚动角偏差

图5 芯级发动机摆角

图6 助推发动机摆角
从图2~6可知,本文所提出的芯级和助推发动机联合重分配方案可以有效消除一台伺服机构卡死故障的影响,从而实现姿控系统稳定。
4 结 论
本文提出了一种能够适应运载火箭伺服机构卡死故障的控制指令重分配技术。该方法针对捆绑运载火箭利用芯级和助推发动机联合摇摆进行姿态控制的特点,通过对芯级和助推发动机指令摆角的重分配,使运载火箭芯级和助推发动机产生的总控制力矩在故障发生前后保持不变,从而实现控制系统的容错控制。本文所提出的方法根据摆角限幅值确定分配系数,可以最大程度的解决指令重分配后的摆角限幅问题。仿真结果表明,所提出的方法可以有效消除一台伺服机构卡死故障的影响,从而实现姿控系统的稳定。
[1]朱心中, 刘春生. 基于控制分配的多操纵面战斗机重构控制研究及应用[J]. 东南大学学报(自然科学版), 2010, 40(S1): 162-166.
[2]崔玉伟, 章卫国, 李广文, 史静平. 基于线性规划的多操纵面重构控制研究[J]. 飞行力学, 2011, 29(2): 41-44.
[3]Ken B, John B. Control allocation for the X-35B[R]. AIAA 2002-6020, 2002.
[4]Hammad A, Trevor M Y, Daniel T, Edin O. Control allocation with actuator dynamics for aircraft flight controls[R]. AIAA 2007-7828, 2007.
[5]吴燕生, 何麟书. 新一代运载火箭姿态控制技术[J]. 北京航空航天大学学报, 2009, 35(11): 1294-1297.
[6]龙乐豪. 液体导弹与运载火箭系列总体设计[M]. 北京: 宇航出版社, 2001.
Research on Reconfigurable Control Allocation Technology under Stuck Actuator Failures
Cheng Tang-ming1,2, Chen Yu2
(1. College of Aerospace and Material Engineering, National University of Defense Technology, Changsha, 410073; 2. Beijing Institute of Astronautical Systems Engineering, Beijing, 100076)
The reconfigurable control allocation technology under stuck actuator failures is proposed in this paper. During the design of tradition launch vehicle control system, the actuator control command signal is confirmed without consideration the actuator failures. So the attitude of launch vehicle is unstable under stuck actuator failures. To improve the safety and reliability of the launch vehicle, the reconfigurable control allocation technology is used and control command signals of the other actuators are reconfigured according to one stuck angle. The simulation results demonstrate that this approach can guarantee that the attitude of launch vehicle is stable without control parameter redesigned.
Launch vehicle; Reconfigurable control allocation; Attitude control
V448.1
A
1004-7182(2017)01-0051-05
10.7654/j.issn.1004-7182.20170113
2016-01-09;
2017-01-13
程堂明(1972-),男,博士研究生,研究员,主要研究方向为运载火箭总体设计
猜你喜欢
上海人大月刊(2022年5期)2022-05-19
航空发动机(2020年3期)2020-07-24
汉语世界(The World of Chinese)(2019年3期)2019-07-01
数学大王·趣味逻辑(2019年5期)2019-06-13
汽车实用技术(2018年22期)2018-12-08
人大建设(2018年6期)2018-08-16
当代陕西(2018年6期)2018-05-22
北京航空航天大学学报(2017年1期)2017-11-24
山东青年(2016年12期)2017-03-02
专用汽车(2015年1期)2015-03-01