
悬浮式深弹反鱼雷武器系统的有效拦截域分析*
2017-04-24 07:57田恒斗侯宝娥翟东民解放军91439部队辽宁大连116041
火力与指挥控制 2017年3期
田恒斗,侯宝娥,翟东民,房 毅(解放军91439部队,辽宁 大连 116041)
悬浮式深弹反鱼雷武器系统的有效拦截域分析*
田恒斗,侯宝娥,翟东民,房 毅
(解放军91439部队,辽宁 大连 116041)
针对悬浮式深弹反鱼雷武器系统在作战使用中需对目标的可拦性进行快速判断的需求,提出了系统有效拦截域的概念,又根据系统作战流程和工作原理,将有效拦截域判断条件细化为时间域和空间域两个方面判据,进而构建了基于实战中可获取的战场态势等相关信息计算系统有效拦截域的数学模型,并具体给出了一个计算实例。研究结果可为其作战使用提供一定参考。
反鱼雷武器系统,悬浮式深弹,拦截域,数学模型
0 引言
鱼雷武器自从诞生起就对水面舰船构成了巨大威胁,因此,反鱼雷技术也一直是世界各国研究的热点。不过,由于反鱼雷作战涉及因素多、技术难度大,在很长一段时间内,仅有声诱饵、气幕弹等软对抗手段[1]。然而,随着鱼雷自导系统智能化程度的不断提高,特别是尾流自导鱼雷的大量装备,传统的水声对抗手段已难以形成有效的对抗能力[2]。因此,直接摧毁来袭鱼雷的硬杀伤式对抗技术开始受到各国重视,其中以俄罗斯海军已装备的“蟒蛇”反鱼雷深弹系统和美英等国正在发展的反鱼雷鱼雷最具代表性[3]。在此背景下,我国也加紧了悬浮式深弹反鱼雷武器系统相关技术和战术的研究[4-7]。在其作战使用中,因受系统固有的射程、射界等因素限制,尚无法对所有态势下的来袭鱼雷均进行拦截;且反鱼雷作战进程快,系统再装填时间较长,故通常仅有一次拦截机会;同时,如与水声对抗等系统进行联合反鱼雷作战,也需根据各自的对抗区域作出合理的联合防御决策。因此,科学迅速地判断来袭鱼雷目标是否处于悬浮式深弹反鱼雷武器系统的有效拦截范围内,是发挥其作战能力的重要基础。而目前这方面的研究还相对较少,文献[8]提出了系统射击区和杀伤区的概念,并初步探讨了射界和射距判别条件。在此基础上,本文提出了悬浮式深弹反鱼雷武器系统有效拦截域的概念,又根据系统作战流程和功能特点,将其细化为时间域和空间域两方面判据;并依据系统工作原理,完全基于实际作战中可以获取的战场态势信息,构建了相应的判断模型,给出了一个计算实例。以此进一步丰富相关的理论研究,并为其作战使用提供一定参考。
1 系统组成及其工作原理
为便于下文论述,首先将悬浮式深弹反鱼雷武器系统的组成及工作原理简介如下。该武器系统主要由鱼雷报警声纳、火控设备、发控设备、发射装置(包括随动设备和发射炮)、悬浮式深弹等部分组成,并通过作战系统以太网与本舰指挥控制系统、综合导航、水文气象、火力兼容、时统设备等系统交互信息[7],如图1所示。
图1 系统组成及接口关系示意图
舰船航行过程中,当存在潜艇威胁时,由指挥员决策进行水下防御作战准备,组织布放鱼雷报警声纳,向发射装置装填悬浮式深弹,系统备便后开始作战值班。当有鱼雷来袭时,其作战流程及工作原理如下。
1)鱼雷报警声纳探测到来袭鱼雷,发出鱼雷报警信号并向指挥控制系统和火控设备发送来袭鱼雷的目标信息。因鱼雷报警声纳为被动工作方式,故目标信息中仅包含来袭鱼雷方位信息。
2)指挥控制系统向悬浮式深弹反鱼雷武器系统下达目标指示,火控设备接收目指信息后,根据现场水文环境信息和战场情报估算鱼雷距离和类型,据此再综合本舰导航、气象等信息,生成拦截来袭鱼雷的作战方案,并输出各枚悬浮式深弹的射击诸元。
3)发控设备和发射装置根据火控设备发送来的射击诸元控制发射悬浮式深弹。
4)悬浮式深弹入水后开始工作,在系统估计的来袭鱼雷航向前方形成拦截阵。
5)在悬浮式深弹的有效工作时间内,当鱼雷穿过该拦截阵时,声引信在鱼雷和深弹最近距离处起爆战斗部,毁伤来袭鱼雷。如鱼雷未穿过拦截阵,悬浮式深弹一定时间后自毁。
2 系统有效拦截域的基本概念
本文将悬浮式深弹反鱼雷武器系统的有效拦截域定义为:在鱼雷报警时刻,经系统反应时间后立即发射悬浮式深弹,可对其进行有效拦截的鱼雷位置点的集合。鱼雷位置点可由报警时刻鱼雷相对本舰的方位和距离来表征,其中的方位直接来自于报警声纳的探测信息,距离则由系统火控设备根据现场水文环境等信息估算得出。
又根据前述系统作战流程和工作原理,系统在接到鱼雷报警信号后,在当前态势下经过系统反应时间立即发射悬浮式深弹可对来袭鱼雷实施拦截,应同时满足两个条件:第1,时间域判据,即鱼雷通过拦截阵的预估时刻应在悬浮式深弹的有效工作时间内;第2,空间域判据,即在发射时刻悬浮式深弹的布阵范围与预估的鱼雷航迹相交。下文将据此构建系统有效拦截域的数学模型。
3 系统有效拦截域的数学描述
为便于模型构建,首先建立如下坐标系:以鱼雷报警时刻本舰位置点为坐标原点,真北向为y轴正方向,正东向为x轴正方向;y轴正方向为0°航向,顺时针方向为航向增大;右舷角为正值,左舷角为负值。
3.1 时间域计算模型
图2 时间域判据示意图
鱼雷能否在悬浮式深弹的有效工作时间内通过拦截阵,除受系统的反应时间、射程,深弹飞行时间、展开时间、工作时间等固有参数影响外,主要还取决于来袭鱼雷与本舰的相对航向、航速和鱼雷报警距离。如图2所示,在某一报警舷角Qm上存在一个时间上最近可拦截的鱼雷距离Dtmin,在该距离处发出报警并经系统反应时间ts后立即发射悬浮式深弹,鱼雷可在其入水后开始工作的起始时刻通过拦截阵。同时,在该舷角上也存在一个时间上最远可拦截的鱼雷距离Dtmax,在该距离处发出报警并经ts后发射悬浮式深弹,鱼雷可在其有效工作时间的最后时刻通过拦截阵。
显然,只要在鱼雷报警时刻鱼雷与本舰距离D满足Dtmin≤D≤Dtmax,则在时间上具备拦截鱼雷条件。因此,对时间域的判断可转化为求取不同态势下的Dtmin和Dtmax问题。
3.1.1 Dtmin的计算方法
如图2,当悬浮式深弹入水开始工作这一时刻,假设鱼雷航行至T1(xT1,yT1)点,此时鱼雷与深弹发射时刻本舰位置点W(xw,yw)之间的距离应不小于悬浮式深弹最小射程Rmin,即满足下式:

式中,(xw,yw)可根据鱼雷报警时刻舰艇位置、本舰航向、航速按下式计算,

其中,(xw0,yw0)是鱼雷报警时刻本舰位置坐标;Cw为本舰航向;Vw为本舰航速。又鱼雷坐标(xT1,yT1)可由下式计算,

式中,VT为火控设备估计的鱼雷航速;CT为估算鱼雷航向,根据文献[3]提供的方法计算;tfmin为对应悬浮式深弹最小射程时的飞行时间;tz为深弹从入水到开始正常工作的展开时间;(xT0,yT0)为报警时刻鱼雷位置坐标,可由下式计算,

则满足式(1)的最小D值即为时间上最小可拦截的鱼雷距离Dtmin。计算时可通过迭代算法快速确定该值。
3.1.2 Dtmax的计算方法
如图2,在计算时间上最大可拦截距离时,考虑当悬浮式深弹恰好停止工作这一时刻,鱼雷所在T1'点到W点之间的距离应不大于深弹的最大射程Rmax,才能保证鱼雷在其有效工作时间内穿过拦截阵,即满足下式:

式中,(xw,yw)由式(2)计算,()计算式为

式中,tfmax为对应悬浮式深弹最大射程时的飞行时间;tg为深弹的有效工作时间;其他参数含义同式(3),其中(x'T0,y'T0)亦由式(4)确定。
则满足式(5)的最大D值即为时间上最大可拦截的鱼雷距离Dtmax,计算时也利用迭代算法确定该值。
3.2 空间域计算模型
空间域可拦的判据是在发射时刻悬浮式深弹的布阵范围与预估鱼雷航迹相交。受系统方位射界和射程限制,在不考虑本舰转向机动的条件下,对某一舷来袭的目标只有对应该舷武器可对其进行拦截,故对某一来袭目标系统的布阵范围为如图3所示的一扇环形区域,以舷角表示其射界范围为[Qmin,Qmax]。
图3 空间域判据示意图
显然,在满足时间域可拦判据的条件下,只要鱼雷航迹与深弹最大射程所形成的扇形区域相交或相切,即满足上述空间域可拦条件。该条件等价于发射时刻本舰位置点W(xw,yw)与鱼雷航迹线T0A之间的距离不大于深弹最大射程Rmax,即鱼雷航迹线与系统最大射程圆相交(或相切),且交点(或切点)A相对于W的舷角需在区间[Qmin,Qmax]内。
在本文坐标系下,直线T0A可表示为,

则上述空间域可拦条件的数学表示为,
式中(xw,yw)由式(2)确定,(xT0,yT0)由式(4)确定,则满足式(8)的最大D值即为空间上最大可拦截的鱼雷距离DLmax。
因方位射界限制,在本舰首尾方向存在一定范围的拦截盲区,在计算中当D<Dtmin时如仍不满足式(8),则对该报警舷角上的目标,系统无法拦截,判定DLmax=0。
3.3 有效拦截域的确定
综上,在报警时刻某一位置处的目标需同时满足时间域和空间域可拦条件,系统才能对其实施拦截。故对报警舷角Qm上的目标,系统有效拦截范围[Dmin,Dmax]为,
4 拦截域的计算实例
暂不考虑潜艇实施攻击时占领有利阵位等敌方因素和鱼雷报警声纳探测范围限制,假设鱼雷可能从任意方位攻击本舰,即鱼雷报警舷角Qm分布在[-180°,180°]区间内。设悬浮式深弹武器系统的相关参数取值为Rmin=1 000 m、Rmax=2 000 m、tfmin=10 s、tfmax=25 s、tz=6 s、tg=300 s、Qmin=±40°,Qmax=±160°。本舰航速分别取Vw=18 kn和Vw=30 kn。采用文中构建的数学模型进行计算,结果以极坐标形式表示如图4。图中以报警时刻本舰位置点为原点,本舰航向为0°方向,右舷目标舷角为正,左舷目标舷角为负。
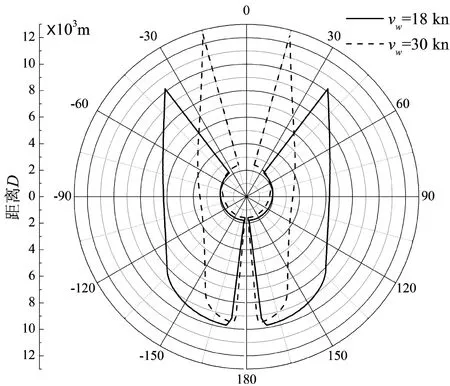
图4 有效拦截域计算结果
本舰航速Vw=18 kn时,系统对来袭鱼雷的有效拦截域为图中实线围成区域,Vw=30 kn时为虚线围成区域。由图可见,系统对来袭鱼雷的有效拦截域是以本舰航向为轴线,左右舷对称的两块区域;且对正横附近目标的有效拦截范围相对较小,在大、小舷角处其拦截范围相对较大;但受系统方位射界限制,在舰首尾方向存在一定范围的拦截盲区,该盲区的角度范围小于系统射界死角。同时,随本舰航速不同,系统有效拦截域变化显著,随航速增大其在正横附近的拦截域变小,但在舰首方向的拦截域变大[9]。
在实际应用中,可根据本舰航速、系统工作参数、作战对象类型等信息,预先计算生成有效拦截域态势图,以便辅助指挥员在鱼雷报警时刻快速判断目标是否可拦截,进而采取科学的对抗策略。
5 结论
针对悬浮式深弹反鱼雷武器系统受其固有的射程、射界等因素限制,在作战使用中无法对所有态势下的来袭鱼雷均进行拦截的问题,本文提出了该武器系统有效拦截域的概念。又根据系统作战流程和功能特点,将其细化为时间域和空间域两方面判据。并依据系统工作原理,构建了完全基于实际作战中可以获取的战场态势等信息计算系统有效拦截域的数学模型,具体给出了一个计算实例。研究结果可进一步丰富相关的理论研究,并为其作战使用中指挥员科学快速决策提供一定参考。
[1]黄鑫,马曲立,曹阳.水面舰艇鱼雷防御系统近期发展趋势[J].舰船科学技术,2011,33(2):10-13.
[2]田恒斗,金良安,迟卫.尾流自导鱼雷对抗技术现状与研究[J].火力与指挥控制,2010,35(10):36-39.
[3]陈春玉.反鱼雷技术[M].北京:国防工业出版社,2006.4. [4]王国伟.鱼雷报警与拦截技术研究[D].哈尔滨:哈尔滨工程大学,2003.
[5]樊洪港,吴晓海,尤廷悦.悬浮式深弹反鱼雷系统作战效能分析[J].舰船电子工程,2009,29(10):44-47.
[6]姚奉亮,贾跃,丁贝.悬浮式深弹拦截不确定型鱼雷作战模型研究[J].鱼雷技术,2011,19(1):63-67.
[7]田恒斗,侯宝娥,赵红光,等.悬浮式深弹反鱼雷武器系统作战效能试验评估方法[J].火力与指挥控制,2014,39(9):122-125.
[8]赵向涛,李文哲,寇祝.悬浮式深弹拦截鱼雷射击区域分析[J].四川兵工学报,2011,32(11):20-22.
[9]闫岩,赵向涛.一种舰载反鱼雷深弹武器系统设想[J].四川兵工学报,2015,36(9):38-40.
Analysis of Effective Intercepting Domain of Hovering Depth Charge Anti-torpedo Weapon System
TIAN Heng-dou,HOU Bao-e,ZHAI Dong-min,FANG Yi
(Unit 91439 of PLA,Dalian 116041,China)
It is necessary to evaluate quickly the performance of interception of the hovering depth charge anti-torpedo weapon system.The concept of effective intercepting domain is presented and divided into two parts:time domain and spatial domain according to the operation flow and working principle.A mathematical model is proposed to determine the effective intercepting domain of the weapon system based on the battlefield situation.A calculation example shows that the mathematical model can be applied as a reference for weapon system’s operational application.
anti-torpedo weapon system,hovering depth charge,intercepting domain,mathematical model
TJ65
A
1002-0640(2017)03-0013-04
2015-12-13
2016-01-07
海军专项科研基金资助项目
田恒斗(1981- ),男,山东淄博人,博士。研究方向:作战系统试验总体技术等。
猜你喜欢
小哥白尼(军事科学)(2021年8期)2021-11-22
汽车观察(2021年4期)2021-05-10
指挥控制与仿真(2020年3期)2020-06-08
工业设计(2019年9期)2019-11-04
文萃报·周二版(2019年46期)2019-09-10
数字海洋与水下攻防(2019年2期)2019-06-28
舰船电子对抗(2019年2期)2019-05-23
汽车维护与修理(2016年10期)2016-07-10
汽车维护与修理(2016年3期)2016-02-28
小学生·多元智能大王(2015年3期)2015-05-25
