基于改进人工鱼群算法的碾压混凝土坝粘弹性参数反演
2017-04-21 02:40路志阳周兰庭
三峡大学学报(自然科学版) 2017年2期
路志阳 周兰庭 高 迪
(1. 河海大学 水利水电学院, 南京 210098; 2. 山东黄河河务局 聊城黄河河务局, 山东 聊城 252000)
基于改进人工鱼群算法的碾压混凝土坝粘弹性参数反演
路志阳1周兰庭1高 迪2
(1. 河海大学 水利水电学院, 南京 210098; 2. 山东黄河河务局 聊城黄河河务局, 山东 聊城 252000)
为合理模拟碾压混凝土坝自身流变特点,择取适当模型作为坝体和坝基材料持载变形下本构关系,建立有限元方程,使大坝变形与其物理力学参数的隐性对应关系明确化.在实测大坝位移变形资料的基础上,运用统计模型提取各所需位移分量,建立优化反演目标函数,采用相对于基本人工鱼群算法(AFSA)全局优化能力更加高效精准地改进人工鱼群算法(IAFSA)对碾压混凝土坝粘弹性力学参数进行搜索反演,并对二者的寻优结果做出对比分析,IAFSA算法的优越性得到证实.反演求解计算过程通过对改进人工鱼群算法的程序化语言设计结合ANSYS有限元计算命令的调用来实现.文末工程实例计算数据成果证明,本文反演方法可应用于坝工结构反分析领域.
碾压混凝土坝; 粘弹性参数; 改进人工鱼群算法; 反演分析
碾压混凝土坝(RCCD)层层碾压浇筑的施工方式使得坝身产生较多的施工层面,且蓄水服役期内坝体长期处于复杂应力状态之下,造成坝体在工作过程中表现出显著的流变特征.为监控大坝安全运行,时刻掌控坝体运行状态,有必要确定出碾压混凝土坝的力学参数[1].经验表明,一般所用的实验室试验法和现场测试法工作量大,局限性强,确定的力学参数与实际情况偏差较大.若对大坝原型数据资料作出针对性处理,并结合优化算法逆推坝体及地基的物理力学参数,即可作为一种反分析(反演)方法有效解决这些问题,这也得到工程界的普遍认可和应用[2-4].利用反演方法求解力学参数,优化算法的选取是关键.90年代以来一些常规的优化方法,如遗传算法、模糊系统理论和人工神经网络等被先后应用到反分析工程界中,但常带来收敛慢、精度要求不能满足且不易取得全局最优等问题.考虑至此,人工鱼群算法被引入到重力坝的力学参数反分析中,并取得较好效果[5].它使用简便,运算过程中可以避免局部极值而易得全局极值,收敛速度快且操作灵活,但也存在缺陷不足.对此,本文参考文献[6-7]的做法,对早期的人工鱼群算法作出改进,以克服先前缺点,并将改进的人工鱼群算法通过计算机语言代码编写出运算程序,用作于本文RCCD粘弹性力学参数的寻优计算过程.
1 碾压混凝土坝计算模型
1.1 碾压混凝土坝粘弹性本构模型
在近些年来有关碾压混凝土坝服役期间的工程实测资料及现场流变试验结果中,坝体和坝基在蓄水工作时的粘弹性特性得到充分体现[8],因此本文参选广义kelvin(三参量)模型来描述碾压混凝土坝体材料的这种受力变形特点.其本构方程为:
(1)


图1 广义开尔文模型
1.2 有限元计算模型
将作为连续空间结构的坝体离散成有限个单元结构,确立结点位移{δ}与结点荷载{R}的有限元方程[9]:

(2)
整体劲度矩阵[K]的表达式为:
(3)
式中,[D]为弹性矩阵,可由包括弹性模量、剪切模量及泊松比等在内的弹性常数表示,[B]为单元几何矩阵,描述单元的几何属性.
考虑到粘弹性应变增量,结合有限元平衡方程组,得到:

(4)
式中,{Δu}为结点位移增量;{ΔR}为结点在外力变化下的荷载增量;{ΔR′}为结点在粘性应变下的荷载增量.

(5)
2 反分析原理和方法
碾压混凝土坝在某时刻变形依照成因各异可分为3个部分:水压分量、温度分量和时效分量.则大坝的位移可表示为:
(6)
式中,δH为水压分量;δT为温度分量;δθ为时效分量.三者的统计模型表达式分别为:
(7)
(8)
(9)
式中,ai为水压分量拟合系数;b1i、b2i为温度因子拟合系数;c1、c2为时效因子拟合系数;i为水头指数;m为项数,一般对重力坝m=3,拱坝m=4;H为观测日水深;H0为起测日水深;n=1,2对应年周期、半年周期;t为测点观测时间,以d为单位;t0为测点计算时间,以d为单位;θ、θ0分别表示不同时段的时间指数.特别指出的是,式(8)为仅有气温资料情况下的温度分量计算公式,且资料分析表明,拟合效果较好.
为使反演过程更加简单快捷,可将坝体粘弹性参数的反演按步骤依次完成,先利用水压分量δH反求瞬时弹模Ev、El,需从位移总量δ中提取水压分量δH,可将式(8)、(9)代入,利用统计公式完成,水压分量δH可表示为:
(10)
选取实测资料起始阶段,大坝尚未发生粘性变形,将不同时刻的δH作为反分析目标,来反求瞬时弹模Ev、El,不同时刻施加水压外力P,大坝弹性位移δH与各弹性参数之间的关系式记为:
(11)
(12)
(13)
(14)

上述待定量的反分析寻优求解可以概括为:在给出的可行域Ω约束条件下,求出使得式(14)所示的目标函数F(Q)取得极小值的设计变量Q的最优解.可利用智能优化方法求解.最优化领域内优化方法众多,本文考虑引入作出优化改进的人工鱼群算法,用以解决所提及的优化反演问题.
3 改进的人工鱼群算法
3.1 基本人工鱼群算法(AFSA)
人工鱼群算法(AFSA)启发于仿生学原理,是一种通过仿真鱼类社会活动以达到最优目标值搜索目的的群体智能算法,最开始由李晓磊[10]等人创立,它的寻优过程主要经过算法的计算机程序命令生成人工鱼群来仿真真实鱼群的觅食、聚群和追尾等行为来实现.各人工鱼个体的状态表示为向量X=(x1,x2,…,xn),其中xi(i=1,2,…,n)为欲寻优之变量,人工鱼当前所在位置的食物浓度表示为Y=F(X)(即目标函数值);人工鱼个体i,j间距表示为dij=‖Xi-Xj‖.AFSA算法设立公告牌用来记录最优人工鱼状态并进行实时更新,它包含5个基本参数,分别为视野范围Visual(表示人工鱼的觅食行为只能在此感知距离内发生)、可移动步长Step、人工鱼总数Np、试探次数TryNumber和拥挤度因子δ,算法最终收敛性能的好坏取决于这5个参数是否得到合理配置.总体而言,AFSA算法主要通过4种移动行为的执行来实现寻优,行为描述如下:
(15)
式中,k=j、c、max分别对应随机、中心、最优3种状态;Rand()在(0,1)内随机取值.nf为当前可视域内可探索的人工鱼数目.
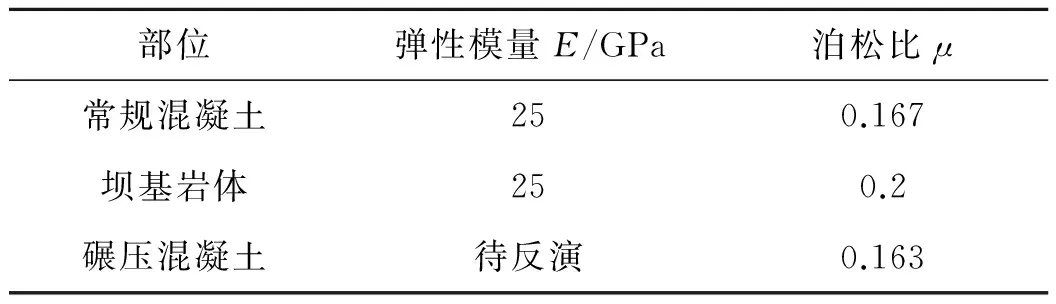
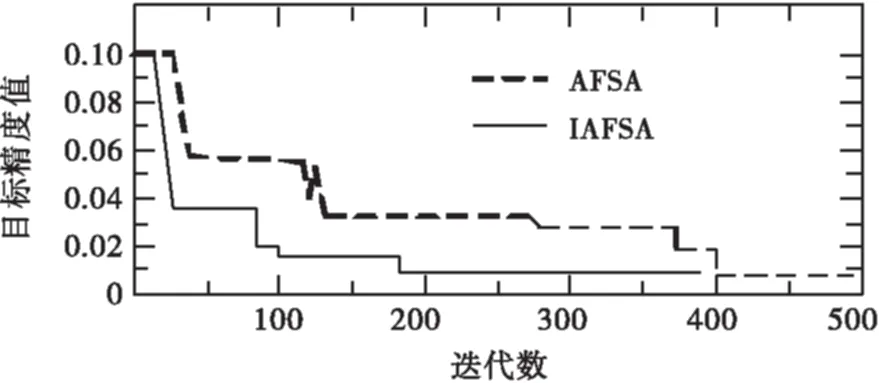
当k=j时,执行的是觅食行为,由于是随机状态,执行条件为Yi 当k=c时,执行的是聚群行为,表明中心位置优于当前位置,Xc、Yc分别指鱼群中心位置及对应中心值; 当k=max时,执行的是追尾行为,表明伙伴Xmax位置优于当前位置,Xmax、Ymax分别指最优伙伴及对应最优值; 以上3种情况均不满足时,重新执行觅食行为. 3.2 改进的人工鱼群算法(IAFSA) AFSA算法虽有突出优点,但也存在有待改进的地方,如随着人工鱼增多需更多存储空间和更大计算量、随机行为的存在造成后期运行时搜寻目标不明确、寻优精度难以保证及运算效率低等,这对搜索质量造成不良影响.为解决这些问题,对标准的人工鱼群算法作出如下改进. 3.2.1 人工鱼视野和步长的改进 寻优结果有时出现精度不高的情况,主要因为算法在运行中存在随机行为,特别是视野和步长也是随机选择的.而人工鱼的搜索能力和收敛速度受视野、步长大小的影响较大.为保证算法收敛速度与精度,按(16)式对视野Visual和步长Step作出动态调整: (16) 其中,k为当前迭代数;Visualmin、Stepmin分别为视野范围与步长的最小值. 3.2.2 觅食行为的改进 同视野与步长类似,人工鱼在觅食过程中的下一步移动是随机进行的,这对精确解的搜索造成干扰.对此,可作如下改进:在对比过程中留存较优解,经尝试TryNumber次以后,若依然未达到前行条件,那么向较优解方向前行一步,这种做法可避免鱼群最优个体发生退化,解除随机行为带来的干扰. 3.2.3 移动策略的改进 在AFSA中,聚群和追尾行为是相互独立、互不联系的.如果当前状态人工鱼达到朝中心值Yc或最优值Ymax中任一值前行的条件,那么就执行相应的移动行为,即向该值前进一步;否则执行觅食行为.可以看出,人工鱼在传统算法中移动,计算量大且寻优效率低.对此,对算法的移动策略进行改进:当前值Yi与最优值Ymax均小于中心值Yc时,执行聚群行为;当前值Yi与中心值Yc均小于最优值Ymax时,执行追尾行为;1、2情况之外,执行觅食行为. 通过这种改进办法,全局最优值得以更快突现. 本文设计出与改进人工鱼群算法(IAFSA)相应的VB语言嵌套调用程序,并利用ANSYS中程序开发工具APDL结合有限元计算进行二次开发,以完成对待求流变参数的求解,主要计算过程如下: 1)将待反演的粘弹性参数Q用人工鱼个体的状态表示,确定算法的5个基本参数(即Visual、Step、Np、TryNumber和δ)初值; 2)在参数Q的可行域Ω内,构造Np个人工鱼个体,并作初始化处理,使之在可行域内随机分布; 3)式(14)中的目标函数F(Q)用人工鱼即时位置处的食物密度表示,计算人工鱼适应度值(或目标函数值),然后和公告牌的状态作比较,如果自身状态较优,那么更新公告牌状态为自身状态; 4)动态调整视野Visual和步长Step; 5)对各人工鱼选择已改进的当前最优行为策略并执行,计算目标函数值,分别与其视野范围内中心值和最优值作对比,并更新位置; 6)判别循环结束条件是否达到,如果是,则输出结果,否则转3). 3.3 改进人工鱼群算法参数反演过程 利用IAFSA算法反演碾压混凝土坝力学参数的程序步骤如图2所示. 图2 粘弹性力学参数反分析程序步骤图 结合某重力坝的实测资料进行力学参数反演,该坝体最大坝高160 m,坝顶高程1 424 m,坝顶长640 m,坝顶宽26 m.选取河床部位8号坝段(断面0+214至断面0+248)进行分析,该坝段筑坝材料沿坝高各异,分两个分区浇筑,分别是碾压混凝土RCC1(配比C9020W6F100)和RCC2(配比C9015W6F100),坝体和岩基材料参数取值见表1.选取沿坝高程5个测点A08-PL-01(1 424 m)、A08-PL-01(1 388 m)、A08-PL-02(1 359 m)、A08-PL-03(1 320 m)和A08-PL-03(1 292 m)水平位移监测时间序列作为参数反演计算依据. 表1 坝体和岩基材料参数取值 选定水位变化时段(2011年5月28日~2011年9月4日)作为分析时间段,该时段内库水位从1 397.75 m升至1 415.3 m,分别作为有限元计算模型始末时刻的水荷载,同时以该时间段内该坝段坝顶测点的实测资料作为坝体参数的反演依据.根据工程经验给出的各弹性模量和粘性系数的取值区间见表2.由有限元计算模型结合改进的人工鱼群优化算法按照程序步骤图1进行待反演参数的求解. 为证明改进算法的普遍有效性和优越性,运用IAFSA算法对待求参数进行20次独立随机搜索,同时针对基本AFSA算法作出类似工作以作对比,迭代结束的精度控制为0.01.设置人工鱼个体总数Np=200,对所构造的人工鱼进行初始化操作,使之在可行域内随机分布,设置人工鱼觅食最大尝试次数TryNumber=50,总迭代数为50,Visualmin=1.5,拥挤度因子δ=0.627.对于Visual、Step等参数的取值,需经运算测试并随迭代进行而作动态调整,初步给定参数Visual=2.5,Step=0.3为初始值.IAFSA算法与AFSA算法的搜索结果见表2.图3是控制精度下利用此两种算法计算目标值的迭代过程对比图. 表2 两种人工鱼群算法寻优结果对比 图3 两种算法迭代过程的比较 从图3可以看出,同样控制精度下,IAFSA算法所用迭代步数要比AFSA算法少1/2左右,同时前者在寻优过程中未受到局部极值影响,寻优精度相对而言更精确.表2的结果表明,经过改进的人工鱼群算法对于参数寻优收敛的成功率更高,并且搜索时间大大减少,效率更高.显然,经过改进的人工鱼群算法的优化精度和计算效率比传统的人工鱼群方法的更高. 表3 待求参数取值区间及IAFSA算法反演结果 为进一步验证IAFSA算法反演结果的准确性,以所得结果值(见表3)为已知值对该重力坝不同高程处测点的位移进行有限元计算,计算结果与实测值作对比,结果见表4.从表4可以看出,二者相对误差较小,说明了计算结果的合理性和反演方法的可行性. 表4 不同高程测点实测位移值与计算位移值 1)本文充分利用实测资料,采用先简后繁的分步反演方法提高了参数求解效率,引入统计回归模型,使理论体系结合工程实际,问题解决方法科学、合理. 2)两种算法的运行结果表明,原人工鱼群算法在优化改进之后很大程度上提高了搜索水平,使得后期的目标搜索更加明确,搜索质量和效率得到改善,可作为一种优质高效的反分析工具应用于参数的优化反演中. 3)工程实例计算结果的正确性验证了本文反分析方法的可行性,可向其他工程反演领域做进一步推广. [1] 吴中如.水工建筑物安全监控理论及其应用[M].北京:高等教育出版社,2003. [2] 黄光明,李 云,顾冲时,等.碾压混凝土坝横观各向同性粘弹性参数反演[J].水利水运工程学报,2006(4):15-20. [3] 李 波,韦娟辉,侯宪东,等.基于PSO的混凝土坝粘弹性力学参数反演[J].人民长江,2009,40(3):91-93. [4] 牛景太.基于混沌遗传算法的碾压混凝土坝力学参数反分析[J].南水北调与水利科技,2012,10(4):140-143. [5] 宋志宇,李俊杰.重力坝弹性参数反演的灵敏度分析及一种新的反演算法[J].四川大学学报(工程科学版),2006,38(4):34-38. [6] 王联国,洪 毅,赵付青.一种改进的人工鱼群算法[J].计算机工程,2008,34(19):192-194. [7] 吴月萍,杜 奕.改进的人工鱼群算法的参数分析[J].计算机工程与应用,2012,48(13):48-52. [8] 顾冲时,吴中如.大坝与坝基安全监控理论和方法及其应用[M].南京:河海大学出版社,2006. [9] 吴中如,顾冲时.大坝原型反分析及其应用[M].南京:江苏科学技术出版社,1999. [10] 李晓磊,邵之江,钱积新.一种基于动物自治体的寻优模式:鱼群算法[J].系统工程理论与实践,2002,22(11):32-38. [责任编辑 周文凯] Inverse Analysis of Viscoelastic Parameters of Roller Compacted Concrete Dam Based on Improved Artificial Fish School Algorithm Lu Zhiyang1Zhou Lanting1Gao Di2 (1. College of Water Conservancy & Hydropower Engineering, Hohai Univ., Nanjing 210098, China; 2. Branch of Yellow River Shandong Bureau in Liaocheng,Liaocheng 252000, China) To simulate the rheological properties of roller compacted concrete dam (RCCD),generalized Kelvin model is selected to describe the constitutive relation of dam material; and then a finite element computing model is built; so that the relationship between dam displacement and its viscoelastic mechanics parameters is figured out. Based on measured data, using statistical model to separate out the water pressure component and aging component, the objective function is built; and the improved artificial fish school algorithm(IAFSA),which has more efficient and accurate ability of global optimization compared with the artificial fish school algorithm(AFSA),is adopted to the inversion of viscoelastic mechanics parameters. The optimization results of contrastive analysis prove the superiority of IAFSA. The process of inversion is realized by VB programming design for IAFSA combined with calling the calculation command of ANSYS. The achievements of the engineering project at the end of the text prove that the inversion method can be applied to back analysis field of dam structure. roller compacted concrete dam; viscoelastic parameters; improved artificial fish school algorithm; inverse analysis 2016-10-14 国家自然科学基金资助项目(51209078) 周兰庭(1975-),女,副教授,研究方向为大坝安全监控.E-mail:ltzhou@hhu.edu.cn 10.13393/j.cnki.issn.1672-948X.2017.02.001 TV642.2 A 1672-948X(2017)02-0001-05
4 实例应用



5 结 论
猜你喜欢
湖南理工学院学报(自然科学版)(2022年1期)2022-03-16
建材发展导向(2021年19期)2021-12-06
数学物理学报(2021年5期)2021-11-19
黑龙江水利科技(2020年8期)2021-01-21
应用数学(2020年2期)2020-06-24
中外文摘(2017年19期)2017-10-10
中国工程咨询(2017年9期)2017-01-31
电测与仪表(2016年3期)2016-04-12
电测与仪表(2016年20期)2016-04-11
橡胶工业(2015年5期)2015-08-29