基于快速控制原型的ABS实验台控制系统
2017-04-21 00:44:10华帆帆孙跃东
电子科技 2017年4期
华帆帆,孙跃东,周 萍
(上海理工大学 机械工程学院,上海 200093)
基于快速控制原型的ABS实验台控制系统
华帆帆,孙跃东,周 萍
(上海理工大学 机械工程学院,上海 200093)
针对ABS实验台控制器的设计与开发,利用Matlab/Simulink建立ABS实验台控制模型,并进行离线仿真得到理论制动曲线。基于dSPACE的快速控制原型半实物仿真实验设计,在RTI实时接口中将控制模型下载到Autobox中,并在实验管理软件Controldesk中设定数据及进行实验。实验结果表明,所设计的ABS控制器得到的控制效果和离线仿真结果基本一致,验证了控制器的可行性。快速控制原型的方法为控制器的开发提供了一种新思路,减少了开发周期,节约了开发成本。
ABS实验台;dSPACE实时仿真;快速控制原型;RTI实时接口
汽车防抱死制动系统(ABS)是提高主动安全性能的主要技术,因此对ABS装置的研发是汽车电子装置研究开发的重点,但是由于我国研发起步较晚以及掌握的核心技术不足,需要尝试不同的控制方法来进行制动试验用于测试所设计控制器的控制策略[1]。
现阶段,快速控制原型方法已经广泛的应用在控制系统设计的初期阶段[2],运用dSPACE实时仿真系统可以快速有效地创建模型并验证控制策略的可行性,它可以实现在没有控制器硬件的条件下进行控制算法的设计和优化,达到软硬件并行工程的目的,最终减少开发周期,节约开发成本[3]。
1 ABS实验台工作原理
1.1 ABS实验台硬件总体布局
实验台基于MK20-I型ABS系统,主要零部件配备的是帕萨特新领驭的原装车部件,另外也安装了动力驱动传动系统,电子电脑控制系统。实验台由三相异步电动机实现驱动,并通过变频器改变频率使电动机转速发生变化[4],模拟各工况下的行车速度。利用磁粉离合器实现地面对车轮的制动作用,同时也模拟部分运动惯量[5]。用灰口铸铁制作的惯性飞轮模拟车辆的惯量。实验台总体布局如图1所示。

图1 ABS实验台总体布局图
1.2 汽车制动过程分析
(1)汽车制动过程受力分析。汽车在道路上行驶,踩下制动踏板时,受到的阻力之和为
F=Fb+Ff+Fw
(1)
其中,F是汽车受到的总阻力;Fb是地面制动力;Ff是车轮滚动阻力;Fw是空气阻力。而在实际运算过程中发现,空气阻力与滚动阻力比地面制动力小很多,可以忽略不计,因此
F=Fb
(2)
(2)汽车制动时车轮运动分析。

图2 车轮受力示意图
汽车车轮在平整路面制动时的受力情况如图2所示。根据合力矩定理可得
Mb=Jw×ε+Fb×r
(3)
其中,Mb是制动器制动力矩;Jw是车轮转动惯量;ε是车轮角减速度;r是车轮半径;
(3)ABS实验台上车轮运动分析。以实验台车轮部分为研究目标,它在制动时受到磁粉离合器传递的扭矩、制动器制动力和惯性力矩的作用,受力分析图如图3所示。
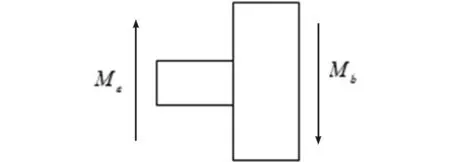
图3 实验台受力示意图
实验台制动盘阻力因素的影响较小,可以忽略不计,因此实验台的力矩方程为
Mb=Me+Jb×ε′
(4)
其中,Me是离合器传递的力矩;Jb是制动盘转动惯量;ε′是实验台制动盘角速度。
在实验台上,定义所测量的车轮制动力所占整车制动力的比例为k,得到
(5)
其中,φ是道路附着系数;b是质心到后轴的距离;L是轴距;hg是质心高度。
在实际制动过程中,汽车的前轮与后轮都不会发生抱死状况,由于假设的汽车车轮角减速度和实验台的车轮角减速度一致,即ε=ε′,由式(3)~式(5)可化简得到实验台制动时磁粉离合器传递力矩的数学表达式
(6)
公式表明,在路面附着系数不变的前提下,ε为变量,其他参数都是常量,因而通过传感器测得轮速信号后,就可以实现磁粉离合器的控制。
2 ABS快速控制原型软件设计
在汽车控制系统的开发过程中,通常采用的是V模式开发流程,其基本开发过程分为:功能设计与离线仿真、快速控制原型(RCP)、代码生成、硬件在环仿真(HIL)、标定与匹配,这也形成了从产品功能设计、控制策略软件编程、可靠性测试及标定的汽车电控系统开发一体化的解决方案[6]。
2.1 控制系统开发工具
控制系统的设计,主要是借助于Matlab/Simulink和dSPACE实时仿真系统来完成。Simulink是Matlab的重要模块之一,它采用图形化编辑语言,所设计的程序也是以框图的形式展现,其操作简单、结构流程清晰、适应性强,已广泛应用于控制理论的建模和仿真。而dSPACE实时仿真系统是德国dSPACE机电控制技术公司设计的系统开发和测试工作台,是一套先进的软硬件结合系统[7]。dSPACE实时仿真系统的主要部件有:处理器板卡DS1005、I/O接口板卡DS2211以及Autobox处理器3部分[8]。处理器和板卡接口是用32位的PHS总线方式来通信的,这种方式专为实时应用服务。DS2211是硬件在环中的I/O接口板卡,能够对信号进行相应的转换。DS1005板卡是建立在Matlab/Simulink上开发的实时仿真处理器,通过Matlab/Simulink及dSPACE的实时接口库(RTI)就可以完成dSPACE的编程。
2.2 仿真模块设计
控制系统模块主要实现的功能是对电动机的闭环控制和对磁粉离合器的开环控制。先测量得到传感器输出的信号,再通过电脑的计算分析得到实际的控制信号数据,向电动机和磁粉离合器输入控制信号,就能达到对电动机和磁粉离合器控制的目的。实验台总控制模型如图4所示。实验台控制模型中主要包含2个子模块,分别为磁粉离合器控制模块和电动机控制模块[9]。
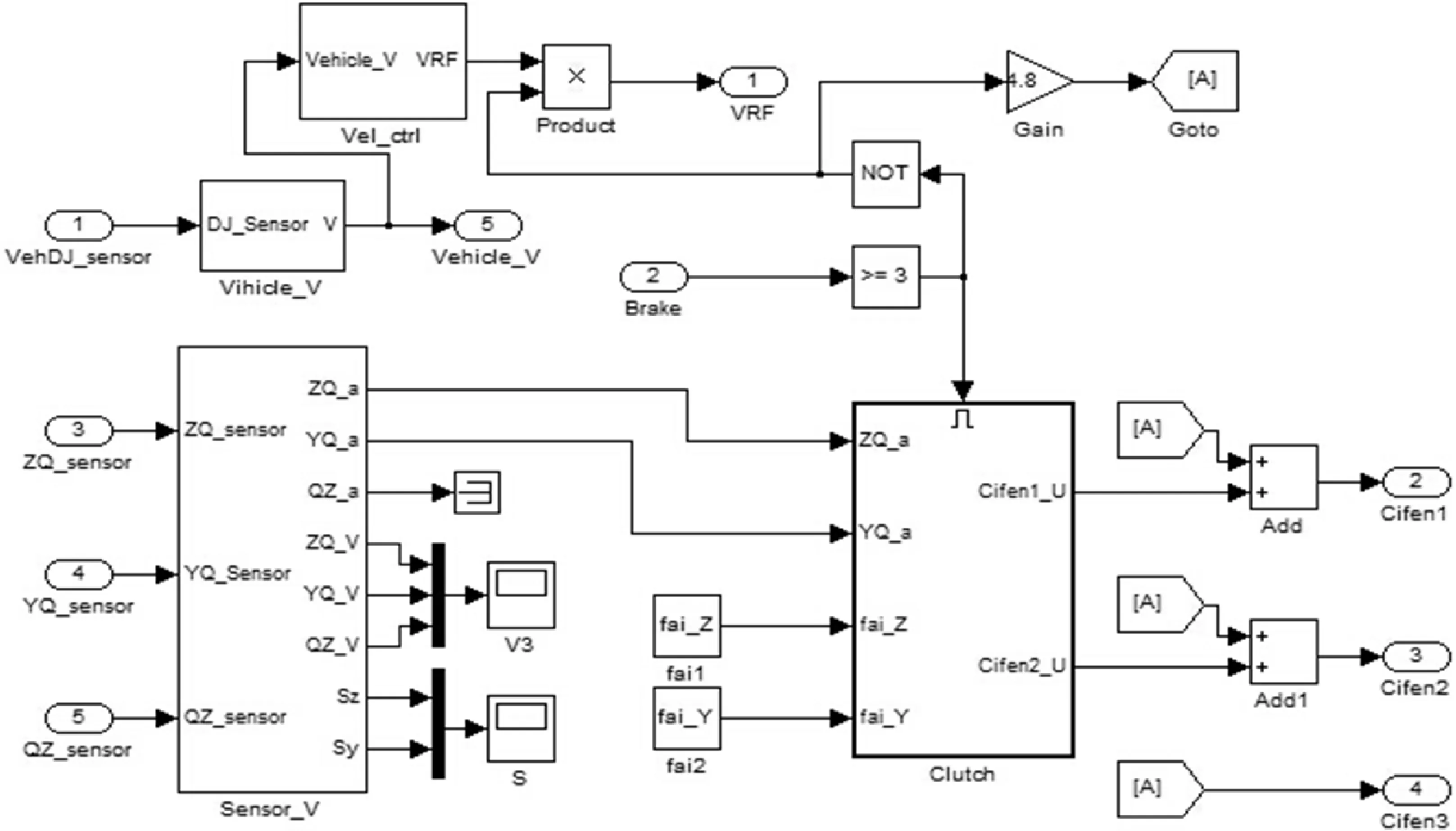
图4 ABS实验台控制模型
磁粉离合器是利用通电过程中磁粉间产生相互作用的抗剪力来传递扭矩,它与激励电流的大小成正比,因此,磁粉离合器可以作为一个线性元件来使用[10]。在磁粉离合器控制系统中,先利用光电传感器测得轮速信号,将信号传递给Autobox进行转换,计算得到角减速度,再由式(6)计算所需要的离合器力矩,从而确定应该输出给磁粉离合器的电流,实现扭矩的传递。
电动机控制系统要实现的作用是:在踩下制动踏板时,轮速信号被轮速传感器采集,并输送给DS2211板卡,由DS2211板卡进行信号转换后传递至DS1005处理器板卡,控制系统对所测得信号计算,得到反馈信号。通过车速的反馈信号和目标车速的对比获得一个偏差信号,再利用PID进行信号整形处理,经I/O板卡的D/A转换后发送给通用变频器,改变三相异步电动机的频率实现对车速的模拟,最终使实验台得到所需的车速。电动机控制模块是一个闭环控制,为使控制系统能够准确地调节发动机转速,对信号采用了PID处理[11]。PID控制一般分为位置式PID控制和增量式PID控制,位置式PID算法的数学表达式为
(7)
式中,k是采样顺序,k=0, 1, 2,…;u(k)是第k次采样时刻的输出值;e(k)是第k次采样时刻输入的偏差。
在式(7)中的控制算法要求对e(k)进行叠加,导致运算量加大,不利于计算,因此通常情况下不采用位置式PID控制算法,而是采用增量式PID控制算法。对式(7)运用递推原理,得到新的表达式
u(k)=Kpe(k)+Ki(k)+Kd[e(k)-e(k-1)]
(8)
式中,u(k)=u(k)-u(k-1);e(k)=e(k)-e(k-1)。
采用增量式PID算法时,输出量u(k)代表的是该次执行机构位置的增量,它的实际控制量由软件来实现。在经过PID处理后得到一个变化的电压,输入给变频器VRF端,从而改变变频器频率,最终控制实验台速度[12]。
3 实验设计与结果分析
3.1 快速控制原型实验设计
本文设计利用装备了MK20-I型ABS系统的实验台,并用它作为快速控制原型的硬件组成,进行实验研究[13],对Simulink设计的控制系统进行测试及分析。实验台的主要部件如表1所示。
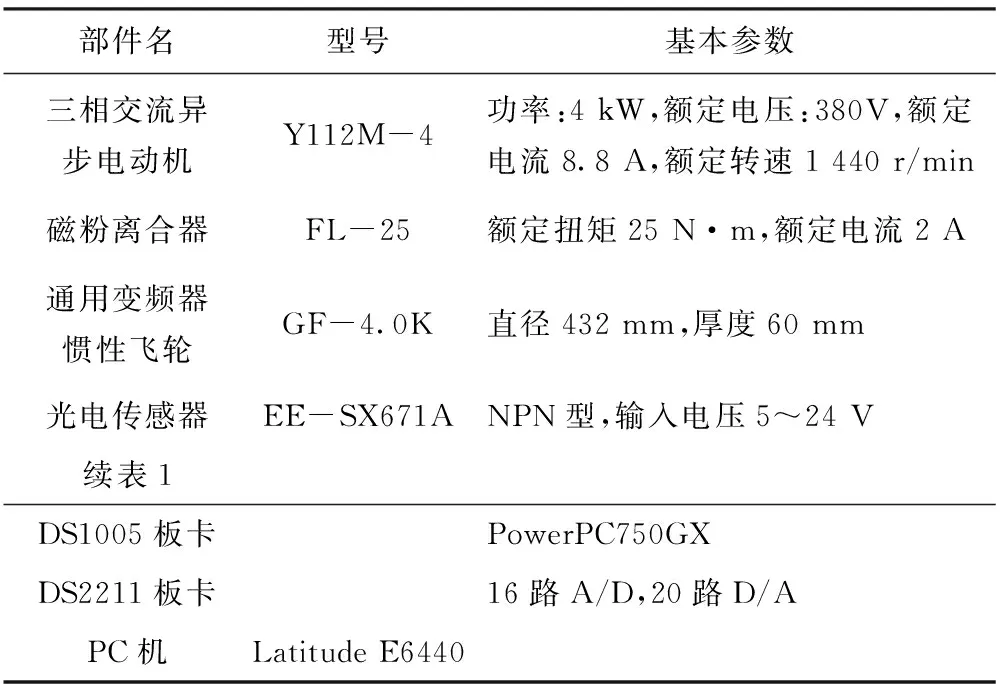
表1 快速控制原型实验台组成
进行实验时,运用到的是DS2211板卡的7路A/D和4路D/A通道,必须保证实验台输出信号接口和实时仿真接口相一致,因此设计了一条如图5所示的线束。

图5 DS2211板卡接口通道示意图
在利用dSPACE和Matlab的实验环境中,RTI(Real-Time Interface)和RTW(Real-Time Workshop)是dSPACE快速开发的基础[14]。dSPACE的RTI接口是对Simulink库的扩展,通过它可以完成I/O接口和初始化过程设置。将带RTI实时接口的实验台控制模型下载到Autobox中,利用dSPACE中的管理软件Controldesk就能进行实验的建立及数据的设定[15]。dSPACE实时仿真实验的步骤如图6所示。
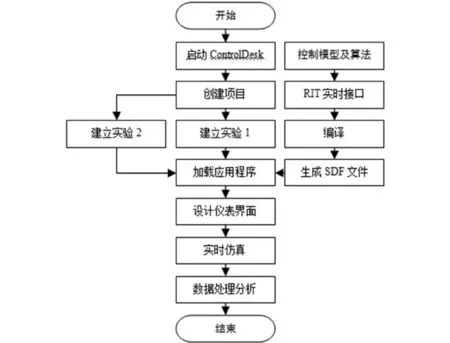
图6 实验建立步骤
根据实验要求的需要,可以在Controldesk中创建实验界面,设定各参数的初始值,完成这些操作后就可以进行制动实验了,而利用Controldesk中的示波器工具就能够直观地看出实验台制动时的车速及车轮变化状况。
3.2 实验结果及分析
在开始制动实验时,必须先完成PID参数的设定。在系统调试后,最终确定PID参数:Kp=40;Ki=270;Kd=1.75。选取50 km/h的初速度在附着系数为0.75的沥青路面和附着系数为0.5的碎石路面条件下分别进行实验,实验结果如图7所示。

图7 制动实验结果
通过对图7的进行结果分析,表明实验台可以实现制动作用,但是制动时间比理论略长,这主要是制造误差产生的影响。而在汽车制动时,当附着系数较小,制动时间会相对延长,这可以在两图的对比下得到较好的反映。左前轮与右前轮制动曲线在理论情况下应该保持一致,但图中并没有重合,这是由于左右前轮被2个磁粉离合器分别控制,实验台的制造误差是出现这种状况的主要原因。在制动过程中,车速在制动力的作用下不断降低,最终完成制动,而车轮始终没有出现抱死现象,与实际制动情形相似,达到了ABS控制系统的设计要求。
4 结束语
本文通过对ABS实验台制动过程分析,利用Simulink创建控制对象模型,实现控制算法,再通过dSPACE构造ABS实验台控制系统的快速控制原型,并进行实验测试。实验结果表明,利用快速控制原型设计出的ABS控制系统可以很好地达成控制效果,并且能够实时地调整控制参数,这为ABS控制系统的开发提供了一种新的思路,缩短了控制系统开发周期,节约了开发成本,提高了效率。
[1] 李果.车辆防抱死制动控制理论与应用[M].北京:国防工业出版社,2009.
[2] 丁荣军.快速控制原型技术的发展现状[J].机车电传动,2009(4):1-4.
[3] 于金泳,刘志远.基于快速控制原型的ABS控制器开发[J].汽车技术,2006(12):20-24.
[4] 段亮,莫锦秋,曹家勇.基于变频器的异步电机离线参数辨识[J].电机与控制应用,2011(7):38-43.
[5] 段文洁,朱凤琴,张淳.磁粉离合器在大转动惯量设备中的应用及PLC控制[J].机械设计与制造,2006(4):126-128.
[6] 邹明红,丁能根,王伟达,等.ABS“V模式”开发中的快速控制器样件制作和硬件在环仿真的研究[J].汽车工程,2009(4):357-361.
[7] dSPACE.MABXII AC motor user guide[M].CA,USA:dSPACE Inc.,2012.
[8] dSPACE.Real-time interface(RTI and RTI-MP) implementation guide[M].Paderborn:dSPACE CnnbH,2001.
[9] 何玉娴,李伯全,田洪胜.汽车电子机械制动系统的ABS控制策略与仿真分析[J].制造业自动化,2012(5):24-27.
[10] 刘建建,陈祝平.磁粉离合器及其应用[J].机电技术,2010(4):63-65.
[11] 臧怀泉,李卫华,李振鹏.基于模糊PID的汽车防抱死制动系统控制策略的研究[J].公路交通科技,2006(11):137-140.
[12] 殷海蒙,高艳霞,江友华.大功率交流电动机转子变频调速系统的分析[J].电机与控制应用,2006(6):51-55.
[13] 刘俊,陈无畏.基于快速控制原型的电动助力转向控制系统的研究[J].汽车工程,2009(7):634-639.
[14] 雷叶红,张记华,张春明.基于dSPACE/Matlab/Simulink平台的实时仿真技术研究[J].系统仿真技术,2006(3):131-135.
[15] dSPACE.Control desk experiment guide [M].Paderborn:dSPACE GmbH,2003.
Research of ABS Test-bed Control System Based on Rapid Control Prototype
HUA Fanfan,SUN Yuedong,ZHOU Ping
(School of Mechanical Engineering, University of Shanghai for Science and Technology, Shanghai 200093, China)
This paper establishes the ABS test-bed control model using Matlab/Simulink and performs the off-line simulation to obtain the theoretical braking curve for the design and development of ABS test-bed controller. Based on the dSPACE rapid control prototype hardware-in-loop simulation experiment design, control model is downloaded to Autobox in RTI real-time interface; in addition, data is set and experiments are conducted in the experimental management software Controldesk. The results show that the control effect obtained by the designed ABS controller is basically consistent with the offline simulation results, which verifies the feasibility of the controller. The method of rapid control prototype provides a new idea for the development of the controller, shortens the development cycle and saves the development cost.
ABS test-bed; dSPACE real-time simulation; rapid control prototype; RTI real-time interface
2016- 05- 26
上海市研究生创新基金资助项目(JWCXSL1022)
华帆帆(1991-),男,硕士研究生。研究方向:汽车电子控制技术。孙跃东(1965-),男,博士,教授,博士生导师。研究方向:车辆动力系统及匹配技术,车辆发动机性能测试。
10.16180/j.cnki.issn1007-7820.2017.04.033
TP273;U463.5
A
1007-7820(2017)04-131-05
猜你喜欢
中国特种设备安全(2021年3期)2021-07-28 06:53:40
装备制造技术(2021年1期)2021-05-21 07:55:00
电站辅机(2021年4期)2021-03-29 01:16:52
机械制造与自动化(2021年1期)2021-02-03 10:55:20
测控技术(2018年3期)2018-11-25 09:45:46
测控技术(2018年12期)2018-11-25 09:37:42
湖北文理学院学报(2017年2期)2017-04-16 05:09:09
工业设计(2016年11期)2016-04-16 02:48:32
火控雷达技术(2016年3期)2016-02-06 02:30:33
铁路通信信号工程技术(2014年5期)2014-02-28 16:57:49