
基于iGMAS产品的BDS/GPS组合RTK定位性能分析
2017-04-20 01:22张铭彬王潜心厉姣姣
合肥工业大学学报(自然科学版) 2017年3期
张铭彬, 王潜心 , 厉姣姣,2
(1.中国矿业大学 环境与测绘学院,江苏 徐州 221116; 2.徐州市国土资源局,江苏 徐州 221000)
基于iGMAS产品的BDS/GPS组合RTK定位性能分析
张铭彬1, 王潜心1, 厉姣姣1,2
(1.中国矿业大学 环境与测绘学院,江苏 徐州 221116; 2.徐州市国土资源局,江苏 徐州 221000)
随着各国自主导航系统的快速发展,多卫星导航系统组合定位成为当前研究热点,其可弥补单系统在全球卫星导航系统(Global Navigation Satellite System,GNSS)信号遮挡严重区域无法提供连续、可靠的定位服务的不足。文章基于国际全球连续监测评估系统(international GNSS Monitoring & Assessment Service,iGMAS)产品,研究分析了中国北斗卫星导航系统(BeiDou Navigation Satellite System,BDS)与美国全球定位系统(Global Positioning System,GPS)组合实时动态定位(Real-Time Kinematic,RTK)性能。静态实验结果表明,开阔区GPS-RTK定位精度优于BDS、BDS/GPS组合RTK定位结果,封闭区BDS/GPS组合定位性能优于单系统定位精度,BDS定位结果优于GPS;动态实验结果表明,在信号遮挡严重区BDS/GPS组合可持续提供定位服务,但服务的可靠性较低。
国际全球连续监测评估系统(iGMAS);卡尔曼滤波;实时动态定位(RTK)
国际全球连续监测评估系统(international GNSS Monitoring & Assessment Service,iGMAS)的基本功能是数据监测采集、传输、贮存、分析与信息发布,其建设目的主要是为用户提供安全可靠的全球卫星导航系统(Global Navigation Satellite System,GNSS)服务[1]。iGMAS对外地址为http://124.205.50.178,用户可免费下载多系统高精度轨道、钟差等产品。
随着各国自主卫星导航系统的发展,截止2016年4月,美国全球定位系统(Global Positioning System,GPS)在轨卫星数为31颗,其中Block IIF型卫星12颗(11颗正常运行,1颗正在测试),Block IIR卫星12颗,Block IIR-M卫星7颗,新一代Block III即将升空;中国北斗卫星导航系统(BeiDou Navigation Satellite System,BDS)二代系统在轨卫星数达21颗,其中地球静止轨道(Geosynchronous Earth Orbit,GEO)卫星5颗、中轨(Medium Earth Orbit,MEO)卫星8颗(13号卫星出现故障)、倾斜同步卫星(Inclined Geosynchronous Satellite Orbit,IGSO)8颗;欧盟的Galileo系统除实验卫星外在轨卫星数达8颗;俄罗斯的GLONASS系统继“拯救GLONASS的补星计划”后,在轨卫星数为24颗。由此可以看出多卫星导航系统协同服务将是下一代全球定位系统的发展趋势。
目前BDS/GPS组合实时动态定位(Real-Time Kinematic,RTK)研究主要集中于2个方面:① BDS/GPS组合定位时数学模型研究,例如,文献[2-3]对组合RTK定位时混合观测方程进行了研究,文献[4]对组合定位的Kalman滤波算法进行了改进;② 对单频组合RTK定位性能的分析[5-6]。针对BDS/GPS定位算法研究中,在实验部分大多是对静态数据进行分析,对动态数据定位性能未进行比较,所使用的数据与产品是由国际GNSS服务组织(International GNSS Service,IGS)提供的,对于我国由iGMAS综合中心提供的产品精度与可靠性无验证意义。本文基于iGMAS综合中心提供的产品对BDS/GPS组合RTK定位性能进行分析。
1 数学模型
1.1 GNSS定位观测方程
GNSS定位伪距与载波相位基础观测方程[7]为:
(1)
(2)
BDS/GPS组合定位伪距与载波相位双差观测方程为:
(3)
(4)

BDS/GPS组合定位观测方程的矩阵形式为:
(5)
(6)

(7)
其中,dX为三维坐标改正量;ΔN为双差模糊度;下标B表示BDS卫星系统,G表示GPS卫星系统;Δl为双差观测值残差;(X0,Y0,Z0)为接收机近似坐标;(Xn(t),Yn(t),Zn(t))为卫星n的坐标(t)为卫星至测站的几何距离;λ为波长;t为历元时刻。
1.2 自适应EKF滤波
扩展Kalman滤波(extend Kalman filter,EKF)状态方程与观测方程[8]表达式为:
(8)
(9)
EKF的迭代算法为:
(10)
(11)
(12)
(13)
(14)
(15)
(16)
其中,Xk为状态向量;Zk为观测向量;Φk,k-1为状态转移矩阵;Γk,k-1为动态噪声转移矩阵;uk-1为控制向量;h(·)为非线性函数;Wk-1、Vk分别为动态噪声与观测噪声,其符合p(w)~(0,Qk)、p(v)~(0,Rk)正态分布,Qk为状态方程矩阵,Rk为观测方程矩阵。
状态向量Xk为:
状态转移矩阵Φk,k-1为:
(17)
其中,I3为3×3的单位矩阵。
系数矩阵Hk为:
(18)
其中
(19)
(20)

2 RTK定位结果与精度分析
本次实验基准站数据来源于中国矿业大学CORS站,其接收机型号为ThumbT300,流动站接收机型号为南方锐灵S-860。静态实验数据采集于中国矿业大学环境与测绘学院楼顶与4楼阳台,动态实验数据采集于中国矿业大学校园内,如图1所示,实验数据采集记录见表1所列。实验中所需产品均来自iGMAS综合中心,产品精度见文献[12]。实验数据处理软件为自主研发的Multi-GNSS定位软件;静态开阔区数据处理截止高度角为10°,封闭区高度角为5°,采样间隔为5 s,动态数据处理截止高度角为5°,采样间隔为5 s。静态观测时段卫星星空轨迹图与卫星可见数分别如图2、图3所示。

图1 实验数据采集现场图

接收机状态采样频率/Hz采样日期时间段(GPS时)开阔区12016⁃01⁃165:45—8:31封闭区12016⁃01⁃171:22—6:01车载动态52016⁃01⁃196:36—7:17
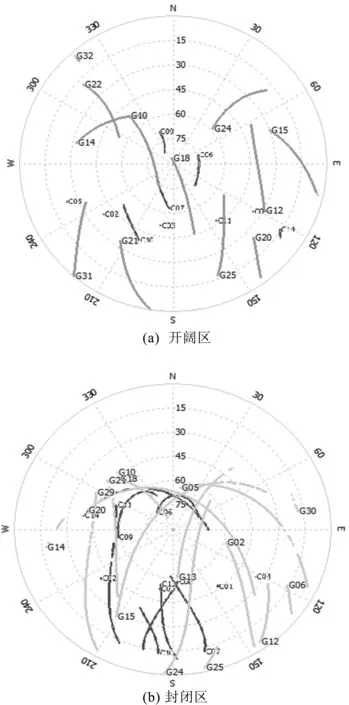
图2 静态观测时段卫星天空轨迹

图3 静态观测时段可见卫星数
2.1 静态封闭区实验数据分析
封闭区数据处理结果如图4所示。

图4 封闭区实验结果
选取BDS/GPS组合定位结果作为精度统计参考值,不同卫星系统定位结果均方根值(root-mean-square,RMS)见表2所列。

表2 封闭区不同卫星系统定位RMS误差分析 m
(1) GPS定位N、E、U 3个方向RMS在3 m以内;BDS定位N、E方向RMS在0.2 m以内,U方向在0.4 m以内;BDS/GPS联合定位N、E方向RMS在0.1 m以内,U方向在0.2 m以内。
(2) GPS定位误差最大偏差达到20 m,其定位可靠性严重降低。
(3) 封闭区GPS定位精度远低于BDS以及BDS/GPS组合定位精度,BDS/GPS组合定位精度最优。其原因主要在于:GPS卫星可见数较少,大多数情况下其卫星数在5颗左右,且信号经常出现失锁现象;BDS卫星数一般在7颗以上,卫星信号中断次数较少;BDS/GPS组合时卫星数在15颗以上,在进行定位时可选的卫星数大大增多,定位的稳定性与可靠性也大大增加。
2.2 静态开阔区实验数据分析
开阔区数据处理结果如图5所示。

图5 开阔区实验结果
选取GPS定位结果作为精度统计参考值,不同卫星系统定位精度统计见表3所列。

表3 开阔区不同卫星系统定位RMS误差分析 cm
(1) GPS定位N、E、U方向RMS在0.50 cm以内;BDS定位N方向RMS为10.87 cm,E方向RMS为5.28 cm,U方向RMS为13.82 cm;BDS/GPS联合定位N、E方向RMS在2.00 cm以内,U方向RMS为4.58 cm。
(2) BDS定位结果稳定性、可靠性与GPS相比较差,其可能原因为:BDS的GEO卫星轨道误差较大,对定位结果有一定影响;GNSS接收机所接收的BDS数据质量较差,含粗差、周跳太多。
(3) 由于BDS定位稳定性较差,在组合定位时相应定位结果稳定性也受到较大影响,静态GPS-RTK定位精度优于BDS/GPS组合RTK定位精度,更优于BDS-RTK定位结果精度。
2.3 动态实验数据分析
动态实验定位结果如图6所示,由于动态实验中经常出现定位中断的现象,在实验精度分析过程中,很难选取参考值进行精度评定,只能定性描述单系统定位与组合定位可靠性与稳定性。

图6 动态实验定位结果
(1) 完全遮挡区BDS、GPS单系统都无法继续进行导航定位服务,BDS/GPS组合仍可实现良好的定位服务,如图6中a、b区域。
(2) 半遮挡c区域,GPS虽然都可以进行定位,但是从点的离散程度来看其稳定性与可靠性较差;BDS/GPS组合定位稳定性和可靠性与GPS单系统定位相比较好,但结果可靠性仍不理想。
(3) 半遮挡d区域,GPS在部分区域可提供稳定的定位服务,而BDS则无法定位,其可能的原因在于受遮挡方位的影响,可视卫星数较少。
3 结 论
本文对不同状态下BDS/GPS组合RTK定位精度进行分析,静态实验结果表明,开阔区GPS定位精度优于BDS、BDS/GPS定位结果,封闭区BDS/GPS定位精度优于BDS、GPS定位结果;动态实验结果表明,在信号遮挡较短区域BDS/GPS组合定位仍可提供连续稳定的定位服务,但当观测环境恶劣时其定位可靠性仍受到较大影响。
受实验的条件限制,本文仅简单分析了BDS/GPS组合RTK定位性能,所得结论仍需做进一步严谨的验证,例如开阔区实验可考虑不同接收机、不同地理位置对定位精度的影响,封闭区实验可考虑不同方位遮挡对定位精度的影响。
[1] 焦文海,丁群,李建文,等.GNSS开放服务的监测评估[J].中国科学:物理学 力学 天文学,2011,41(5):521-527.
[2] ODOLINSKI R,TEUNISSEN P J G,ODIJK D.Combined GPS+BDS for short to long baseline RTK positioning[J].Measurement Science and Technology,2015,26(4):045801-1-045801-16.
[3] 楼益栋,龚晓鹏,辜声峰,等.GPS/BDS混合双差分RTK定位方法及结果分析[J].大地测量与地球动力学,2016,36(1):1-5.
[4] 王世进,秘金钟,李得海,等.GPS/BDS的RTK定位算法研究[J].武汉大学学报(信息科学版),2014,39(5):621-625.
[5] ODOLINSKI R,TEUNISSEN P J G,ODIJK D.Combined BDS,Galileo,QZSS and GPS single-frequency RTK[J].GPS Solutions,2014,19(1):151-163.
[6] ZHAO Sihao,CUI Xiaowei,GUAN Feng,et al.A Kalman filter-based short baseline RTK algorithm for single-frequency combination of GPS and BDS[J].Sensors,2014,14(8):15415-15433.
[7] 李征航.GPS测量与数据处理[M].武汉:武汉大学出版社,2010:58-113.
[8] 高晓,戴吾蛟,潘林.抗差EKF算法及其在GPS/BDS动态相对定位中的应用[J].大地测量与地球动力学,2014,34(4):140-144.
[9] 杨元喜,何海波,徐天河.论动态自适应滤波[J].测绘学报,2001,30(4):293-298.
[10] MOHAMED A H,SCHWARZ K P.Adaptive Kalman filtering for INS/GPS[J].Journal of Geodesy,1999,73(4):193-203.
[11] 杨元喜.自适应动态导航定位[M].北京:测绘出版社,2006:230-291.
[12] CHEN Kangkang,XU Tianhe,CHEN Guo,et al.The orbit and clock combination of iGMAS analysis centers and the analysis of their precision[C]//China Satellite Navigation Conference (CSNC) 2015 Proceedings: Volume Ⅱ,Lecture Notes in Electrical Engineering.Berlin:Springer,2015:421-438.
(责任编辑 张淑艳)
Performance assessment of BDS/GPS integrated RTK positioning based on products of iGMAS
ZHANG Mingbin1, WANG Qianxin1, LI Jiaojiao1,2
(1.School of Environment Science and Spatial Informatics, China University of Mining and Technology, Xuzhou 221116, China; 2.Bureau of Land and Resources of Xuzhou, Xuzhou 221000, China)
With the rapid development of the autonomous navigation system in many countries, multi-band multi-mode Global Navigation Satellite System(GNSS) integrated positioning has become the current research hotspot, which can overcome the limitations that the navigation based on single satellite system would not be continuous and reliable while GNSS signal is sheltered seriously. In this paper, the performance about BeiDou Navigation Satellite System/Global Positioning System(BDS/GPS) integrated Real-Time Kinematic(RTK) positioning with the application of products of international GNSS Monitoring & Assessment Service(iGMAS) is studied. The results of static experiment show that for the open area, the accuracy of GPS-RTK positioning is better than that of BDS, BDS/GPS integrated RTK positioning, and for the closed area, the performance of BDS/GPS integrated positioning is better than that of single positioning system, and the BDS positioning results are better than GPS results. The results of kinematic experiment show that in the serious signal blocking area, BDS/GPS can provide sustainable positioning services, but the services will be less reliable.
international GNSS Monitoring & Assessment Service(iGMAS); Kalman filtering; Real-Time Kinematic(RTK)
2016-07-04;
2016-09-12
国家自然科学基金资助项目(41574013);国家科技基础工作专项资助项目(2015FY310200);中央高校基本科研业务费专项资金资助项目(41504032) 和地理信息国家重点实验室基金资助项目(SKLGIE2014-Z-1-1)
张铭彬(1991-),男,安徽六安人,中国矿业大学硕士生; 王潜心(1980-),男,湖南常德人,博士,中国矿业大学副教授,硕士生导师.
10.3969/j.issn.1003-5060.2017.03.008
P228.43
A
1003-5060(2017)03-0327-06
猜你喜欢
农业资源与环境学报(2022年3期)2022-05-26
云南画报(2021年8期)2021-11-13
北京航空航天大学学报(2021年6期)2021-07-20
智富时代(2019年4期)2019-06-01
智富时代(2019年4期)2019-06-01
制造技术与机床(2018年10期)2018-10-13
雷达学报(2017年1期)2017-05-17
专用汽车(2015年1期)2015-03-01
航天返回与遥感(2014年5期)2014-07-31
中国矿业大学学报(社会科学版)(2014年2期)2014-07-12
