巡检机器人在无人值守变电站的应用探究
2017-04-18 03:38国网阜阳供电公司王绍亚
电子世界 2017年1期
国网阜阳供电公司 彭 林 王绍亚
巡检机器人在无人值守变电站的应用探究
国网阜阳供电公司 彭 林 王绍亚
随着社会经济的快速发展,科学技术水平的不断提高,再加上国家对电网发展的大力支持,电力系统自动化程度也不断提升,变电站巡检由原先的人工巡检逐渐向无人巡检方向转变。基于此,本文将对无人值守变电站巡检机器人的应用进行分析,希望能够对今后的有关研究提供一定的借鉴意义。
巡检机器人;无人值守;变电站
变电站电力设备巡检工作是值班人员每天必须进行的任务,但是实施起来工作量大,工作人员的技术水平也参差不齐,在加上部分值班缺乏责任心,导致变电站的日常巡检维护工作得不到有效保证,很容易出现设备异常,如果处理不及时,将会带来严重的损失。为了确保变电站设备的安全平稳运行,无人值守变电站逐渐出现,并且山西作为第一个智能巡检机器人应用试点,取得了很好的检测效果,但同样也存在不足之处。因此,对无人值守变电站机器人巡检应用进行探讨。
1.无人值守变电站巡检机器人的功能及其运行方式
机器人应用在无人值守变电站能够实现对站内一次设备进行红外测温和表计巡视。虽然机器人不能够自主对设备外观是否损坏、设备是否遭受污染等异常情况进行判断,但是机器人在巡检过程中可以将观测到的数据及结果上传到客户端,工作人员收到数据信息之后再进行判断[1]。以安徽阜阳500KV变电站机器人的运行方式为例,巡检机器人每天白天对设备进行以此巡检,主要巡检的内容有断路器SF6避雷器的动作次数和泄漏电流、电流互感器油位计、断路器和隔离开关的分合指示以及主变温度计和油位表等设备。晚间工作的时候则对设备进行红外线测温。根据变电站内的不同电压等级将巡检区域分为多个部分,并在几天之内进行一次完整的全面巡视和红外测温[2]。但是在实际巡查过程中,如果有需要则可以对巡检次数进行适当调整,加强重点设备的巡视和红外测温的次数。
2.无人值守变电站巡检机器人工作方式的改进及管理
科学技术水平的进步使得越来越多的无人值守变电站投入运行,这也在很大程度上加大了对机器人的需求。无人值守变电站在使用机器人的过程中,需要从场地的基础设施建设,机器人现场运行调试在到机器人的稳定运行,无论哪一个环节都需要严格把关。而要想实现对各个环节的严格把控,就必须建立起科学高效的管理方法和体系。
2.1 设立机器人管理岗位,负责机器人的日常维护工作
机器人管理员必须维护好机器人的日常运行,制定好科学合理的巡检计划表,安排好机器人的巡检工作,统计和分析机器人的巡视结果,对整理出来数据结果进行归档,及时复核机器人发现的异常情况。此外,机器人管理员还应当定期对机器人进行全身检查,及时发现机器人的隐患,对机器人存在的故障或者问题及时处理,确保机器人工作的正常。
2.2 建立机器人运行周报和月报制度
机器人管理员必须定期对变电站机器人巡检系统的运行情况进行总结,并且统计和分析变电站机器人巡检结果,密切关注机器人的运行状况、每周的工作情况、运行过程中出现的问题以及机器人巡检时发现的设备异常情况,然后每周将这些情况报告给机器人技术攻关人员。同时,机器人管理员还要总结本月自身的工作情况和机器人的运行情况,并制定下一阶段的工作计划,技术攻关小组的工作人员应当对机器人管理员汇报的工作情况及时进行整理,指出机器人管理员工作过程中存在的问题,并指导机器人管理员工作的改进,布置应该注意的重点工作。
2.3 组织好机器人的培训工作,学习维护机器人
机器人管理人员需要积极学习机器人的管理知识,不但要向厂家积极学习机器人的业务技能,还应当熟悉公关组下发的管理制度,同时还要担负起站内运维人员的培训工作[3]。作为一名机器人管理员必须精通机器人的基本操作,熟悉机器人的各项功能使用,还要对基本的使用规范和注意事项进行详细了解。当然,机器人管理人员还应当对机器人所巡检的设备项目了解充分,并对检查出的故障特征及日常维护方法要有充分掌握。
2.4 同厂家密切联系,共同对巡检机器人进行维护
机器人厂家应当提供充分的技术资料,并且定期组织技术培训,使得无人变电站机器人管理员能够掌握基本的运维技能,机器人如果在运行的过程中出现了任何突发状况也要及时向厂家反映,并与厂家共同解决机器人运行过程中出现的问题。此外,厂家还需要及时对机器人管理人员反映的问题给予及时的答复,对机器人的相关软件进行升级和创新,提高机器人的产品质量。
3.机器人自身功能应当不断改进和加强
除了上文提到的加强对机器人的管理维护之外,还应当考虑机器人自身的功能状况,厂家根据机器人实际运行过程中出现的问题不断分析和改进,从而提升机器人的功能,扩大机器人的应用方范围。
3.1 改进对满油位的识别
现阶段,机器人在对油位加以识别的时候一般是以油面来区分有油和无油,从而运算出油位的百分比。就主变瓦斯继电器集气盒,如果运行正常,那么集气盒中不会出现气体,变压器油满存与集气盒中,这个时候机器人对于油位的识别应当为100%,如果低于100%,那么就说明不正常,如图1所示。
3.2 针对表计指针微笑变化的识别
技术人员在对表计建模的时候,若表计指针没有出现变化或者出现的变化很小,则很有可能造成建模不准确的情况出现,最终则会使得机器人面对发生改变较大的真实指针时无法识别[4]。比如,某断路器SF6压力一直保持在0.6MPa,如果压力突然下降到0.5MPa,机器人将识别不出发生的变化,导致识别不了异常状况。
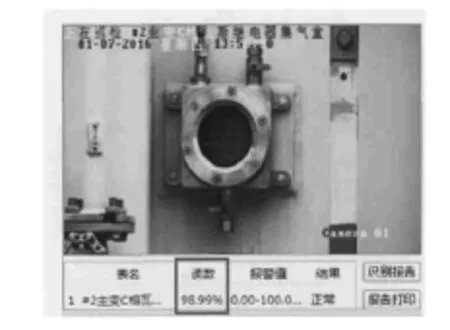
图1 机器人识别瓦斯集气盒的结果(机器人识别结果为98.99%,实际为100%)
3.3 增加复位功能,使机器人能够自动复位简单故障
机器人在运行过程中,如果遇到简单的故障自身不会处理的话,如果管理人员没有及时发现,机器人将会长时间停在固定位置,随着时间的推移,机器人的电量将会消耗殆尽,最终只能有管理人员推回充电房,这样不但增加了管理人员的工作负担,还降低了电池的使用寿命。如果增加了复位设置的话,机器人自身可以自动复位来解除故障。
3.4 提高机器人的智能水平
现阶段,无人值守变电站使用机器人巡检其功能主要表现在表计、设备的外观巡视以及红外测温两个部分,在分析主变压器噪声这一块不具备很强的共能。所以,如果机器人能在这一方面的功能有所提高,那么机器人的巡检工作质量将会更高。
4.结语
总而言之,机器人在无人值守变电站的使用越来越频繁,随着电网规模的不断扩大,机器人的应用范围将会更加广泛。因此,提高对机器人的管理,改进机器人的功能将会使得机器人巡检工作发挥更大的作用,从而使得运维人员能够将更多的精力消耗在运维一体化业务中去。
[1]魏鹏,张志强,张春熹,等.无人值守变电站巡检机器人导航系统研究[J].自动化与仪表,2014,12(07):5-8.
[2]刘越凡,叶海彬,刘凯.巡检机器人在500kV无人值守变电站的应用研究[J].供用电,2016,24(09):69-72.
[3]胡启明,胡润滋,周平.变电站巡检机器人应用技术[J].华中电力,2015,12(05):36-39.
[4]唐茂林,董沆,马向泽.基于导航识别和红外成像的变电站机器人巡检[J].宁夏电力,2013,17(060:19-22.
猜你喜欢
儿童时代·快乐苗苗(2022年2期)2022-04-19
少先队活动(2020年8期)2020-12-18
少先队活动(2020年7期)2020-12-18
故事作文·高年级(2020年2期)2020-02-24
电子技术与软件工程(2019年17期)2019-10-09
当代水产(2018年12期)2018-05-16
汽车维修技师(2016年1期)2016-08-12
太空探索(2016年12期)2016-07-18
上海商业(2016年22期)2016-06-01
中国化肥信息(2016年28期)2016-05-17