服务机器人移动平台的设计
2017-04-18 03:38重庆市第一中学校李双岑
电子世界 2017年1期
重庆市第一中学校 李双岑
服务机器人移动平台的设计
重庆市第一中学校 李双岑
针对服务机器人的工作环境,以功能和可靠性为设计目标,对服务机器人移动平台进行了设计。在结构设计方面,设计了带有悬挂装置的从动轮,提高了移动平台的稳定性;在传感器布置方面,采用多种传感器组合成传感器网络,增加了移动平台的智能性;最后建立了移动平台的动力学模型,并对设计方案进行了可行性分析。
移动平台;结构设计;传感器网络;可行性分析
《中国制造2025》中强调将机器人作为未来重点发展的领域之一,提出要围绕工业机器人和服务机器人两大方向,积极研发新的产品,扩大机器人的应用市场。最近五年,服务机器人一直呈现出一种快速增长的趋势。国际机器人联合会给出的数据显示:2013年,家用/个人服务机器人和专业服务机器人的全球销量分别为400万台和2.1万台,同比增长28%和4%。未来几年,随着机器人技术获得重大突破,机器人生产和维护成本大幅降低,服务机器人的发展将继续快速增长[1]。
本文介绍了该移动平台的机械结构设计,并建立了移动平台的动力学模型,结合相关软件对移动平台进行了可行性分析[2-4]。
1.机器人移动平台功能要求
本服务机器人移动平台主要用于室内导游或会场迎宾,根据其实际的使用场所确定了其相关运动参数和功能。运动参数要求:正常行驶速度0.5m/s,最大行驶速度1m/s;最大加速度0.5m/s2;最小转弯半径0m;最大爬坡度10°;最大越障能力10mm,最小离地间隙20mm;最大承载能力50kg。机器人移动平台运动功能要求:能够在特定的环境下实现寻迹功能、目标识别功能和避障功能。
2.机器人移动平台结构设计
在服务机器人中,轮式移动平台具有比腿式机器人运动更快、更平稳,控制更简单等优点;比履带式机器人结构简单、噪音小和振动小等优点。此外,轮式移动平台具有更好的活动能力、效率高、便于拆装和维护。根据本服务机器人移动平台的应用场所和功能要求,轮式移动平台是最佳选择。机器人移动平台的设计主要包括车轮方案、驱动电机、减速器、传感器的确立;主、从动轮以及悬挂装置的设计;移动平台总体设计和可行性分析。

图1 移动平台车轮配置
2.1 移动平台轮系配置
机器人轮式移动平台常见的车轮配置有三轮配置和四轮配置。一般迎宾机器人的高宽比较大,机器人在行驶过程中容易摔倒,由于三轮配置的稳定性不如四轮配置,初步选定四轮配置的方案。考虑到移动平台最小转弯半径为0m的要求,移动平台车轮的布局如图1所示:四个车轮呈十字型布置,中间是两个对称且同轴的独立驱动轮,前后端各一个万向从动轮。移动平台尺寸参数:驱动轮距,从动轮距;驱动轮直径,轮宽,滑动摩擦系数,滚动摩擦系数;从动轮直径,轮宽,滑动摩擦系数,滚动摩擦系数。
2.2 驱动电机及减速器的确立
2.2.1 驱动电机功率计算
当移动平台在坡道上行驶时需要克服:地面的滚动阻力Ff、空气作用在移动平台行驶方向上的空气阻力Fw、重力沿坡道的分力即坡度阻力Fi以及加速阻力Fj。由于移动平台是匀速行驶且速度极慢,故加速助力和空气阻力均为零,其受力如图2所示。所以移动平台在坡道上的总驱动力为:。假设移动平台的重力均匀分布在四个车轮上,①当坡度、移动速度时,滚动阻力;坡度阻力。根据以上三个式子可以得到:移动平台在坡道上匀速行驶时的牵引力,每个电机所需要提供的功率。②当移动平台以最大加速度0.5m/s在平路上行驶时,驱动力。其中滚动阻力;加速阻力。以此可以得出移动平台在平路上以最大加速度行驶时的牵引力,每个电机所需要提供的功率。
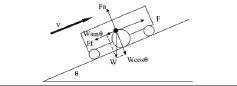
图2 移动平台坡道受力图
2.2.2 驱动电机力矩计算
通过上面的分析可以得出:平均功率输出最大一般出现在爬坡工况中。下面将对移动平台的转向和越障工况中的力矩进行计算。
(1)转向工况下力矩计算移动平台在水平路面上转向行驶时,机器人质心与驱动的距离,质心与万向轮的距离;驱动轮作纯滚动运动,其受到滚动阻力和垂直于轮面方向的静摩擦力的作用;每个车轮所受的滚动阻力。如图3(a)和(b)所示,左轮和右轮的驱动力分别表示为FL和Fr,R表示转弯半径,由此可以得到移动平台力和力矩的平衡方程为:

用相关软件可以绘出左右轮驱动力随转弯半径变化的关系曲线,如图4所示。通过以上分析,时所需驱动力最大,最大驱动力约为10N,驱动力矩:


图3 移动平台转弯工况受力图
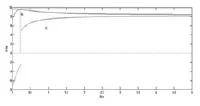
图4 驱动力变化曲线图

(2)越障工况下力矩计算移动平台在通过障碍物的受力如图5所示,假设台阶高度为t,驱动轮驱动力矩为T2。其中:
驱动轮作用在从动轮上的力:

平台在翻越障碍物的过程中,F1必须满足:

用相关软件可以绘出驱动轮驱动力矩T2随障碍物高度t变化的关系曲线,如图6所示。通过以上分析,当时,驱动力矩。

图5 移动平台越障是受力图
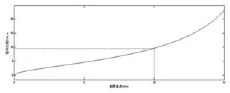
图6 驱动力矩随障碍物高度变化图
2.3 悬挂装置的设计
移动平台在行驶过程中有可能出现某一个轮子悬空的现象,这必然会影响到机器人的稳定性。为了防止上述现象的发生就必须使车轮能够上下自动调整,由于驱动轮需要和减速器、电机等连接,为了简化移动平台结构,所以将悬挂装置设计在从动轮上。设计的悬挂装置机构图如图7所示,其自由度。悬挂装置弹簧刚度系数和可压缩量的选取直接关系到悬挂效果的好坏。下面对弹簧刚度系数的选取进行计算。
(1)移动平台在水平路面上的受力分析
水平路面上移动平台机构简化模型如图8所示,其中M表示机器人自身重量,NL、NR分别表示左右驱动轮所受的支持力,NF、ND分别表示前后从动轮所受的支持力,弹簧刚度K、初始变形量为X0。由力的平衡关系有:
(2)移动平台在凹坑路面上的受力分析
凹坑路面移动平台机构简化模型如图9所示,由力的平衡关系有:


假设从动轮相对于参考平衡点的压缩行程为Ve1,伸展行程为Ve2。为了满足最小法向支持要求弹簧刚度应满足:

2.4 移动平台总体设计
移动平台用于支撑机器人本体,安装各种传感器及元器件,具有非常重要的作用。根据车轮的布置和尺寸要求。整体框架由方形钢管焊接而成,钢管与上面的平板连接。
传感器是机器人感知外部环境的器官。根据移动平台的使用场所,采用反射式的红外传感器安装在移动平台的前后方,实现寻迹功能;采用热释电传感器安装在移动平台的前后方,实现对生命体的检测;采用超声波传感器安装在移动平台的四周,实现避障功能。
3.机器人移动平台可行性分析
在对移动平台进行制造之前,需要对移动平台的可行性进行分析,以此来判断设计的移动平台是否达到设计要求。虚拟样机技术能够对设计的产品进行仿真分析,并以此判断产品的可行性。本文对移动平台的越障工况和爬坡工况进行仿真分析,以此作为判断移动平台可行性的参考标准。
3.1 越障工况仿真分析
根据设计要求,将障碍物设为10mm高的台阶型障碍,仿真结果如图13所示。从图中可以看到移动平台由静止启动到成功越过台阶的整个过程中,驱动力绝大部分是小于3200N.mm,峰值力矩也远小于9600N.mm。在1.5-3秒区间内驱动力矩出现几个峰值,分别对应前轮、驱动轮和后轮越障的瞬间,在此瞬间驱动力明显增大,这说明仿真结果符合实际情况。
3.2 爬坡工况仿真分析
根据设计要求,对移动平台的爬坡工况进行仿真分析,仿真结果如图14所示。由图可知,驱动力绝大部分是小于3200N. mm,只有在移动平台前轮和后轮接触坡道的瞬间驱动力矩产生了明显的增加,此时驱动力矩增至堵转力矩大小。
通过上面的分析可以得出:本研究所选择的电机和减速器是合理的,设计的移动平台是可行的。
4.结论
本研究根据服务机器人的应用场所,设计了一款具有寻迹,目标识别和避障功能的通用型移动平台。该移动平台能够满足最小转弯半径、正常行驶速度和最大爬坡度等要求。
[1]工信部装备工业司.《中国制造2025》推动机器人发展[J].机器人技术与应用,2015(3):31-33.
[2]陈军,陈振华,李素平,等.迎宾机器人轮式移动工作台的设计与控制方法研究[J].机械制造,2009,47(11):24-26.
[3]许松清,吴海彬,杨兴裕.两轮驱动移动机器人的运动学研究[J].电子机械工程,2005,21(6):31-34.
猜你喜欢
汽车实用技术(2022年5期)2022-04-02
汽车实用技术(2022年5期)2022-04-02
装备机械(2020年3期)2020-09-29
中国新技术新产品(2020年4期)2020-05-05
机械管理开发(2020年1期)2020-03-14
中国外汇(2019年9期)2019-07-13
家庭影院技术(2018年9期)2018-11-02
现代企业文化(2018年13期)2018-06-09
家庭影院技术(2018年3期)2018-05-09
科技创新导报(2016年27期)2017-03-14