基于故障树分析的某雷达自动调平系统故障研究
2017-04-18 03:38中国电子科技集团公司第三十八研究所苟军喜
电子世界 2017年1期
中国电子科技集团公司第三十八研究所 苟军喜
基于故障树分析的某雷达自动调平系统故障研究
中国电子科技集团公司第三十八研究所 苟军喜
本文从雷达自动调平技术基础出发,详细研究了自动调平的运行原理和控制机理,对其故障产生的根源进行了深入的探究。通过收集故障信息和故障产生的机理,并对其进行了深入的分析,建立了自动调平系统的故障模型,并以自动调平系统失效为顶事件,层层分析展开,设计了详实完整的故障树,故障树的底事件数量达到了50个以上,基本涵盖了机械结构、伺服驱动、电气控制和软件逻辑等各个方面的故障信息,并对故障树进行了定性和定量分析,求解了其最小割集,对底事件重要度进行了分析。
自动架设;故障诊断;故障树分析
1.引言
自动架设技术是实现雷达高机动性的关键技术之一,一旦出现故障,会直接导致雷达装备的战斗力丧失,如何提高自动架设系统的可靠性,是现役雷达装备研制单位迫切需要研究的方向。某雷达自动调平系统主要由操作控制系统、执行机构和检测系统三大部分组成。采用四点调平的理论,通过四条撑腿机构实现平台的自动调平。由于系统属于户外使用型,所以将操作控制系统集中设计在一个户外密封箱内,以下称为驱动调平控制箱。
2.故障树的建立
2.1 故障模式识别
对自动调平系统进行故障树分析的目的是找到导致系统无法自动调平,或者自动调平后无法进行后续动作的故障原因,并采取相应的维修或补救措施,使装备恢复战斗力。而自动调平系统的故障种类既有硬件故障又有软件故障,在故障树分析中需要综合考虑。为了故障树建树的简洁化和实用化,在建立此故障树过程中提出以下几个前提条件:
假设1:系统已经经过调试试验合格并正确执行过所有的动作,即系统设备的参数和软件参数设置合适;
假设2:雷达操作手都是经过训练并能够按照操作使用要求对雷达进行正确的操作;
假设3:被分析的雷达设备没有经历过由外力损坏造成的安全事故,也就是故障树分析只针对故障而不包含事故;
假设4:一些统一封装的模块,如PLC模块、电源模块、水平传感器、电机、驱动器等的故障不进一步分解,即定义为底事件。
本自动调平系统的状态有两个:能够实现自动调平和无法满足自动调平的需要,将自动调平系统失效定义为系统不希望事件,即顶事件。故障分析的目的是找到影响自动调平的所有故障原因事件。由于雷达自动调平系统比较复杂,对其故障原因进行分类显得额外重要,也是故障树建树的关键。所以,结合实际的故障诊断实例,结合故障的表现形式,将自动调平系统失效归纳为四个故障现象,分别为四撑腿均无动作且系统未调平、个别撑腿动作异常或无动作且系统未调平、四撑腿可以正常动作但系统无法调平和系统能够自动调平但有异常。通过直观的现象,顺利对故障进行演绎发展。同时,针对四撑腿可以正常动作但系统无法调平的故障事件,细分为四个底事件:分别为水平传感器故障(A)、阵地落差过大(B)、A/D模块损坏(C)和程序溢出(D)。
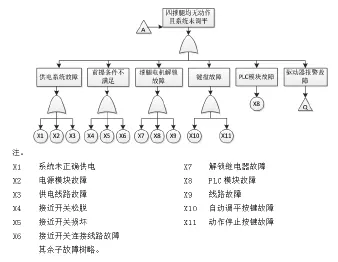
图1 模块A故障树
2.2 子故障树A
从子树A的顶部事件进行分析,结合实际故障排除和产品的技术资料,四条撑腿均无动作的故障原因首先考虑供电系统是否正常,其次再考虑自动调平的前提条件是否满足,这两条中间事件也是故障的常发部位,尤其是前提条件不满足,即PLC控制程序的开启条件,而自动调平的前提条件为支腿展开到位,而支腿展开到位主要通过接近开关进行检测,然后给PLC一个是否到位的高电平信号,由此再发展为三个底事件:接近开关松脱或故障,以及线路故障。其次,结合伺服电机驱动器的自诊断功能,也就是错误报警代码,进一步发掘故障的直接原因,由于驱动器的报警故障代码及其意义相同,所以将其发展为一个通用的子故障树Q并进一步分析解释,子故障树Q可参阅驱动器厂家提供的故障代码表。而驱动电机动作的条件是必须对其进行解锁,解锁信号又由PLC发出,经过电磁继电器,统一分配给四条撑腿,从其信号流可以看出,此处四条撑腿解锁失效,必然是在撑腿连接器之前的线路和器件故障,从而找到此电机解锁故障的三个底事件:继电器故障、PLC模块故障或者线路故障,而这三个底事件由逻辑或门连接。其他两个事件,包括键盘故障和PLC模块故障,在实际使用过程中也发生过,由于PLC模块只能返厂维修,所以此处将其定位底事件,键盘故障发生较少,进一步分解主要由两个底事件自动调平按键故障或动作停止按键故障构成。子树A(四撑腿均无动作且系统未调平)的故障树如图1所示。
3.故障树分析
3.1 故障树的定性分析
采用上行法对雷达自动调平系统故障树进行定性分析,找出其最小割集的所有组合。
先求四个子模块的最小割集:
A=X1+X2+X3+X4+X5+X6+X7+X8+X9+X10+X11+Q
B=X15+X16+X17+X18+X23+X16+X25+X15+X26+X27+Q +X51·(X19+X20+X21+X22)
B=X15+X16+X17+X18+X23+X25+X26+X27+X19X51 +X20X51+X21X51+X22X51+Q
C=X30+X31+X32+X33+X34+X35+X36+X37+X34+X35+X38+X39+Q
Q=X40+X41+X42+X43+X44+X45+X46+X47+X48+X49+X5 0+X51+X52+X53+X54+X55+X56
自动调平系统故障的最小割集为:
T=A+B+X35+X15+X12+X13+C
T=X1+X2+X3+X4+X5+X6+X7+X8+X9+X10+X11+Q+X15+X16+X1 7+X18+X23+X25+X26+X27+X19X51+X20X51+X21X51+X22X51+Q+X3 0+X31+X32+X33+X34+X35+X36+X37+X34+X35+X38+X39+Q
T=X1+X2+X3+X4+X5+X6+X7+X8+X9+X10+X11+X15+X16+X17+ X18+X23+X25+X26+X27+X30+X31+X32+X33+X34+X35+X36+X37+X38 +X39+X40+X41+X42+X43+X44+X45+X46+X47+X48+X49+X50+X51+X 52+X53+X54+X55+X56+X19X51+X20X51+X21X51+X22X51
3.2 故障树的定量分析
3.2.1 故障树的故障概率函数
可以看出,我们建造的故障树,只含有故障事件、逻辑与门和逻辑或门,所以调平系统失效的故障树为单调故障树。所以可以对其进行定量分析方法计算其顶事件发生概率。而通过定性分析可知,其最小割集数量为r=50,可以看出,若想采用采用容斥定理展开后对所得多项式进行计算,多项式的数目为2r-1=1125899906842623。计算量非常大,难以采用容斥定理计算其精确解,同时,各个底事件的数据本身就不准确,采用精确计算没有必要。当必须得到精确解时,也可以采用不交话算法。
通过定性分析可知,各个最小割集众相同的底事件较少且其发生概率较低,可以假设各个最小割集之间互相独立,各个最小割集发生(或不发生)互不相关。所以以下采用独立近似算法,对自动调平系统故障的发生概率Q进行简单的近似计算。
独立近似算法:当所有最小割集都不发生即顶事件不发生,根据概率论乘法定理,下式成立:
其中,Q为顶事件发生的概率,Ki为第I个最小割集Ci的所有底事件的交,P(Ki)为最小割集Ci的所有底事件发生概率的积。
计算顶事件发生的概率:

故障树中的底事件并非同等重要的。若能对故障树中每个底事件的重要性程度给予定量的描述,对系统设计和故障分析都是很有价值的。几个常用的底事件的重要度如下:
3.2.2 底事件的概率重要度
假设故障树的所有底事件互相独立,则第i个底事件的概率重要度为:

当故障树只有与门和或门构成时,顶事件发生的概率可以表示为第i个底事件发生时顶事件发生的概率乘以底事件发生的概率,减去第i个底事件不发生时顶事件发生的概率乘以底事件不发生的概率,所以上式可以简化为:

第i个底事件的概率重要度的含义:表示第i个底事件发生概率的微小变化而引起的顶事件发生概率的变化率。也就是第i个底事件发生时顶事件发生的概率减去第i个底事件不发生时顶事件发生的概率。概率重要度大的底事件,当其发生的概率稍有变化,会引起顶事件发生概率的显著变化,可见这种底事件就很重要。
3.2.3 底事件的结构重要度
在不考虑底事件发生概率值的情况下,通过故障树的结构关系,确定某个底事件的相对位置的重要性。定义第I个底事件的结构重要度为:

底事件的结构重要度的含义:底事件i发生时顶事件发生的状态数减去底事件i不发生时顶事件发生的状态数,对所有底事件组合求和,然后除以剩余r-1个底事件的状态数。底事件的结构重要度从故障树结构的角度反映了各个底事件在故障树中的重要程度。
4.小结
本文对雷达自动调平系统的故障模式进行了详细的识别,辨识了故障树分析的边界条件,以自动调平系统失效为顶事件,基于故障诊断的便捷性和直观性,分解为“四撑腿均无动作且系统未调平”、“个别撑腿动作异常或无动作且系统未调平”、“四撑腿可以正常动作但系统无法调平”和“系统能够自动调平但有异常”,共四个中间事件,然后层层展开,建立了四个子故障树。最后对故障树进行了定性和定量分析,确定了故障树的最小割集,为相关装备故障诊断与维修提供依据。
[1]翟羽健.重型载体多点位自动调平技术[J].中国机械工程, 2014,5(5).
[2]李忠于.某雷达自动调平机构的设计分析[J].火控雷达技术,2012,10(9).
[3]李鹏.西门子PLC与计算机之间的通讯程序设计[J].国外电子元器件,2014,8(8).
苟军喜(1983-),男,工程师,主要从事雷达总体结构设计。
猜你喜欢
中学生数理化·中考版(2022年6期)2022-06-05
中学生数理化·中考版(2021年6期)2021-11-22
新世纪智能(数学备考)(2021年4期)2021-08-06
新世纪智能(数学备考)(2021年4期)2021-08-06
中国民间疗法(2021年5期)2021-06-09
机械工程与自动化(2020年4期)2020-08-25
电子制作(2019年15期)2019-08-27
小学生学习指导(低年级)(2018年12期)2018-12-29
森林工程(2018年4期)2018-08-04
航天工业管理(2017年4期)2017-05-12