基于模糊控制的温度控制系统
2017-04-18 03:38蚌埠学院电子与电气工程学院史成芳
电子世界 2017年1期
蚌埠学院电子与电气工程学院 郭 紧 史成芳
基于模糊控制的温度控制系统
蚌埠学院电子与电气工程学院 郭 紧 史成芳
本文针对实际温度控制的滞后性和非线性特点,提出了模糊控制的算法,该算法可在未知系统数学模型的条件下,根据实测的温度与设定值之间的偏差,选择合适的控制方案,利用反馈,达到消除误差或者减小误差的目的,仿真分析表明该算法控制精度高,动态性能好。
模糊控制器;温度控制;控制算法
1 引言
温度控制在日常生活和工业生产中都有着广泛地应用。在实际应用中温度控制具有非线性、大滞后、时变性和大惯性的特点。国内外科研人员在对温度控制的研究中发现,根据经典的控制理论,要建立温度控制的精确的数学模型很困难,而且在解决温度控制的非线性、大滞后以及时变性等问题也存在极大困难,而模糊控制的提出能够有效的解决温度控制的问题。1965年Zadeh提出了模糊集合的概念,自此,模糊控制作为现代控制理论一个重要分支,发展日益成熟[1],并广泛应用于家用电器、儿童玩具、工业控制、航空航天和国防控制。与此同时,单片机技术也获得长足的发展,单片机技术是计算机技术应用于控制领域的一个分支,渗透于生活与生产过程的方方面面。在单片机上实现模糊控制,无需建立精确地数学模型,只要选取适当的控制算法,根据环境温度的变化,就能够将温度控制在理想的范围内,达到控制精度高、动态性能好的控制要求,具有比较高的理论研究价值和应用价值[2]。
2 温度控制系统
模糊温度控制系统的结构框图如图1所示,系统由单片机、温度传感器及显示模块等构成。
温度采集通常采用数字温度传感器DSB1820,该数字温度传感器的好处是采用一条传输线与单片机通信,同时由于该传感器输出量即为数字量,使得该系统不需要另外加A/D转换器,从而很大程度上简化了外围电路的设计,提高了该系统的性价比。单片机采用AT89C51,温度采集模块的硬件输出实现是P0口的0引脚。温度显示模块,采用数码管显示温度。风机驱动模块,采用了一块驱动芯片,ULN2003。温度由传感器采集,传送给模糊控制器,根据模糊控制器的控制算法计算出控制系统的控制输出量,经D/A转换后,转化为模拟量,驱动电磁阀的开度,从而确定风机的速度和加热阀的大小。以达把室温控制在最佳温度范围内的目标。

图1 系统框图

图2 模糊控制器结构图
3 模糊控制器的设计(见图2)
高精密电器元件对温度的范围变化的范围控制要求比较高,本文采用温度误差和温度误差的变化率作为输入变量,该二维模糊控制器的逻辑结构图如图2所示,
根据实际环境状况和传感器的的测量精度,为了将输入的温度误差信号进行模糊处理,将温度误差基本论域设定为[-2,+2],温度误差的基本论域设定为[-1,+1],把误差和误差变化量化为13个等级,即为:{-6,-5,-4,-3,-2,-1,0,+1,+2,+3,+4,+5,+6};输出变量H量化为15个等级,即为:{-7,-6,-5,-4,-3,-2,-1,0,+1,+2,+3,+4,+5,+6,+7}。由此可以计算出,该温度模糊控制器的误差量化因子ke=6/2=3,误差变化率的量化因子kec=6/1=6。量化因子可以使输入量从基本论域变换到模糊集论域上去,即在基本论域中给定任意一个数值通过计算都可以得到在模糊集论域中最相近的整数点。由模糊控制算法计算出的控制量是不能直接对控制对象进行控制的,需要将其转换到基本论域中去,方能为控制对象所接受[3]。
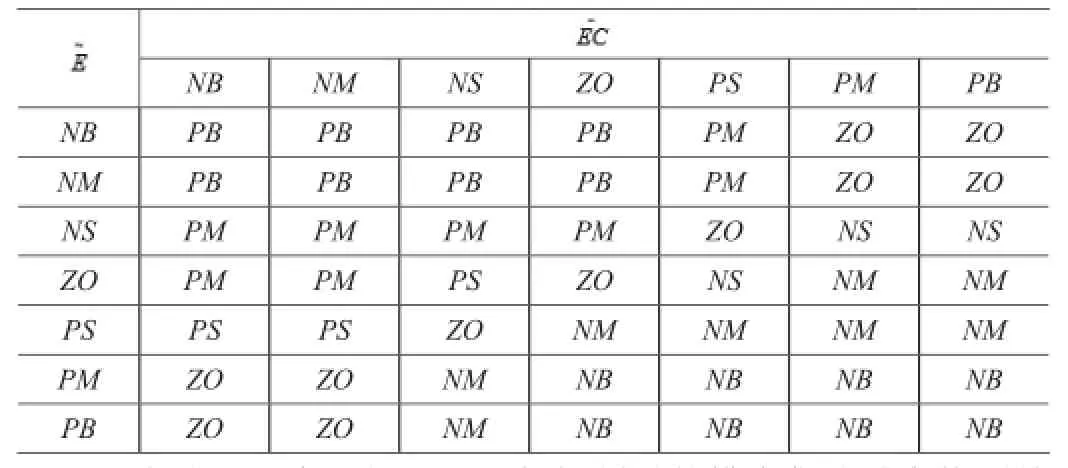
表1 温度模糊控制规则表
通常选取一个比例因子ku把控制量的模糊集论域变换到基本论域中。若控制量的基本论域为[xmin,xmax],量化后的论域为[ymin,ymax],则控制量的比例因子可由下式确定:

根据实际经验,系统采取如表1所示的模糊规则[4-9]。
由于模糊控制器的输出是一个模糊集合,无法对外围被控制对象实现控制,所以需要对他进行解模糊,求出一个最具有代表意义的精确的控制量实现控制,解模糊的方法有很多,比如最大隶属度法,加权平均法,还有中位数法,本文采用中位数法。
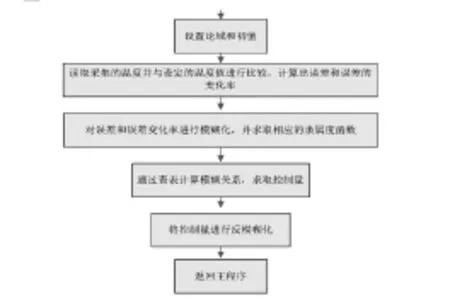
图3 模糊控制算法流程图
4 仿真分析
模糊控制算法是本系统的核心控制算法,它包括两个部分,一个是单片机离线计算模糊控制规则并将结果转换为一个表格存储起来供系统查表使用,此为模糊矩阵运算部分,另外一个是单片机读取采集的温度,并将采集到的温度值同单片机设定的温度值进行比较得到温度误差和误差的变化率,通过量化因子将它映射到模糊集论域上去,并进行模糊运算获得模糊控制量,再进行解模糊。
解模糊化后的控制输出,进行数模转化后,控制电磁阀的开度,从而控制风机和加热阀,达到修正温度的目的,流程图如图3所示。
利用Simulink对模糊控制算法进行仿真,结果如图4所示,从图中可以看出该算法无超调量,调节时间大约为5秒,稳态误差为零。

图4 仿真结果图
5 结语
本文通过对国内温度控制存在问题的研究,结合单片机技术,采用模糊控制算法实现了基于模糊控制的温度控制系统,系统使用了AT89C51单片机,成本比较低,通过MATLAB仿真试验证明,该算法的设计比较合理,能够将温度控制在设定的温度范围内,具有一定的工程实践价值。
[1]诸静.模糊控制原理与应用[M].北京:机械工业出版社,1995: 1-15.
[2]张曾科.模糊数学在自动化技术中的应用[M].北京:清华大学出版社,1997:130-189.
[3]张小娟.一种基于模糊控制的温度控制系统设计[J].仪表技术与传感器,2010(11): 76-78.
[4]郑艳玲,王占奎,张素君.模糊控制在智能温度控制系统中的应用[J].机械与电子,2011(27):101-102.
[5]南新元,陈志军,程志江.基于模糊PID的电锅炉温度控制系统研究[J].自动化仪表,2008:19-22
[6]鲁克,张晓东,俞盛凯.基于模糊控制算法的温度控制系统设计[J].机电产品开发与创新,2013(26):133-135.
[7]杨国强.基于模糊自适应控制的锅炉温度控制[J].液晶与显示,2013,4(31):52-55.
[8]翟震,史宏昆,等.温度控制系统模糊PID算法的仿真研究[J].电气科技创新与应用,2015(36):42-45.
[9]赵阳,曲兴华,等.基于模糊算法的自调整温度控制系统[J].天津大学学报,2011,1(44):73-78.
A Design of the Temperature Control System Based on Fuzzy Control
GUO Jin,SHI Cheng-Fang
(Department of electronic and electrical Engineering,Bengbu college)
In view of the skewing and non-linear properties of real-temperature controlling,this paper proposes a kind of fuzzy control algorithm.According to the deviation between the measuring and the real temperature,the algorithm select suitable system scheme and use feedback to achieve the purpose of eliminating or reducing deviation.The simulated results indicate that the fuzzy control algorithm has high precision and good dynamic performance.
fuzzy controller; temperature control; control algorithm
郭紧(1990—),女,电气工程及其自动化专业本科生。
史成芳(1976—),女,硕士,讲师,从事控制工程及电子技术应用研究。
安徽省省级大学生创新创业训练计划项目(201311305055);蚌埠学院科研项目(2015ZR13)。
猜你喜欢
舰船科学技术(2022年20期)2022-11-28
成都信息工程大学学报(2021年6期)2021-02-12
测控技术(2018年10期)2018-11-25
制造技术与机床(2017年6期)2018-01-19
制造技术与机床(2017年3期)2017-06-23
广东石油化工学院学报(2016年3期)2016-05-17
电子制作(2016年21期)2016-05-17
电源技术(2016年2期)2016-02-27
电源技术(2015年9期)2015-06-05
组合机床与自动化加工技术(2014年12期)2014-03-01