基于ARM微处理器的雷达有源校准器设计
2017-04-18 03:38中国电波传播研究所电波环境特性及模化技术重点实验室李善斌李慧明朱秀芹张玉石
电子世界 2017年1期
中国电波传播研究所电波环境特性及模化技术重点实验室 李善斌 李慧明 朱秀芹 张玉石
中国电波传播研究所电波环境特性及模化技术重点实验室 西安电子科技大学雷达信号处理国家重点实验室 黎 鑫
基于ARM微处理器的雷达有源校准器设计
中国电波传播研究所电波环境特性及模化技术重点实验室 李善斌 李慧明 朱秀芹 张玉石
中国电波传播研究所电波环境特性及模化技术重点实验室 西安电子科技大学雷达信号处理国家重点实验室 黎 鑫
针对传统雷达有源校准器存在功能单一、便携性差和集成度低等问题,研究并实现了一种基于ARM微处理器的雷达有源校准器。通过对ARM微处理器系统和嵌入式WinCE(Windows CE)操作系统等的综合运用开发,实现了雷达有源校准器系统控制、系统校时、数据采集、数据存储和数据显示等功能的本机集成。工程应用表明,该设备具有数据采集全面、便携性佳和集成度高等优点。
ARM微处理器;雷达有源校准器;WinCE
0 引言
在雷达杂波测量过程中,对雷达系统进行外部校准是保障后续杂波数据处理有效性的必要环节。雷达系统的外部校准通常是通过测量一个已知雷达散射截面积(RCS)的校准目标来实现的[1]。校准目标可以采用已知RCS的无源角反射器、有源校准器或均匀扩展地物(如热带雨林)等,但实际上校准场地背景杂波干扰严重,或者很难找到大面积的理想均匀地物,因此,采用安装方便、体积小且RCS可以设计较大的雷达有源校准器来实施雷达外校准是目前较好的选择[2]。
传统的雷达有源校准器以单片机为核心,主要实现系统的控制与数据采集,而系统校时、数据存储和数据显示则由手持式GPS接收机和笔记本电脑完成,因此,传统的雷达有源校准器的缺点是功能比较单一、设备多、便携性差、集成度低[1]。
近年来,嵌入式系统以其小型、专用和高可靠等特点,已经在医疗、工业控制和消费电子等领域得到了广泛的应用,ARM技术作为嵌入式系统方面的主流技术,其应用领域也越来越广泛[3],因此,研究一种基于ARM微处理器的雷达有源校准器,可以实现本机实时控制,实时数据采集、存储和显示等功能,具有良好的人机交互功能,并且具有便携性佳、数据采集全面和集成度高等优点。
1 系统硬件设计
系统由ARM微处理器系统、数据采集电路、GPS接收模块、接收天线、发射天线和微波组件及其控制电路等组成,如图1所示。

图1 系统硬件总体框架
ARM微处理器系统作为整个系统的控制中心,其主要任务是根据当前环境温度调度并控制微波组件使其按照预先设定的方式工作,并完成人机交互、实时数据显示和存储等功能;数据采集电路用于获取微波组件输出端的视频信号数据和温度传感器的温度数据,然后通过串口传送给ARM微处理器系统。GPS接收模块用于接收GPS信息,并将GPS信息通过串口传送给ARM微处理器系统。接收天线用于接收雷达的射频信号,发射天线用于将雷达有源校准器放大后的射频信号发射给雷达。微波组件及其控制电路通过串口接收ARM微处理器系统的指令,然后对微波组件进行调整,并在调整完成后通过串口反馈给ARM微处理器系统。
1.1 ARM微处理器系统
ARM微处理器系统采用基于ARM11系列处理器的嵌入式开发板。ARM11系列处理器是ARM公司近年推出的新一代RISC处理器,它是ARM新指令架构——ARMv6的第一代设计实现[4]。板上采用的处理器芯片为SAMSUNG 16/32位RISC微处理器S3C6410,它基于ARM1176JZF-S处理器核,最高运行频率为667MHz,采用SD卡的存储方式,最高可支持32GB SD卡存储。开发板具备4个串口、1个网口和1个USB等接口,可以满足系统对接口的需求。
雷达有源校准器采用该开发板不仅可以减少硬件设计和软件开发的难度,而且还可以用画图的方式实现数据的实时显示。
1.2 数据采集电路
数据采集电路的主要作用,一是将微波组件输出的模拟信号转换成数字信号,二是获取温度传感器的温度数据,然后把二者的数据通过串口传送给ARM微处理器系统,是雷达有源校准器不可或缺的组成部分。
数据采集电路由微处理器、信号调理电路、AD转换器、门限控制电路和通讯等部分组成,如图2所示。微处理器采用华邦W77E58单片机,其指令与MCS-51系列单片机兼容,但内核经过重新设计,提高了时钟速度和存储器访问周期速度。信号调理电路选用运算放大器MCP6002和电阻电容等实现视频信号的匹配、滤波和放大等功能。为满足数据采集需要,AD转换芯片采用MAX1290芯片,该芯片为12位采样ADC,采样速率为400ksps。门限控制电路选用LM211比较器芯片,为减小数据量,只对高于噪声电平(或已知信号电平)的信号予以采样。串口电平转换器采用MAX232芯片,便于数据采集电路与ARM微处理器系统进行通讯。
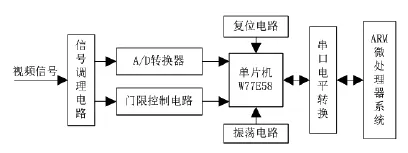
图2 数据采集电路组成框图
1.3 GPS接收模块
GPS信息(包括位置信息和时间信息等)是雷达系统外部校准和数据处理的重要参数,对数据处理和校准结果起着举足轻重的作用。传统雷达有源校准器采用GPS手持式接收机获取GPS信息,本系统采用本机集成GPS OEM接收板的方式自动获取并存储GPS信息,相比而言,提高了系统的集成度。
为满足雷达有源校准器对GSP信息的需求,本系统GPS接收模块选用摩托罗拉(Motorola)M12授时型GPS OEM接收板,其具有定位精度高(小于25m)、授时准确(高达ns级的同步授时)和功耗低等优点[5]。
1978年12月,党的十一届三中全会拉开了我国改革开放的序幕,同年十一月份,当时的国家物资总局组织有关部门和地方领导赴日本考察,首次将物流的概念引入国内。
1.4 微波组件及其控制电路
微波组件及其控制电路是雷达有源校准器最重要的组成部分,其能够在ARM微处理器系统的控制下实现射频信号的接收、放大、自校准和转发等功能,这也是雷达有源校准器要实现的功能。
微波组件由微波开关、滤波器、衰减器、功率放大器、信号源和检波器等组成,如图3所示。微波开关采用单刀双掷工作方式,实现输入/输出微波信号的切换;衰减器分为粗调和微调两种,粗调衰减器采用程控工作方式,用于实现衰减量的大步进调整,微调衰减器采用电调工作方式,用于实现衰减量的小步进调整,通过粗调和微调相结合的方式,实现衰减量的精确调整,从而实现增益的精确调整;信号源是系统自校准的基准信号,其产生两路信号,一路通过微波环路进入检波器,另一路直接进入检波器,然后交由数据采集电路和ARM微处理器系统进行后续处理。

图3 微波组件组成框图
微波组件控制电路(如图4所示)以单片机W77E58为核心,通过串口与ARM微处理器系统进行通讯,根据ARM微处理器系统的下达指令对微波开关和衰减器进行直接控制,其中,取单片机的2位I/O来控制2个微波开关,取单片机的5位I/O来控制粗调衰减器,取单片机的另5位I/O来控制耦合端衰减器,采用D/A转换器将数字量转化成模拟量以实现微调衰减器(电调衰减器)的控制。
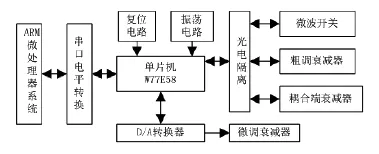
图4 微波组件控制电路组成框图
1.5 温度传感器
由于微波器件受温度的影响较大,为增强雷达有源校准器的环境适应性,需要配置温度传感器以便在不同温度下对系统进行自校准。
温度传感器采用美国DALLAS公司生产的一线式智能数字温度传感器DS18B20,它具有精度高、全数字化和连线少等优点[6]。为提高电路抗干扰能力,本系统中的DS18B20采用外部供电方式工作,其硬件连线如图5所示。
2 系统软件设计
系统软件主要实现系统校时、系统控制、数据显示和数据存储等功能。系统控制包括参数设置(RCS设置和衰减设置)、自校和转发功能。
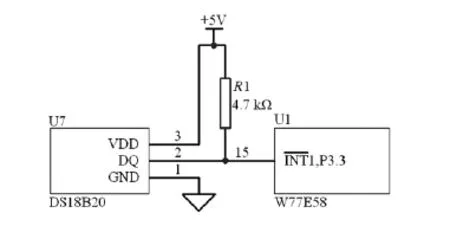
图5 温度传感器与单片机的连线图
2.1 开发平台构建
系统开发平台的构建流程[8]如图6所示,首先利用集成开发工具Microsoft Visual Studio 2005和Platform Builder对WinCE系统进行定制,包括系统组件的裁剪和系统源代码的修改等;然后根据开发板的特点编译WinCE工程并生成STEPLDR.bin、EBOOT.bin和NK.bin等WinCE镜像文件;最后导出对应镜像的SDK(Software Development Kit)即可进行应用程序开发。

图6 WinCE开发平台构建流程图
2.2 系统软件主程序设计
系统软件主程序流程图如图7所示,系统首先进行自检,确认各模块工作正常后即进入校时操作,校时的目的是根据当前GPS信息对系统时间进行修正,以便与所要校准的雷达进行时间同步。在正常使用的情况下,自校是必须进行的,只有进行了自校,系统才能达到所要求的精度,但是系统软件允许在不自校的情况下进行转发操作,这是考虑到有些不需要自校或者自校可能通不过的情况下也能让用户使用雷达有源校准器。
2.3 系统自校子程序设计
系统调试阶段,在-20℃~+50℃范围内,以5℃为一个步进,对需要的增益进行调整(通过调整粗调衰减器和微调衰减器来实现),并对温度、增益、参考电压、环路电压、参考电压与环路电压的差值等数据进行记录,存放在一个数据表中。在用户使用阶段,按照当前温度获取参考电压和环路电压并计算参考电压与环路电压的差值,然后将得到的差值与数据表中的相应温度下的差值进行比对并按照比对结果对环路增益进行调整,最终得到最佳的环路增益。系统自校的流程如图8所示。
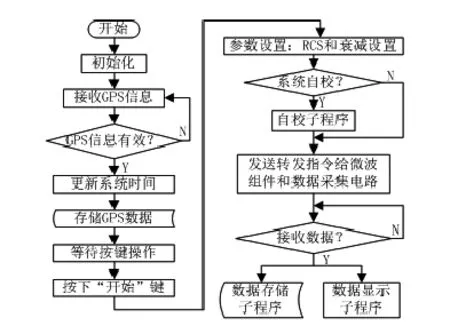
图7 系统软件主程序流程图
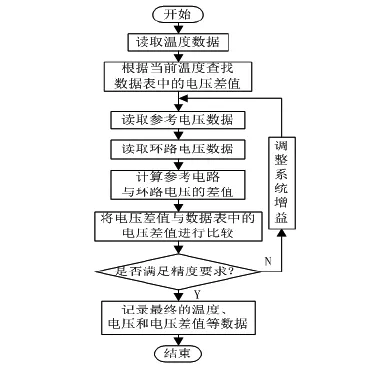
图8 系统自校子程序流程图
2.4 软件界面设计
雷达有源校准器一般都在野外使用,所以软件界面设计超大的触控按键以方便用户在野外环境下进行触控操作,软件菜单采用分级显示的方式实现软件的各个功能,第一级界面只有“开始”菜单和状态显示,第二级菜单具备参数设置和系统功能按键以便用户实现雷达有源校准器的各项功能,数据存储子程序自动在后台运行,将获取的数据以约定的格式存储于SD卡中,数据显示子程序将获取的数据以画图方式显示于软件的主界面,如图9所示。

图9 软件界面实况图
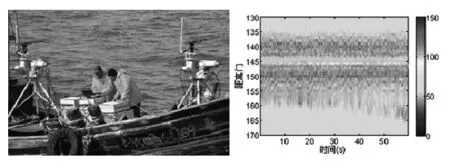
图10 外校准实况和数据处理结果伪彩图
3 应用
基于ARM微处理器的雷达有源校准器已多次应用于各类平台雷达的外校准试验,取得了良好效果。图10给出2016年3月某次岸基雷达海上外校准试验实况图和外校准数据处理结果伪彩图,由于试验是在海上进行,所以需要配合使用稳定平台以确保试验的有效性,实况图中三个白色机箱中偏低一点的便是雷达有源校准器。由数据处理维彩图可以看出,在第145个距离门处有一条明显的亮线,这便是雷达有源校准器的所处位置,所得数据再经过后期处理,便可得到岸基雷达的系统常数,即完成雷达系统的外部校准。
4 结语
本文提出一种基于ARM微处理器的雷达有源校准器,通过对ARM微处理器系统和嵌入式WinCE操作系统等的综合运用开发,实现了集控制、数据采集、数据存储和数据显示等于一体的功能完备的雷达有源校准器。目前,已经研制生产了3个波段共计7套基于ARM微处理器的雷达有源校准器,并多次应用于各类型号、产品的雷达外校准试验,其具有性能稳定、操作方便和精度高等优点,为获取高精度的雷达系统常数,进而分析杂波数据做出了应有的贡献。
[1]孙芳,康士峰,罗贤云.机载杂波测量雷达有源校准器的设计与分析[J].电波科学学报,2001,16(4):534-537.
[2]康士峰,葛德彪,张忠治等.机载杂波测量雷达的有源绝对校准技术研究[J].电子学报,2000,28(12):25-28.
[3]李振宇,迟岩,蔡惠茵.基于ARM微处理器的多通道数据采集系统[J].集美大学学报(自然科学版),2007,12(3):237-240.
[4]韦东山.嵌入式Linux应用开发完全手册[M].北京:人民邮电出版社,2008.
[5]Motorola GPS Products-Oncore User’s Guide.Motorola Inc,2002.
[6]顾振宇,刘鲁源,杜振辉.DS18B20接口的C语言程序设计[J].单片机与嵌入式系统应用,2002(7):22-24.
[7]张书峰,张岚,毛乐山.一种基于Windows CE的数据采集分析仪[J].仪器仪表用户,2009,16(2):34-36.
[8]Installation Manual for SMDK6410(Windows Embedded CE 6.0).Samsung Electronics Co.,Ltd,2008.
李善斌【通信作者】(1982—),男,工程师,主要研究方向:地海杂波测试方法、地海杂波测试硬件设计。
李慧明(1981—),男,工程师,主要研究方向:地海杂波测试与软件、地海杂波数据库与应用技术。
朱秀芹(1971—),女,博士,研究员,中国电子学会高级会员,主要研究方向:电磁场数值计算、雷达杂波特性分析。
Design of active radar calibrator based on ARM microprocessor
Li Shanbin1,Li Huiming1,Zhu Xiuqin1,Zhang Yushi1,Li Xin1,2
(1.Key Laboratory of Electromagnetic Environment and Modeling Technology,Research Institute of Radio Wave Propagation,Qingdao 266107,China;2.National Key Laboratory of Radar Signal Processing,Xidian University,Xi’an 710071,China)
To solve the problem that the traditional active radar calibrator has sole function,poor portability and low integration,a kind of active radar calibrator based on ARM microprocessor has been studied and implemented.The combination of ARM microprocessor system and embedded Windows CE operating system is developed for active radar calibrator to achieve the functions such as system control,system automatic time calibration,data collection,storage and display and so on.Engineering application indicates that this device has the advantages of comprehensive data collection,good portability and high integration.
ARM microprocessor;Active radar calibrator;WinCE
猜你喜欢
电子测试(2022年11期)2022-07-18
电子设计工程(2022年5期)2022-03-15
科学与信息化(2021年30期)2021-12-24
通信电源技术(2018年3期)2018-06-26
电子与封装(2017年4期)2017-04-24
火控雷达技术(2016年3期)2016-02-06
西北工业大学学报(2015年3期)2015-12-14
广西文学(2015年9期)2015-10-24
遥测遥控(2015年2期)2015-04-23
现代防御技术(2014年6期)2014-02-28