
四轮全向移动机器人转弯半径的研究
2017-04-18 10:17张皓
价值工程 2017年9期
张皓
摘要: 本文研究四轮全向移动机器人的转弯半径,通过对四轮移动机器人动力学建模和运动学分析,得出四轮全向移动机器人转弯半径的动力学方程,并根据四轮全向移动机器人的运动特性对未知量求解,从而得到四轮全向移动机器人转弯半径的动态方程,为进一步研究四轮全向移动机器人的机动性提供了理论基础。
Abstract: In this paper, the turning radius of a four-wheel omnidirectional mobile robot is studied. Based on the dynamics modeling and kinematics analysis of a four-wheel mobile robot, the turning radius of a four-wheel omni-directional mobile robot is obtained. The dynamic equation of the turning radius of four-wheel omnidirectional mobile robot is obtained, which provides a theoretical basis for further research on the maneuverability of four-wheel omni-directional mobile robot.
關键词: 四轮全向移动机器人;转弯半径;动力学方程
Key words: four-wheel omni-directional mobile robot;turning radius;dynamic equation
中图分类号:TP242 文献标识码:A 文章编号:1006-4311(2017)09-0117-03
0 引言
四轮移动机器人,是一个集环境感知、动态决策与规划、行为控制与执行等多功能于一体的综合系统。近年来,四轮移动机器人的应用范围大为扩展,不仅在工业、农业、医疗、服务等行业中得到广泛的应用,而且在城市安全、国防和空间探测领域等有害与危险场合得到很好的应用。
随着四轮移动机器人应用范围的不断增大,对四轮移动机器人机动性的要求也变得越来越高。四轮移动机器人的工作环境比较复杂,在种类繁多的环境中,良好的机动性可以使四轮移动机器人拥有更好的适应性,可以在更加广泛复杂的环境中完成工作。转弯半径是四轮移动机器人机动性的重要评价标准,同等外形标准的四轮移动机器人具有更小的转弯半径,可以使四轮移动机器人更加灵活,通过性更强,从而使四轮移动机器人的机动性更强。
目前,四轮移动机器人的转弯半径还没有比较深入的研究,本文通过对四轮全向移动机器人动力学建模和运动学分析,得出四轮移动机器人的转弯半径的运动学方程,从而可实现控制输入量得到四轮全向移动机器人输出变量转弯半径R的动态值。
1 四轮全向移动机器人动力学建模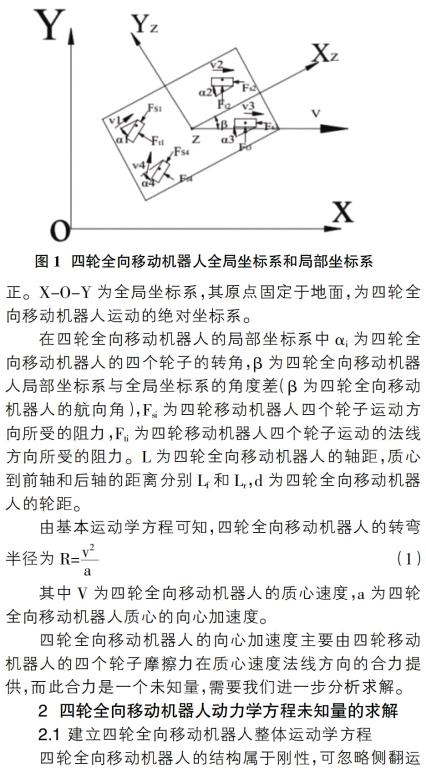
首先建立如图1示的四轮全向移动机器人的运动的局部坐标系,XZ-Z-YZ为固定于四轮全向移动机器人质心的动坐标系,XZ沿四轮全向移动机器人车身的纵向对称线方向,移动方向为正方向,YZ沿四轮全向移动机器人车身的横向对称线方向,垂直于用移动方向,向右为正。X-O-Y为全局坐标系,其原点固定于地面,为四轮全向移动机器人运动的绝对坐标系。
在四轮全向移动机器人的局部坐标系中?琢i为四轮全向移动机器人的四个轮子的转角,β为四轮全向移动机器人局部坐标系与全局坐标系的角度差(β为四轮全向移动机器人的航向角),Fsi为四轮移动机器人四个轮子运动方向所受的阻力,Fti为四轮移动机器人四个轮子运动的法线方向所受的阻力。L为四轮全向移动机器人的轴距,质心到前轴和后轴的距离分别Lf和Lr,d为四轮全向移动机器人的轮距。
其中V为四轮全向移动机器人的质心速度,a为四轮全向移动机器人质心的向心加速度。
四轮全向移动机器人的向心加速度主要由四轮移动机器人的四个轮子摩擦力在质心速度法线方向的合力提供,而此合力是一个未知量,需要我们进一步分析求解。
2 四轮全向移动机器人动力学方程未知量的求解
2.1 建立四轮全向移动机器人整体运动学方程
四轮全向移动机器人的结构属于刚性,可忽略侧翻运动,所以本文建立的四轮全向机器人运动学模型有11个自由度,其中机器人本体具有纵向、横向、横摆三个自由度,每个轮子各有一个转动和转向的自由度。
上式中m为四轮全向移动机器人的总质量(kg),IZ为四轮全向移动机器人以质心的垂线为中心的的转动惯量(kg/m2),wR为四轮全向移动机器人的横摆角速度,FXi是四轮全向移动机器人四个轮子受力在四轮全向移动机器人局部坐标系XZ轴方向的分力,FYi是四轮全向移动机器人四个轮子受力在四轮移动机器人局部坐标系YZ轴方向的分力。
2.2 四轮全向移动机器人的车轮转角的分析
四轮全向移动机器人在行驶过程中,由于路面的侧向倾斜,侧向风或者曲线行驶时的离心力等的作用,车轮中心沿车轴方向产生一个侧向力F。因为车轮是有弹性的,所以,在侧向力F未达到车轮与地面间的最大摩擦力时,侧向力F使轮胎产生变形,使车轮倾斜,导致车轮行驶方向偏离预定的行驶路线。这种现象,就称为轮胎的侧偏现象。
四轮全向移动机器人轮胎的中心线,在侧向力F的作用下,与车轮平面错开了一定距离,而且有一个倾斜角,这个倾斜角,就叫做轮胎的侧偏角。
因此我们以图2描述四轮移动机器人单个轮胎的地面投影方向情况,深入分析四轮移动机器人车轮的转角与转弯半径之间的关系。将四轮移动机器人的车体坐标系XZ-Z-YZ平移到车轮上,如图2所示,vi为四轮全向移动机器人车轮的实际速度,FS沿着车轮转动的平面方向,Ft垂直车轮转动平面,α为车轮转角,δ为轮胎偏移角,角度ε为引入变量。
式(17)可知,求解四轮全向移动机器人向心力需首先求解四轮全向移动机器人的轮胎偏移角?啄,由式(13)、式(14)、式(15)、式(16)可知求解四轮全向移动机器人轮胎偏移角需首先求出四轮全向移动机器人的航向角β,四轮全向移动机器人的横摆角速度wR。
2.3 四轮全向移动机器人在局部坐标系的加速度分析
如图3所示,为利用四轮全向移动机器人的局部坐標系进行运动分析,四轮全向移动机器人的质心速度V于t时刻XZ-Z轴的分量u=Vcosβ,在Z-YZ轴的分量v=Vsinβ,由于四轮移动机器人在转向行驶的过程中伴随着平移和转动,在t+?驻t时刻,质心的速度大小和方向都会发生变化,而四轮移动机器人的局部坐标系也是在不断变化的,故沿XZ-Z方向的速度分量变化为:
由上可知,当四轮移动机器人质量m、轴距L、轮距d确定的情况下我们可以通过控制输入向量[V ?啄1 ?啄2 ?啄3 ?啄4]得到输出值四轮全向移动机器人的转弯半径R的动态值。
3 结束语
本文首先对四轮全向移动机器人动力学建模,得出求解四轮全向移动机器人转弯半径R的基本公式,通过对四轮全向移动机器人运动学的分析以及对轮胎偏移角的研究进一步求解未知量,从而得到了一个可通过控制输入向量[V ?啄1 ?啄2 ?啄3 ?啄4]输出的四轮全向移动机器人转弯半径的动态方程,为进一步研究四轮全向移动机器人的机动性提供了理论基础。
参考文献:
[1]任孝平,蔡自兴.基于阿克曼原理的车式移动机器人运动学建模[J].智能系统学报,2009,4(6):534-537.
[2]熊蓉,张翮,褚健.四轮全方位移动机器人的建模和最优控制[J].控制理论与应用,2006,23(1):93-98.
[3]陈少斌,蒋静坪.四轮移动轨迹跟踪的最优状态反馈控制[J].浙江大学学报,2009,12(43):2186-2190.
[4]YI J G,SONG D Z,ZHANG J J et al. Adaptive trajectory tracking control of skid-steered mobile robot [C]∥Proceedings of the IEEE International Conference on Robotics and Automation. Roma,Italy:IEEE,2007:2605-2610.
[5]TAMAS K N,PRITAM, RAFFAELLO D ANDREA. Real time trajectory for omnidirectional vehicles [C]∥proceedings of the American Control Conference A laska USA:IEEE,2002.1:286-291.
[6].RATNER D, NOVALES C,VIEYRES P. Dynamics of the Titan four wheel drive mobile robot with floating Ackerman steering [C]∥Brisbane,1999:144-149.
