
拖线阵声纳探测技术研究现状及发展趋势
2017-04-18 02:52徐雅倩
价值工程 2017年9期
关键词:水面
徐雅倩
摘要:对水面/下目标探测的需求促进了拖线阵声纳探测技术的发展,拖线阵声纳探测技术的快速发展,使其成为现代水面/下目标探测、反潜战中不可或缺的技术。因此,由必要追踪了解拖线阵纳探测技术中水听器技术、成阵技术、信号处理技术的研究现状,并从流噪声抑制、信号处理技术、多平台协同探测方面预测拖线阵声纳探测技术的发展趋势。
Abstract: The demand for surface/underwater target detection promotes for towed line array sonar detection technology, and due to the rapid development, towed line array sonar detection technology plays an increasingly indispensable role in the surface/underwater target detection and anti-submarine warfare. Therefore, it is necessary to track the current research status of hydrophone technology, organizing array technology and signal processing technology of towed linear array sonar, and to predict the development trend of flow noise suppression, signal processing technology and cooperating detection of towed line array sonar.
关键词:拖线阵声纳;声纳探测技术;水面/下目标探测;反潜战
Key words: linear array sonar;sonar detection technology;surface/underwater target detection;anti-submarine warfare
中图分类号:TB566 文献标识码:A 文章编号:1006-4311(2017)09-0237-05
0 引言
依据声波在水中具有的远距离传播特性,人们实现了对水面/下目标的远距离导航、定位、跟踪和识别,同时具有这种功能的设备又被称为声纳[1-4]。
传统的声纳大都需要依托搭载平台实现对水中声波的接收和转换,该情况会受到如下诸多限制[5]:①空间限制,由于平台自身空间有限,进而限制了依托于平台本身的声纳体积发展,特别是阵列声纳,制约了声纳性能的提高;②噪声限制,声纳需要依靠其接收的水声信号实现对水中目标探测,来自搭载平台的自噪声将成为主要干扰源被声纳接收,影响声纳对水中目标的探测性能;③工作深度限制,水声信号在受水文条件影响,会在不同位置形成“会聚区”和“声影区”,如果搭载平台不能位于 “会聚区”,将不能接收到最佳的水声信号,搭载平台不能根据当时水文条件(声速分布情况)的变化而改变声纳深度,将影响声纳最佳接收水声信号。拖曳变深声纳的出现,突破了上述局限。为了扩展阵列声纳孔径,变深声纳的拖体被演变成数百米、上千米的长线阵列,形成了现在的拖曳线阵列声纳(又称“拖线阵声纳”)。
1 拖线阵声纳简介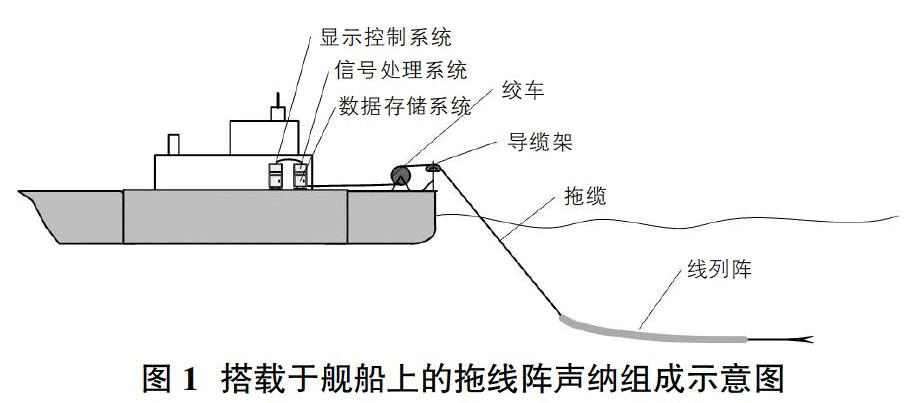
拖线阵声纳通过接收水面/下目标自身辐射的噪声或者通过接收水面/下目标反射的主动信号的回波实现对目标的检测并估计相关参数。该声纳可分为如下两类:被动拖线阵声纳和主/被动联合拖线阵声纳。被动拖线阵声纳具有隐蔽性强的优势,能够被水面舰艇、潜艇、无人航行器拖曳,其原理是通过接收到的目标辐射噪声实现目标探测;而主/被动联合拖线阵声纳既可以通过被动接收到的目标辐射噪声实现对目标探测,又可以通过主动发射信号经水面/水下目标反射后的回波实现对目标探测,是探测辐射噪声级日益降低的潜艇的重要手段,通常由水面舰艇拖曳。
如图1所示,被动拖线阵声纳通常由以下几个部分组成[5]:
①线列阵:用于接收目标辐射噪声或目标回波,它由按照一定间距布放的若干个拾取水下声学信号的压电水听器,以及与水听器相配套的前级放大模块、数据采集模块、中继模块、电源模块组成,并配有用于水下姿态、深度监视的传感器模块,以及用于降低线阵线列阵抖动的隔振结构。随着光纤水听器技术和光纤水听器成阵技术的快速发展,未来将呈现出多种多样的全光纤线列阵,使得线列阵外径显著减小且无需从甲板向水下供电,适装性和可靠性将得到明显改善。
②拖曳收放系统:用于拖曳、布放和回收线列阵,包括拖缆、导缆架和绞车。
③信号处理系统:用于處理各种信息,随着线列阵搭载设备集成传感器种类越来越多,拾取的信息越来越丰富,信号处理系统不只是简单依靠水听器拾取的声学信号实现对目标检测和有关参数估计,还需对各类传感器拾取信息进行融合,实现对水面/水下目标精确检测,更多参数的精细估计、分类和识别。
④显示控制系统:用于将信号处理系统处理的结果进行显示,与其他系统进行信息交换,并将控制命令下发给有关系统;随着计算机技术和显示技术的快速发展,显示控制系统不只是简单依据显示屏对信号处理系统处理结果的二、三维显示,将结合新兴显示技术和各类传感器上传信息实现对探测场景多维度重构和显示。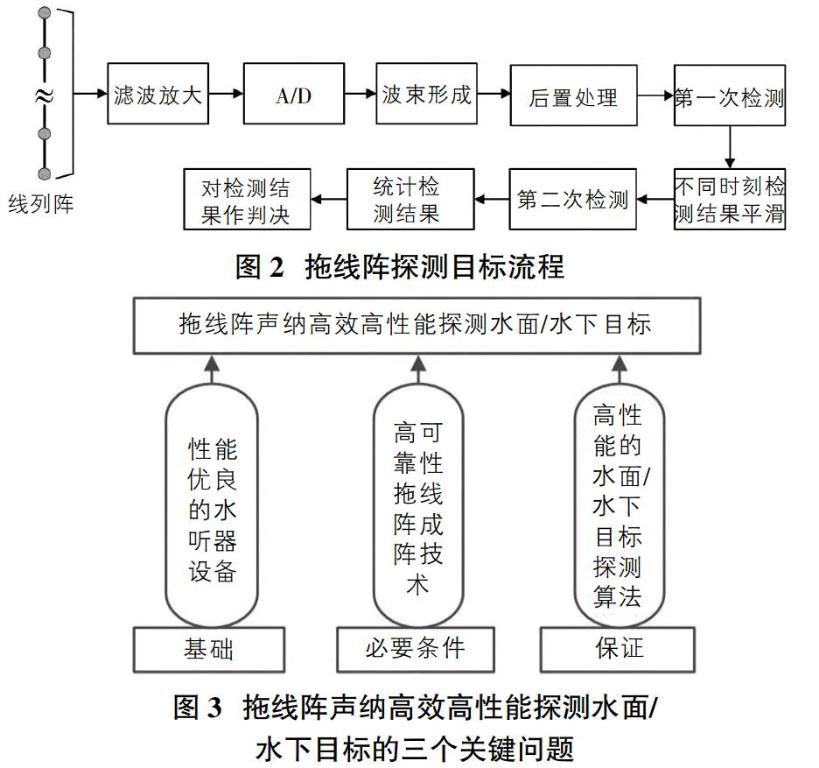
⑤数据记录系统:用于对各种传感器拾取数据的存储,由于拖线阵声纳工作环境多性,要想实现对数据存储时刻的探测场景多维度重构和显示,必须无失真存储各种传感器拾取数据。
主/被动联合拖线阵声纳还需要包括发射换能器基阵、相应的拖曳收放系统及发射机等几部分。
总之,相比依附于搭载平台的声纳,拖线阵声纳因其具有大孔径基阵、离搭载平台噪声远、可充分利用海洋声场特性对水面/水下目标进行探测等优点,大大提高了声纳作用距离和对工作环境的普适性。经过多年的发展,拖线阵声纳己成为各国海军有效探测日益安静潜艇的最重要声纳装备之一,也被誉为“探潜先锋”。
2 拖线阵声纳探测原理
拖线阵声纳是基于背景噪声和信号的不同统计特性,将线列阵中多个水听器在同一时刻拾取的数据,经过与方位相关的延时或相移补偿处理,再通过能量积累,获得输出能量最大的方向,该过程又被称为“波束形成”,最后再对波束形成结果进行一系列处理实现对目标探测。拖线阵探测目标流程如图2所示。第二次检测结果为最终探测结果,确定信号的有无,通过对第一次检测结果的平滑处理降低第一次检测的虚警概率。
波束形成实现方式分为时域和频域,时域波束形成具体实现步骤如下:首先按处理频带需求对各基元拾取数据进行滤波,然后对各基元滤波后数据按方位进行时延补偿、累加、求和,完成时域波束形成。频域波束形成具体实现步骤如下:首先对各基元拾取数据做FFT分析,然后在分析频带中每一频率单元,对各基元频域数据按方位进行相位补偿、累加、求和,完成频域窄带波束形成,最后对各频率单元波束形成结果累加实现宽带波束形成。
波束形成是拖线阵声纳探测目标流程的核心部分,通过波束形成拖线阵可获得可观的空间增益,从而提高输出信噪比实现对目标的检测。以频域波束形成为例,其实现算法如下:
设线列阵包含水听器数为N。对第i个水听器拾取数据xi(t)进行采样,取L点作FFT运算,即
根据海洋环境噪声的统计特性,当水听器间距为半波长时,各水听器接收到的海洋环境噪声基本相互独立,波束形成空间增益达到10lg(N)。在拖线阵声纳中,水听器正是按照这个间距来布放,水听器的数目越多获得增益就越大,对目标的探测能力就越强,这也是拖线阵声纳孔径(线列阵长度)越多越大的原因。
3 拖线阵声纳探测技术研究现状
在近30~40年内,西方发达国家的潜艇辐射噪声级大约以每年0.5~1dB的速度降低,从而使其被探测的距离每年缩小0.5~2km,这无疑给拖线阵声纳探测潜艇带来极大挑战。对此想要实现拖线阵声纳高效高性能探测舰艇、潜艇等水面/水下目标,需具备如图2所示的三个关键技术,具备高性能的水面/水下目标探测算法是“保证”,具备高可靠性大规模阵列成阵技术是“必要条件”,具备性能优良的水听器设备是“基础”。
3.1 水听器技术
水听器能够远距离发现、跟踪和识别安静型目标,是用于接收水中声学信号的换能器设备,对于探测目标具有关键作用,是探测过程中不可或缺的设备,因此,必须加强对其的研究,尤其是换能机理、新型材料、结构形式等方面 [6]。目前西方发达国家已经研制出了多种新型高性能水听器,其中大部分都采用了新型材料,比如压电复合材料、弛豫铁电单晶材料、光纤材料等。与传统的压电陶瓷材料相比,这些新型的材料具有很多优势,性能更加完善,操作也更加简便,是一次革命性的进步。关于这些新型材料的研究还有很多,相关部门和专家对此予以了高度重视。
光纤水听器从声传感机理上分为强度型、偏振型和干涉型3种。由于前两种类型灵敏度较低,且不适合大规模组阵,因此目前实用化的光纤水听器均为干涉型。干涉型光纤水听器通过水中声波对光纤的压力作用使光纤芯的折射率或长度发生变化,进而引起在光纤中传播的光束光程发生变化,致使相位发生变化,然后采用干涉测量技术检测出相位变化,最终得到声压信息。和压电陶瓷或压电晶体型的水听器相比,光纤水听器具有灵敏度高、响应频带宽、重量轻、易复用、可进行超远距离传输、不受电磁干扰、无信息泄漏等优点。
无电、轻便、细小、易复用的光纤水听器对于在拖曳阵方面的应用具有绝对诱人的魅力。对此,西方部分国家已开展光纤水听器的研究,并将光纤水听器阵列用于远程探测试验,取得相当的进展,力求使其满足实际装备的需求。2007年,澳大利亚科学家开展了16元光纤水听器拖曳线列阵海上试验;2008年英国QinetiQ公司在挪威海岸使用一条长1.4km的256基元光纤水听器基阵进行了海上试验;2008年,挪威Optoplan公司利用光纤水听器组成了200基元的声纳系统,并进行海上试验。
3.2 线列阵组阵技术
线列阵是一个具有特殊分布式的数据采集系统,它的整体结构为线性,并包含大量的采传节点,呈链式结构排列[7]。要形成一条高可靠性线列阵必须具备实现如下关键技术的能力:电噪声干扰屏幕能力,高速同步数据采集能力,高速无失真传输能力。
到目前为止,我国仍然缺乏制造具有自主知识产权且实用化的高性能拖线阵成阵技术。在民用方面,国外对出口我国拖线阵存在严格的技术封锁和限制,一些关键技术和关键信息我国都无法获悉。在军用方面,国外很早之前就开始了相关的研究,多年以来成果显著,比如美国的AN/SQR-19拖线阵声纳的线阵长度已达千米,且监视拖线阵系统(SURTASS)警戒阵线阵长达1828m,阵增益高的多线阵以及采用光纤水听器和光纖作为传输介质的全光纤阵列。
反观我国相关军用系统的现状发现,我国在很多方面都落后于国外发达国家,比如自动化程度方面、工作可靠性方面、性能指标方面等。这些落后的现状制约了我国拖线阵声纳在海洋权益维护以及国防建设的应用,必须采取有效措施改变落后现状。
3.3 信号处理技术
通过采用先进的信号处理技术来提高拖线阵声纳的性能是解决对水下目标远程探测的途径之一。在主动探测中,主动发射声波“照射”目标,而后接收水中目标反射回波以探测目标和有关参数估计,根据海洋信道的不均匀性和时变性,研究海洋声场多径传输和混响技术,如基于发射信号设计的混响和多途抑制等技术。在被动探测中,主要是被动接收水中目标产生的辐射噪声以测定目标方位和相关参数,为了提高检测信噪比必须开展噪声抑制、多目标检测和时变多径传播等技术的研究。
当前国际上关于噪声时空特性分析及噪声抑制等的信号处理方法,主要有自适应滤波、人工神经理论、混沌理论、小波变换、分维变换与时间反转算法等。美国AN/SQR-19拖线阵声纳采用了能有效抑制本艇噪声和多途干扰的时空联合处理等信号处理技术,探测远程目标距离达128km。多目标检测是复杂环境下对抗水中武器装备和感知远程目标的重要战技性能,当前主要的处理方法有参数模型法、正交子空间法等,尤其是基于贝叶斯理论的多目标检测新方法,可获得很高的多目标分离效果。
以上信号处理技术均与拖线阵声纳探测远程目标所获时间增益有关,所获时间增益越大,信号处理技术所能达到效果越好,考虑到各种技术的工程普适性,拖线阵声纳在探测目标获得时间增益所用信号处理技术主要为能量累积技术和窄带滤波检测技术[8,9]。
3.3.1 宽带能量检技术
在传统宽带检测体制下,能量检测器常被作为最佳检测器用于高斯噪声背景下高斯信号的目标检测。
其处理增益大于能量检测器处理增益,所以在检测具有强线谱的目标时常使用基于FFT分析的检测方法。
4 拖线阵声纳探测技术发展趋势
由于低频声传输衰减小,而且潜艇降噪在低频段能达到的效果要比在中高频段差得多,同时消声瓦对于目标反射低频信号强度降低也很有限。所以,发展和采用低频、宽带、大孔径拖线阵、先进的水声传播理论模型和信号处理方法,用更精致实用的海洋声环境模型和物理特征,采用一体化最佳综合配置的拖线阵声纳系统,创造出高性能数字智能型拖线声纳,可以使面临挑战的拖线阵声纳探测技术获得发展,实现对水面/水下目标远程探测。
4.1 进一步抑制流噪声对线列阵影响
发展和采用低频、宽带、大孔径线列阵是提高拖线阵声纳探测远程水面/水下目标最直接的方法,但是拖线阵是以对应中心频率半波长为间隔布置该频段所用水听器,增大声阵孔径就意味着增加阵长,随着阵长的增加,在拖线阵直径不变情况下,就要求增大拖线阵存储空间。因而为了在搭载平台有限的存储空间中容纳长阵,减小舰船、潜艇和AUV/UUV等搭载平台对拖线阵声纳性能的影响,就必须减小线列阵直径,进而发展小直径细线拖线阵声纳,另外发展细线拖线阵声纳也可以线列阵的性价比[10]。因而细线拖线阵声纳是拖曳阵声纳,特别是潜艇和AUV/UUV等水下平台拖曳声纳的主要发展方向。
但是拖线阵声纳在探测远距离探测目标时,对探测效果起重大制约因素的是流噪声[11-16],拖曳的速度越高,线阵中水听器拾取数据中的流噪声成分越强。在拖速大于10节时,流噪声已经成为限制低频段声纳探测性能的主要因素,特别是对舰载拖线阵声纳,随着拖曳速度的提高,其工作性能将大大下降,直至不可用。因此抑制拖线阵声纳流噪声,就成了提高拖线阵声纳性能的关键因素之一。
拖线阵流噪声主要由流激缆阵振动和湍流边界层(TBL)起伏压力引起的两大类噪声组成。对振动流噪声抑制主要通过设计隔振段、改进水听器结构和安装结构设计来实现;对湍流噪声抑制主要集中在理论建模、实验测量上。根据流噪声形成机理,技术处理上在水听器满足工作稳定性、可靠性和高接收灵敏度前提下,尽可能选择低的加速度灵敏度值,尽可能减小水听器直径,增加护套表面与水听器接收面之间的距离;在护套滿足强度要求情况下,尽可能采用柔软黏弹性材料,材料切变波衰减因子尽量大,在护套内外适当位置添加其他阻尼结构件降低呼吸波能量传输;采用高性能隔振模块来隔离拖缆抖动和尾部摆动等产生的低频流噪声[17,18];研究高性能水听器成组化技术,利用M个水听器形成一组,作为一个通道输出,使其通道直接流噪声降低至1/等等,进一步降低流噪声对细线拖线阵声纳影响,提高细线拖曳声纳对远距离目标的探测性能。
4.2 采用先进的信号处理技术
以模基处理技术、环境自适应处理技术、宽容性信号处理技术、匹配场过滤技术和数据融合处理技术等为代表的现代声纳信号处理技术[19-29]对提高拖线阵声纳远程探测目标起着重要作用。传统的声纳信号处理一般是建立在简单的声传播模型(均匀介质,直线传播)的基础上,而实际的声传播模式复杂多变。通过开展复杂多变海洋环境条件下声传播机理和特性研究,结合对水声信道参数测量,建立实时适应环境的水声信道模型,再以此为基础采用多信息融合的声纳信号处理手段进行处理分析。通过上述“模基处理”来获得更大的实际处理增益,在模型匹配很好时达到最佳探测效果。
另外,理论和实验证明,水下目标辐射噪声含有丰富的低频线谱成份[8,9],通常线谱谱级比连续谱谱级要高出 10~25dB。在小信噪比下,基于宽带能量累积的常规被动声纳探测技术已远远不能满足远程探测的需要,在高斯宽带噪声背景下,研究有别于宽带能量累积的目标探测方法,以便利用目标辐射噪声中的线谱成份实现对远程目标的探测[26-29]。所以,在拖线阵声纳在探测目标获得时间增益所用信号处理技术方面,需要对各频率单元波束输出结果进行特征信息分析,提取不同频率单元波束输出结果所具有的不同特征信息,然后对各频率单元波束输出结果进行信息融合,综合宽带能量累积和FFT分析对目标检测所具有的优势,克服宽带能量累积和FFT分析对另一情况下存在的检测性能不足,得到高增益宽容性信号处理技术。
现代声纳系统是典型的多传感器系统,多个传感器获得的大量数据经过数据融合处理可以极大提高声纳系统信息的综合利用程度,提高远程信息感知能力。日新月异的数据处理软硬件技术的发展为数据融合的应用提供了坚实的基础,大力采用数据融合技术己成为现代声纳的发展特点。目前,数据融合技术最广泛的应用是多目标跟踪,它充分利用多传感器的探测结果,可靠准确地估计目标状态。对声纳内部的声信息进行融合处理,将能更有效、更全面地实现目标的远程探测、定位、跟踪和识别。
4.3 多平台协同探测
随着编队协同作战和网络中心战的发展[30-32],潜艇、水面舰船、AUV/UUV等的水下隐蔽通讯及信息综合成为优先发展的关键技术,编队协同作战和多平台与多传感器的联合探测是未来水下战的有效作战模式。例如,在某一水海域展开作战,首先利用潜艇、水面舰船、AUV/UUV搭载拖线阵声纳以编队形式进行联合探测,进行远距离水面与水下立体搜索、消除盲区,形成水面与水下立体区域警戒与通信系统;其次,由立体区域警戒与通信系统将水面/水下目标、敌方潜艇信息传送至卫星或编队,指挥系统快速将相关命令下达给作战编队。可以肯定,对多拖线阵声纳协同作战的研究和实践将为水面/水中目标探测、海军作战和海洋开发带来巨大变革和广阔前景。
另外,对于主/被动联合探测方式的拖线阵声纳,相比单平台探测,多平台探测具有收发分置的灵活性,受混响的影响小,不易被目标发现等优势,在较大范围内布置较多的接收拖线阵,近而大大地扩展了探测范围,提高了对目标的探测效率。
参考文献:
[1]王庆光,张文玉,宋汝刚.西方海军远程探测声纳发展现状[J].舰船论证参考,2004(2):44-45.
[2]解宝兴,郝拥军,程玲.水下远程探测的研究和发展方向[J]. 舰船科学技术,2008,30(3):17-21.
[3]邵云生,彭会斌,宋君才.国外拖曳线列阵声纳技术现状与发展趋势[J].舰船电子工程,2011,31(1):10-12.
[4]CHARLIE W, ZHU Ke-qiang, ZHANG Tian-yu, et al. Evaluation current research status and development trend of towed multi-line array sonar of domestic[J]. SHIP SCIENCE AND TECHNOLOGY, 2013, 35(7): 1-6.
[5]余华兵,孙长瑜,李启虎.探潜先锋——拖曳线列阵声纳[J].物理,2006,35(5):420-423.
[6]运朝青,罗洪,胡正良,等.应用于拖曳细线阵的光纤水听器研究[J].光学学报,2012,32(12):84-88.
[7]蒋佳佳.水声阵列探测算法及系统关键技术研究[D].天津大学博士学位论文,2014.
[8]李启虎,李敏,杨秀庭.被动目标辐射噪声中单频信号分量的检测:理论分析[J].声学学报,2008,33(3):193-196.
[9]李启虎,李敏,杨秀庭.被动目标辐射噪声中单频信号分量的检测:数值仿真[J].声学学报,2008,33(4):289-293.
[10]运朝青,胡正良,胡永明.细线拖曳声纳研究进展[J].半导体光电,2012,33(5):618-623.
[11]祝献,葛辉良.拖曳线列阵流噪声抑制实验[J].噪声与振动控制,2016,36(3):219-221.
[12]ANDREW KNIGHT. Flow noise calculations for extended hydrophones in fluid- and solid-filled towed arrays[J]. Acoust. Soc.Am., July 1996 (100): 245-251.
[13]CIPOLLA K M,KEITH W L. Measurements of the wall pressure spectra on a full-scat a experimental towed array[J]. Ocean Engineering, 2008, 35(10): 1052-1059.
[14]王斌,汤渭霖,范军.水听器非轴线布放时的拖曳阵流噪声响应[J].声学学报,2008,33(5):402-407.
[15]李颖灿.Sentinel固体电缆降噪原理[J].物探装备,2013,23(1):15-18.
[16]张伟宁,刘庆文,吴琳.拖曳线列阵流噪声抑制结构设计参考[J].海洋工程装备与技术,2015,2(4):280-283.
[17]顾振福,刘孟庵,洪有財,等.拖曳线列阵声纳中隔振模块研究[J].海洋工程,2002,20(2):65-69.
[18]江国和,王国治,洪有财,等.拖曳声纳阵隔振模块性能实验分析[J].噪声与振动控制,2003,20(3):45-48.
[19]李启虎.水声信号处理领域新进展[J].应用声学,2012,31(1):2-9.
[20]URICK R J. Principle of underwater sound[M].3rd Ed. McGraw-Hill, 1983.
[21]MCDONOUGH R N,、WHALEN A D. Detection of signals in noise[M].2nd Ed. Academic Press, 1995.
[22]CAMDY J V Model based signal processing in the ocean[J]. IEEE Oceanic Engr. Society News Letter, 2000, 25(3): 199-205.
[23]PORTER M B. Acoustic models and sonar systems [J]. IEEE J.of oceanic Engr, 1993, 18(4): 425-437.
[24]KASSAM S A, POOR H V. Robust techniques signal processing[J]. Proc. Of IEEE, 1985, 73(3): 433-481.
[25]SULLIVAN E J, MIDDLETON D. Estimation and detection issues in matched field processing [J]. IEEE. Of Oceanic Engr,1993, 18(3): 156-167.
[26]邱秀分,石文峰,孙春艳,申和平.大孔径光纤拖曳线列阵阵形估计对目标测向精度的影响[J].舰船电子工程,2016(11).
[27]陈阳,赵安邦,王自娟,等.瞬时频率方差加权导向最小方差波束形成检测器[J].哈尔滨工程大学学报,2011,32(6):730-735.
[28]陈新华,鲍习中,李启虎,等.水下声信号未知频率的目标检测方法研究[J].兵工学报,2012,33(4):471-475.
[29]郑恩明,陈新华,孙长瑜.基于幅值加权的未知线谱目标检测方法[J].振动与冲击,2014,33(16):160-164.
[30]KENNEDY F D. Experimentation: the key to transformation [J]. Undersea warfare, 2003, 5(1): 3-10.
[31]ALBERT D S, GARSTKA JJ, STEIN F P. Network centric warfare: developing and leveraging information superiority [J]. CCRP,USA 2nd Ed, 2002.
[32]WALROD J. Sensor networks for network centric warfare [J]. Proc. of NCW conference, Fall Church, VA Cat, 2000.
猜你喜欢
动漫界·幼教365(中班)(2021年3期)2021-04-06
好孩子画报(2020年6期)2020-06-27
课外生活(小学1-3年级)(2020年2期)2020-03-09
摄影之友(影像视觉)(2017年8期)2017-11-27
知识经济·中国直销(2017年4期)2017-05-04
学与玩(2017年5期)2017-02-16
