
高频信号注入的无轴承同步磁阻电机转子位移检测方法
2017-04-14 05:53张汉年鲍安平段向军
微特电机 2017年3期
张汉年,鲍安平,段向军,张 涛
(1.南京信息职业技术学院,南京 210023;2.淮阴工学院,淮安 223003)
高频信号注入的无轴承同步磁阻电机转子位移检测方法
张汉年1,鲍安平1,段向军1,张 涛2
(1.南京信息职业技术学院,南京 210023;2.淮阴工学院,淮安 223003)
无轴承同步磁阻电机转子位移一般需由机械式位移传感器检测获取,但安装位移传感器会带来电机结构复杂、轴向长度增大等缺陷,故需新的转子位移检测方法。分析了电机转子偏心下悬浮绕组电感和转子位移之间线性关系,通过在悬浮绕组注入高频信号,检测其感生出的差分电压,经信号处理,可提取差分电压中的转子位移信号,实现了被控电机转子位移准确观测。仿真证实,此方法检测精度较高,能实现电机的稳定悬浮运行。
高频信号注入;无轴承同步磁阻电机;差分电压;转子位移检测
0 引 言
无轴承同步磁阻电机是利用定子槽中转矩绕组电流和悬浮绕组电流共同作用来改变合成气隙磁场的分布,从而实现电机转速、转矩和悬浮的多变量协同控制[1]。凸极转子无轴承同步磁阻电机机械结构较为坚固,较易控制,在高速高精度数字机床、高速飞轮储能发电、超静音家用电器等电气传动应用领域,具有较大的应用价值。
为提高无轴承同步磁阻电机控制性能,悬浮系统均采用闭环控制,系统实现时,通常由机械式电涡流位移传感器来检测闭环转子位移反馈信号。但装配位移传感器将降低控制系统的可靠性、破坏电机结构的坚固性、增大系统的硬件复杂程度和增加系统总成本[2]。为去除无轴承同步磁阻电机附加的位移传感器,需采用一些新的控制方法。
文献[3]采用基于改进电压模型的无轴承同步磁阻电机转子位移估计方法,但该策略完全依赖电机磁链方程,低速运行时控制性能较差。高频信号注入法在其它类型电机无速度传感器和无位移传感器控制中应用较多[4],但在无轴承同步磁阻电机无位移传感器中的应用甚少。文献[5-6]是在无轴承同步磁阻电机转矩绕组注入高频信号实现转子径向位移估算,但在转矩绕组注入高频信号加剧了电磁转矩的脉动,强化了转矩和悬浮力之间的耦合关系。
为实现无位移传感器下的无轴承同步磁阻电机悬浮运行,本文采用基于悬浮绕组高频信号注入法的转子径向位移检测方法,进行了无位移传感器仿真研究,验证了上述方法的可行性。
1 悬浮绕组差分电压检测原理
正常工作条件下,无轴承同步磁阻电机转子径向位移与电机悬浮绕组自感存在线性关系,这是向悬浮绕组注入高频信号来获取转子位移的理论依据[7]。图1中,电机悬浮绕组为2极,α绕组表示其水平方向绕组,α绕组由α1和α2两个结构相同的绕组串联而成。当α绕组通入高频电压信号时,将产生高频脉振磁场。当转子处于定子中心位置时,α1和α2绕组产生的自感相等,其感生出的差分电压为零。当转子偏移中心位置时,α1和α2绕组的自感大小有差异,进而感生出的差分电压不等于零,此差分电压中能提取转子径向位移信号,可实现电机的无位移传感器控制。
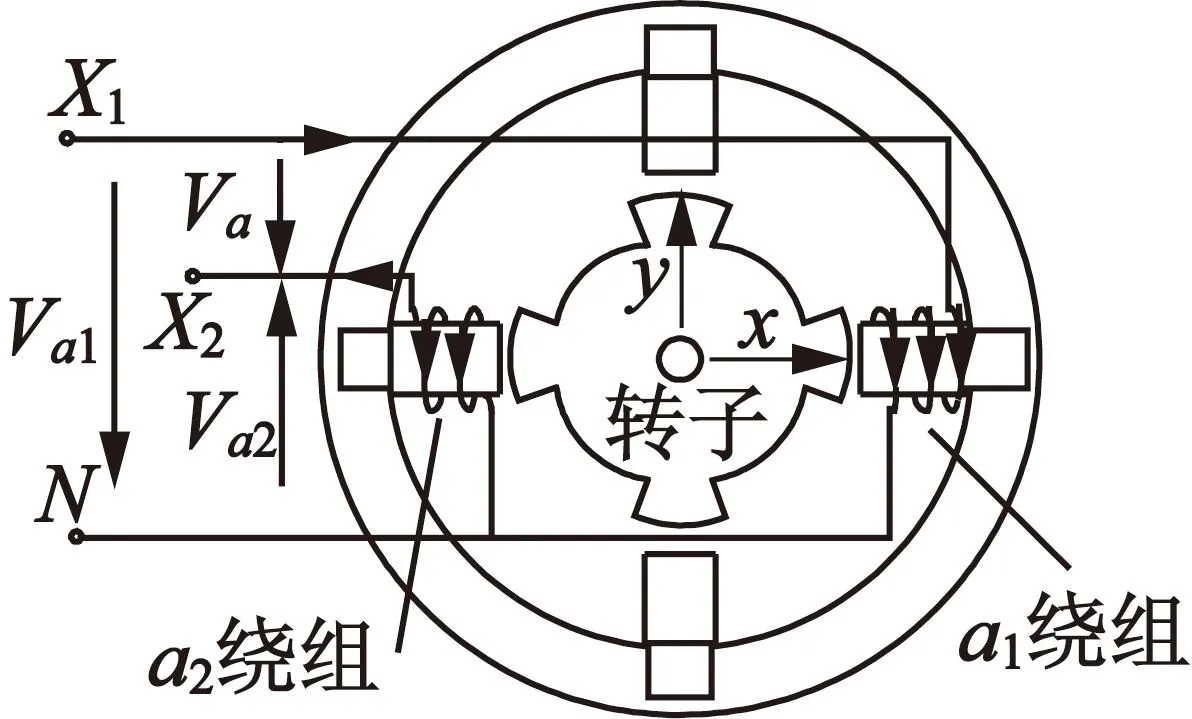
图1 悬浮绕组差分电压检测原理
2 高频信号法转子位移检测原理
2.1 悬浮绕组电感与转子位移关系模型
无轴承同步磁阻电机样机为4极转矩绕组和2极悬浮绕组,电机凸极转子极弧角度为30°,转子有两段不同长度的气隙,转子凸极区域的气隙为δ0,两凸极之间区域气隙为δ1,假设δ1远大于δ0,在转子偏心条件下,气隙长度变化如图2所示。可得:
式中:为0到2π间的转子位置角度;α,β分别为x,y轴方向转子偏心位移。
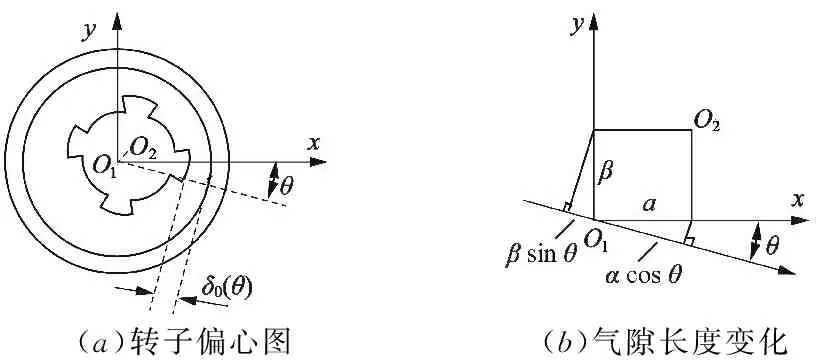
(a)转子偏心图(b)气隙长度变化
图2 转子偏心时气隙长度
依据式(1),可得计及转子偏心时单位面积的磁导P(θ):
式中:μ0为真空磁导率; r为转子外径;l为电机铁心长度。
电机悬浮绕组的气隙磁动势基波幅值:
式中:N2为悬浮绕组每相串联有效匝数;I2为悬浮绕组电流幅值。
令悬浮绕组水平方向α绕组电流为iα=I2cosθ,则悬浮绕组电流的磁动势基波:
假定电机转子磁动势为fr,则电机悬浮绕组产生的气隙磁通密度:
因气隙磁通密度沿转子圆周的总和为零,故下式成立:
计算式(6),可得转子偏离中心时转子磁动势:
将式(2)、式(4)、式(5)和式(7)代入式(8),进行积分、化简,并忽略其中的较小项,同时令电机转子y方向悬浮绕组β的电流为iβ=I2sinθ,可得下式:
悬浮绕组α1,α2的自感可线性表示:
假定电机悬浮绕组β由两个相同的绕组β1,β2串联而成,依据式(9),同理可求得绕组β1,β2的自感:
由式(10)、式(11)可看出,在转子偏心状况下,忽略电机磁饱和影响,悬浮绕组电感与转子位移成线性关系。
2.2 转子位移信号提取原理
假定电机悬浮绕组α1,α2两端分别并接相同的端接电阻R,绕组α1,α2两端的电压分别为Vα1,Vα2,悬浮绕组α1,α2的连接点和两个电阻连接点之间的电压定义为差分电压Vdα,依据式(10)、式(11)可得Vdα:

假定绕组β两端的电压为Vβ,绕组β1,β2的两端电压为Vβ1,Vβ2,可得电机悬浮绕组α,β的端电压分别为:
我无法想象到他是怎样一个接一个的创作出作品的。但我确信,他通过不断地创作,来表达他不同的人格理念、自由多变的塑造方式。我是这么理解的,他每天创作都是完全不相同的,这也体现了熔铜的特性。同类的作品不同的创作理念,同样的创作手法不同的文化风格,创作出来的作品都是不一样的,创作过程中它们的形态也是独立的。对我们这个时代来说,收藏品改变了对文化的印象,他用他的熔铜的方式呈现了,中国传统文化迷人的包容性特点,关于朱炳仁与西方的奇观:他满足了我们对其他文化新发展的渴望。
依据式(10)、式(11)、式(12)和式(13),可得悬浮绕组α1,α2之间的差分电压Vdα:
设注入悬浮绕组的高频电压信号幅值为Vi,角频率为ωi,则注入的高频电压信号Vinj可表示:
则相应的悬浮绕组高频差分电压与转子径向位移之间的关系为:
通过电压传感器可获得式(16)中的高频差分电压。
将式(16)分别乘以cos(ωit)和sin(ωit),可得到下式:
将上述解调后的信号滤除其中的高频分量,得到下式中的直流分量:
由式(18)可知,通过提取悬浮绕组两端的直流差分电压信号,结合悬浮绕组注入下的高频电压幅值,可实现电机的无位移传感器控制,从而省略了机械位移传感器。图3为高频信号注入下的电机转子径向位移检测原理。

图3 转子位移信号检测原理
3 电机无位移传感器控制系统
在两相静止α-β坐标系下,转子所受悬浮力Fα,Fβ与悬浮绕组基波电流iα2,iβ2的关系[8]:
式中:Kd,Kq分别为同步旋转坐标下d,q轴悬浮力和电流常数,根据样机参数,经估算Kd=61N/A,Kq=28N/A;id,iq为转矩绕组d,q轴电流。
忽略其他次要因素,转子所受悬浮力与径向位移α,β之间的运动方程:
式中:mg为转子重量。
无轴承同步磁阻电机转矩控制采用恒定励磁分量电流控制,在两相旋转d-q坐标系下,无轴承同步磁阻电机转矩方程[9]:
式中:Te为电磁转矩;p1为转矩绕组极对数;Ld,Lq为转矩绕组d,q轴电感。
图4给出了电机无位移传感器整体控制系统,注入电机的高频电压信号是由悬浮绕组PWM逆变器产生。图中转子位移给定值与估计值的偏差经PD调节生成悬浮力给定值,经式(19)中的力/电流调节产生电流参考值,滞环电流PWM逆变器提供实际所需电流,实现转子位移准确估计。

图4 高频信号法控制系统框图
4 仿真及分析
采用本文方法进行仿真研究,进一步验证该方法的可行性。为避免注入的高频电压信号对悬浮力和转速调节产生影响,高频信号的频率和幅值必须限制在一定范围内,此处高频信号的频率选取2kHz,幅值选取基波电压的0.1倍。样机参数如表1所示,仿真结果如图5~图10所示。
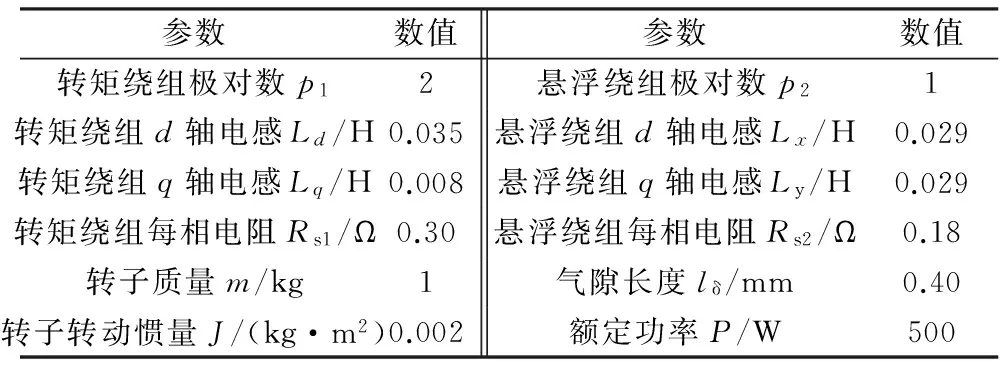
表1 样机参数
图5为电机起浮动态过程中转子两轴方向位移运动轨迹,转子位移初始值分别为α=-0.15mm,β=-0.19mm,可以看出,转子以内螺旋方式稳定悬浮于中心位置。此时转子α方向上所受悬浮力Fα响应曲线如图6所示。

图5 转子运动轨迹

图6 悬浮力Fα曲线
图7为被控电机分别采用无位移传感器和实际位移直接检测时α位移对比曲线,位移初始值皆为α=-0.15mm,目标值均设定为α=0。由图7可知,与实际传感器检测法相比,采用高频信号法的转子位移波动要大,但很快能趋于目标位置,转子位移波动幅度在气隙0.4mm允许范围内。
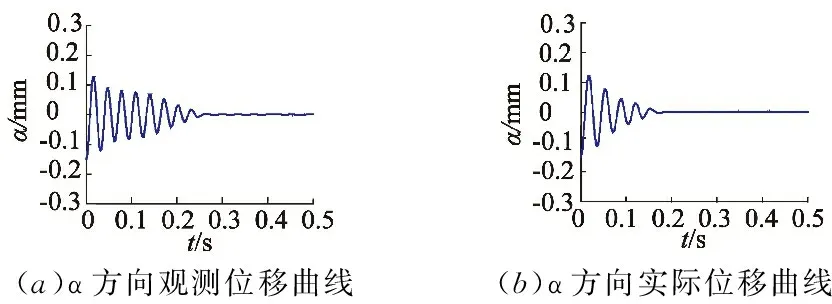
(a)α方向观测位移曲线(b)α方向实际位移曲线
图7 有无位移传感器下α方向位移对比曲线
图8为有无位移传感器下β轴位移对比曲线,β轴位移初始位置皆为β=-0.19mm,目标值均为β=0。可以看出,无位移传感器下转子位移动态调节性能良好,与有传感器相比有一定的误差,但仍具有较高的观测辨识度。
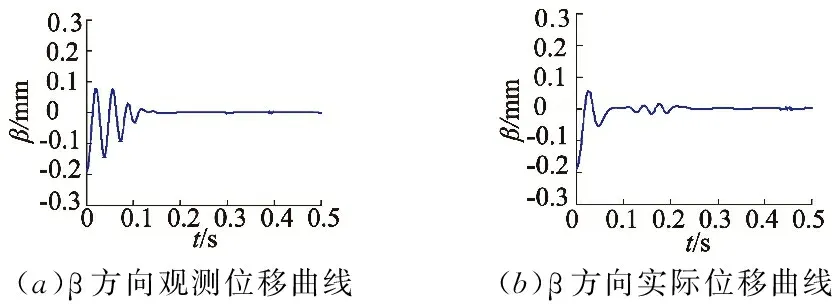
(a)β方向观测位移曲线(b)β方向实际位移曲线
图8 有无位移传感器下β方向位移对比曲线
图9和图10分别为电机转速和转矩响应曲线。转速初始目标值为n=1 500r/min,0.33s后转速设定为1 000r/min,转速静态误差较小。电机空载起动,0.4s后转矩设定为T=5N·m,转矩控制性能较好。可以看出,转速和转矩的动态响应并未对两轴方向上的转子位移产生影响,电机的整体控制性能良好。

图9 转速响应曲线
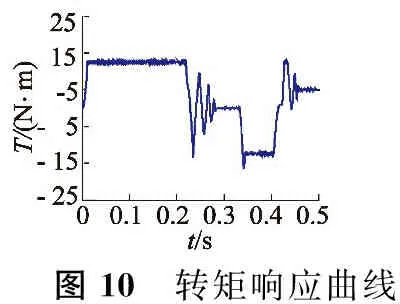
图10 转矩响应曲线
5 结 语
无轴承同步磁阻电机由于装配机械式电涡流位移传感器会带来诸多缺点:电机结构不坚固、成本增加等,提出了电机悬浮绕组高频信号注入下的转子径向位移检测方法。给出了电机悬浮绕组互感与转子位移的线性关系,通过在悬浮绕组端注入小幅值高频电压信号,将检测到的悬浮绕组差分电压进行信号解调,可在电机转速和转矩动态调节过程中实现转子径向位移的准确观测。仿真证实,悬浮绕组高频信号法能准确跟踪转子位置,电机悬浮运行和调速性能良好。
[1]KUWAJIMAT,NOBET,EBARAK,etal.Anestimationoftherotordisplacementsofbearinglessmotorsbasedonahighfrequencyequivalentcircuit[C]//2001IEEEInternationalConferenceonPowerElectronicsandDriveSystems.IEEE,2001:725-731.
[2] 柏仓,黄守道,管晓文,等无轴承永磁同步电机无位移传感器系统建模与仿真[J].电气传动,2009,39(9):60-63.
[3] 张汉年,孙刚,刘合祥.基于改进电压模型的无轴承同步磁阻电机转子位移估计方法[J].电气传动,2012,42(3):52-56.
[4]ZHUXiangzhen,POLLOCKC.Newdesignofradialdisplacementsensorforcontrolofaswitchedreluctancemotorwithoutbearings[C]//2005IEEEIndustryApplicationsSociety.IEEE,2005:2160-2167.
[5] 张汉年,孙刚,刘合祥.无轴承同步磁阻电机高频信号注入法无位移传感器控制[J].微电机,2012,45(1):67-70.
[6] 周令康,冯冬梅,刁小燕,等.基于高频注入法的无轴承同步磁阻电动机径向位移自检测技术[J].微特电机,2013,41(2):17-20.
[7] 年珩,贺益康.永磁型无轴承电机无径向位移传感器运行研究[J].电工电能新技术,2006,25(4):16-18.
[8]HERTELL,HOFMANNW.Magneticcouplingsinabearinglessreluctancemachine[C]//InternationalConferenceonElectricalMachines.IEEE,2000:1776-1780.
[9]BOSEBK.现代电力电子学与交流传动[M].北京:机械工业出版社,2006.
A Method of the Rotor Displacements Detection for Bearingless Synchronous Reluctance Motor Based on High Frequency Signal Injection
ZHANGHan-nian1,BAOAn-ping1,DuanXiang-jun1,ZHANGTao2
(1.Nanjing College of Information Technology,Nanjing 210023,China;2.Huaiyin Institute of Technology,Huaian 223003,China)
The bearingless synchronous reluctance motor (BSRM) requires displacement sensors inside the motor to detect the rotor displacements,a new control method to observe the rotor displacement is needed to reduce the complex structure and a long shaft length for the BSRM. The linear relation between the suspension winding inductance and the rotor displacement was analyzed,then using high frequency signal injection in the suspension winding,then the differential voltage was detected,through signal processing,the rotor displacements were extracted from the differential voltage,the accurate observation of the rotor displacements for the BSRM was realized. Simulation results confirm that the proposed method has higher detection accuracy and can achieve stable suspension operation.
high frequency signal injection;bearingless synchronous reluctance motor;differential voltage;rotor displacements detection
2016-08-11
江苏省高校“青蓝工程”项目(2014-23);江苏省“333工程”科研资助项目(2015-22);江苏省高校自然科学研究面上项目(16KJB470019)
TM352
A
1004-7018(2017)03-0026-05
张汉年(1975-),男,硕士,副教授,研究方向为电机控制与电力电子技术。
猜你喜欢
数学杂志(2022年5期)2022-12-02
大电机技术(2022年5期)2022-11-17
防爆电机(2021年4期)2021-07-28
新世纪智能(数学备考)(2021年5期)2021-07-28
时代人物(2019年29期)2019-11-25
应用能源技术(2019年1期)2019-01-30
电子制作(2018年19期)2018-11-14
电子制作(2017年1期)2017-05-17
照明工程学报(2016年3期)2016-06-01
云南电力技术(2015年2期)2015-08-23
