
基于扰动观测器与最小二乘法惯量辨识的永磁同步电机控制
2017-04-12 02:59丁远扬
电机与控制应用 2017年3期
丁远扬, 孙 鑫
(上海大学 机电工程与自动化学院,上海 200072)
基于扰动观测器与最小二乘法惯量辨识的永磁同步电机控制
丁远扬, 孙 鑫
(上海大学 机电工程与自动化学院,上海 200072)
将扰动观测器(DOB)用于永磁同步电机(PMSM)的控制能够有效抑制外部力矩扰动,但由于PMSM参数存在时变和不确定性,导致DOB的控制品质下降。提出采用递推加权最小二乘法对变化后的转动惯量进行辨识,将修正后的转动惯量用于DOB。仿真试验表明,该方法能够高精度地对转动惯量进行实时在线辨识,提高了电机在变负载情况下的抗外部力矩扰动的能力。
永磁同步电机; 扰动观测器; 最小二乘; 惯量辨识
0 引 言
现今各行各业对伺服电机的控制精度提出了越来越高的要求,以用于数控机床、机器人等的高品质控制。影响伺服控制系统控制品质的扰动主要有两种:设定值扰动与外部扰动。伺服控制系统的控制器通常主要用于解决设定值扰动,最终使得系统输出能够又快又准地跟随设定值的变化;但实际系统中,负载突变、静摩擦及库伦摩擦干扰等外部扰动,往往不可避免,通常是利用反馈环节与前馈控制对其进行有限的抑制。文献[1-2]利用鲁棒控制使得系统在外部扰动的作用下保持稳定,但一般鲁棒控制系统并不工作在最优状态,是以牺牲系统的性能来确保系统稳定性的。
文献[1-2]都采用的是一种相对被动的方法抑制外部扰动。日本学者大西公平(K.Ohnishi)提出了扰动观测器(Disturbance Observer,DOB)的概念[3],通过一种相对主动的方法对外部扰动进行估计,并将估计值实时补偿到系统以抵消外部扰动。该方法因其简单有效而得到了许多学者的关注,如文献[4]提出了基于H∞范数优化的DOB Q滤波器设计,文献[5]证明了最小相位是DOB稳定的必要条件,文献[6]提出了适用于PID控制下的非最小相位对象的DOB结构。
DOB利用控制量、被控量与被控对象的标称模型来对外部扰动进行估计,因此被控对象标称模型的精确度将极大地影响DOB的补偿精度。在交流电机实际应用中,负载转矩突变或者机械参数(主要指转动惯量)变化会对系统期望的性能造成明显的不良影响。针对上述问题,如果能够通过系统辨识方法得到精度更高的被控对象模型或者部分模型,获得更加接近于实际对象的模型,将提高DOB估计扰动的能力,能够使得系统的控制性能更加突出。文献[7]利用朗道离散递推算法辨识伺服系统中转动惯量,但是该算法只能用于开环系统的辨识,无法进行高精度的在线实时惯量辨识。
本文提出一种基于递推加权最小二乘法(Recursive Least Square,RLS)的惯量辨识与DOB相结合的伺服控制方法。该方法使用RLS进行在线实时惯量辨识,并将辨识所得惯量参数用于DOB。通过仿真计算,验证了所提方法能够提高系统的标称模型精度,以及DOB对外部扰动估计的精度,从而提高了系统的抗外部扰动的性能。
1 永磁同步电机数学模型
文献[8]给出了面贴式永磁同步电机(Permanent Magnet Synchronous Motor,PMSM)调速系统框图,如图1所示。该系统采用SVPWM方式进行控制。采用id=0控制,Ld=Lq=L,则dq同步旋转坐标系下的PMSM解耦模型为
(1)
(2)
式中:R、L——定子绕组电阻与电感;
J——转动惯量;
B——摩擦因数。
考虑时延与死区的SVPWM电压源逆变器传递函数为
(3)
式中:Ts——逆变器的控制周期;
Td——延迟时间。
图1中Ke为反电动势常数,Kt为转矩常数,TL为负载转矩。
速度环中的主控制器采用PI控制:
(4)
电流环中的副控制器也采用PI控制:
(5)
式中:kp1、kp2——比例增益系数;
ki1、ki2——积分增益系数。

图1 PMSM的SVPWM控制框图
2 DOB的设计
2.1 DOB原理
PMSM调速系统一般包括两个闭环:电流环(内环)和速度环(外环)。速度环的输出量对调速系统极为重要,一般对速度环的要求是跟踪给定速度的过渡时间短、超调量小,稳态后速度波动小、跟踪精度高;在外部环境改变或系统突加负载的情况下,速度降落少,恢复时间短。此外,由于对电机输出速度有重要影响的力矩扰动在电流环外面,所以电流环控制器对其没有直接的补偿作用。基于上述考虑,将DOB用于速度环控制,以提高抗转矩扰动的能力。


图2 DOB原理图

2.2 调速系统DOB设计
在PMSM调速系统中,负载转矩TL为主要外部扰动,因此设计DOB对其进行观测并进行补偿。基于DOB的PMSM控制框图如图4所示。
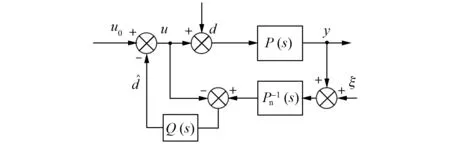
图3 改进的DOB结构图
由于逆变器的控制周期Ts与延迟时间Td均十分小,可将电流环简化等效为1。若忽略反电动势常数Ke,则可将基于DOB的PMSM SVPWM控制框图简化为图5所示。对图5进行方框图变换后得到图6,图6将转矩扰动TL变为等效电流扰动iL,可得到等效扰动观测值为
(6)
其中:
(7)
(8)
低通滤波器Q(s)采用一阶低通的形式,时间常数τ取采样周期Ts的10倍[7]。

图4 基于DOB的PMSM SVPWM控制框图

图5 简化的基于DOB的PMSM SVPWM控制框图

图6 经变换的基于DOB的PMSM SVPWM控制框图
3 DOB参数辨识
由于DOB对负载扰动TL的观测为在线实时进行,因此对转动惯量的辨识也必须是在线实时进行。本文运用RLS对系统参数进行在线估计,该方法具有计算量小、辨识精度高等特点。
RLS的递推算法为
(9)
(10)
(11)
式中:λ——遗忘因子;
z(m+1)——当前时刻的测量值;
h(m+1)——对象输入输出量的历史信息;


Km+1——增益修正矩阵。
基于RLS与DOB的PMSM SVPWM控制框图如图7所示。递推加权最小二乘模块以电流环的反馈值iq与转速反馈值ω作为输入信号来对转动惯量J进行辨识。
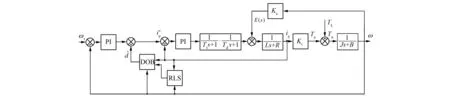
图7 基于RLS与DOB的PMSM SVPWM控制框图
待辨识对象模型为
(12)
对Pn(s)进行Z变换后得到对象模型的离散形式:
(13)
(14)
历史信息矩阵h(m+1),由m时刻的电流环的反馈值iq与转速反馈值ω组成。
(15)
4 仿真分析
4.1 系统描述
图7中PMSM控制框图的参数取值如表1所示。

表1 PMSM控制系统参数表
DOB的输出值为
(16)
若式(16)中的转动惯量J与摩擦因数B无法测得,则取电机空载时的标称值作为DOB的参数,此时得到扰动观测值为
(17)
4.2 结果分析
对PMSM系统采取双环PI控制,在不包含DOB与包含DOB的两种情况下施加外部力矩,进行抗扰动试验。在500 r/min的转速下突加75 N·m外部力矩,转速响应曲线如图8所示。点状线为不包含DOB的速度响应曲线,在施加外部力矩后,转速下降至498.2 r/min,并无法回升至500 r/min的转速设定值,转速控制有余差。图8中虚线为包含DOB的转速控制系统,在施加外部力矩后,转速下降至498.75 r/min,经过0.005 s后回升并稳定在设定值500 r/min。PMSM转速控制系统引入DOB能够有效提升抗外部力矩扰动的能力。

图8 转速控制响应曲线图
由式(16)可知,DOB的观测精度取决于两个参数:转动惯量J和摩擦因数B。若电机不为空载,则此时实际转动惯量与电机的标称值不同,DOB的精度也会受到较大影响。电机空载时的转动惯量为0.025 2 kg·m2,若将实际转动惯量增大至0.1 kg·m2,而此时DOB的参数J仍然取0.025 2 kg·m2,在外部力矩扰动下,转速响应曲线如图8点划线所示。此时转速下降至499.28 r/min,后又超速至500.14 r/min,经过了0.011 s后才稳定在设定值500 r/min。因此实际转动惯量增大后,抗外部力矩扰动所需的时间更长,且转速波动更大。
运用RLS能够有效的对转动惯量进行在线辨识。当电机实际转动惯量发生变化时,经过辨识的转动惯量将被引入到DOB的参数之中。在突加外部力矩扰动时,速度响应曲线如图8实线所示,转速下降至499.54 r/min,经过0.009 s后回升并稳定在设定值500 r/min。加入参数辨识的DOB具有更加好的性能,相较于无直接采用标称值的DOB,抗外部力矩扰动所需调整时间更短,转速波动更小。
采用RLS辨识转动惯量的过程如图9所示。转动惯量的初值设为电机空载时的标称值,在电机从禁止升速至额定转速的过程中,RLS模块根据测得的q轴电流iq与当前转速ω,由式(9)~式(13),可在每个控制周期计算出转动惯量并逐步逼近实际值。如图9所示,当电机起动0.009 s时,RLS辨识的转动惯量为0.101 2 kg·m2,十分接近实际值0.1 kg·m2。

图9 基于RLS的转动惯量辨识

图10 外部力矩补偿曲线
在施加外部力矩后,RLS配合DOB进行力矩补偿,如图10所示。点状线为电机空载时DOB所补偿的力矩,虚线为增大转动惯量后DOB所补偿的力矩。由图10可见,增大转动惯量后,力矩补偿时的波动更大,所需的稳定时间更长。实线为增大转动惯量后采用RLS配合DOB进行的力矩补偿,可见对转动惯量进行参数辨识后,力矩补偿更快、更稳定。
5 结 语
针对PMSM参数存在时变和不确定性,DOB的控制品质下降问题,本文提出了将基于最小二乘惯量辨识的DOB用于PMSM的控制。本文对PMSM SVPWM控制框图进行了简化与方框图变换,并以此系统设计了DOB。在双闭环PI调速系统中,DOB能有效抑制外部力矩扰动对电机转速的影响。当转动惯量出现变化时,采用标称参数设计的DOB出现性能下降。本文对变换后的基于DOB的PMSM SVPWM系统进行了参数辨识,采用RLS对变化后的转动惯量进行辨识,将修正后的转动惯量用于DOB。仿真试验表明,该方法能够高精度地对转动惯量进行实时在线辨识,具有计算量较小,能够提高电机在变负载情况下的抗外部力矩扰动能力等优点。
[1] 杨书生,钟宜生.永磁同步电机转速伺服系统鲁棒控制器设计[J].中国电机工程学报,2009,29(3): 84-90.
[2] YING L, CHEN Y Q, HYO A, et al.Fractional order robust control for cogging effect compensation in PMSM position servo systems: stability analysis and experiments[J].Control Engineering Practice, 2010, 18(9): 1022-1103.
[3] OHNISHI K.A new servo method in mechatronics[J].Transactions of Japanese Society of Electrical ENG, 1987(1): 83-86.
[4] SU J, WANG L, YUN J.A design of disturbance observer in standard H ∞ control framework: design of disturbance observer inframework[J].International Journal of Robust and Nonlinear CONT, 2014, 25(16): 2894-2910.
[5] HYUNGBO S H, YOUNG.State space analysis of disturbance observer and a robust stability condition[J].Decision and Control, 2007: 2193-2198.
[6] SON Y I, HYUNGBO S, JO N H, et al.Design of disturbance observer for non-minimum phase systems using PID controllers[C]∥ Proceedings of Sice Annual Conference, Vols 1-8.345 E 47TH ST, New York, NY 1001: IEEE, 2007: 196-201.
[7] 潘书娜,李世华,陈夕松.永磁同步电机调速系统的自适应复合控制算法[C]∥ 2009年中国智能自动化会议,2009: 5.
[8] 王莉娜,朱鸿悦,杨宗军.永磁同步电动机调速系统PI控制器参数整定方法[J].电工技术学报,2014,29(5): 104-117.
Permanent Magnet Synchronous Motor Control Based on Disturbance Observer and Inertia Identification with Least Square
DINGYuanyang,SUNXin
(School of Mechatronic Engineering and Automation, Shanghai University, Shanghai 200072, China)
The disturbance observer for permanent magnet synchronous motor (PMSM) can effectively restrain the external torque disturbance.Since the parameters of PMSM are time-varying and uncertainty, the performance of disturbance observer declines.A recursive weighted least squares estimation was used to identify the moment of inertia after change.The corrected moment of inertia was used to the disturbance observer.The simulation results showed that this method could precisely identify the moment of inertia online.The method improved the ability of motor to restrain external torque disturbance when the load change.
permanent magnet synchronous motor (PMSM); disturbance observer (DOB); least square; inertia identification
丁远扬(1992—),男,硕士研究生,研究方向为检测与控制。
TM 301.2
A
1673-6540(2017)03- 0040- 06
2016 -08 -31
猜你喜欢
现代电力(2022年2期)2022-05-23
高师理科学刊(2020年2期)2020-11-26
四川工商学院学术新视野(2020年2期)2020-08-13
汽车维修技师(2019年7期)2020-01-16
汽车维修技师(2018年11期)2018-05-11
中国惯性技术学报(2018年1期)2018-05-10
重庆理工大学学报(自然科学)(2017年5期)2017-06-29
中学生数理化·高一版(2017年1期)2017-04-25
中北大学学报(自然科学版)(2015年6期)2015-12-02
新高考·高一物理(2014年4期)2014-09-17
