
永磁同步电机多传感器组合全闭环矢量控制方法*
2017-04-12 02:59赵德堂魏海峰
电机与控制应用 2017年3期
赵德堂, 张 懿, 魏海峰
(江苏科技大学 电子信息学院,江苏 镇江 212003)
永磁同步电机多传感器组合全闭环矢量控制方法*
赵德堂, 张 懿, 魏海峰
(江苏科技大学 电子信息学院,江苏 镇江 212003)
交流伺服电机广泛应用于机器人控制、数控机床等对调速系统性能要求很高的领域。在高性能数控机床、机器人等领域应用的交流伺服电机几乎都需要配置光电编码器等位置反馈元件,其控制多采用矢量控制的方式。但是由于系统误差和运行过程中的机械变形和装配原因,电机控制性能往往难以满足要求。为此,提出一种永磁同步电机(PMSM)多传感器组合全闭环矢量控制方法,并且重点比较了PMSM传统矢量控制方法和PMSM多传感器组合全闭环矢量控制方法。通过分析比较,试验结果展现出PMSM多传感器组合全闭环矢量控制方法可以很好地提高伺服系统的动态、稳态精度。
永磁同步电机; 多传感器组合; 全闭环矢量控制
0 引 言
交流伺服电机广泛应用于机器人控制、数控机床等对调速系统性能要求很高的领域。在高性能数控机床、机器人等领域应用的交流伺服电机几乎都需要配置光电编码器等位置反馈元件,其控制多采用矢量控制的方式。通过矢量控制的方法可以将交流伺服电机建模成励磁绕组和电枢绕组与转子同步旋转的直流电机,从而将直流调速系统的理论应用到永磁同步交流伺服电机的控制中,进而获得高性能的控制效果[1-3]。
在永磁同步电机(Permanent Magnet Synchronous Motor,PMSM)的转子磁极定向矢量控制中,PMSM的动态性、控制精度、低速性对伺服系统具有重要的影响。目前,传统的三闭环PMSM转子磁极定向矢量控制方法利用电流传感器检测PMSM的三相电流,经过Clark变换与Park变换,得到旋转坐标系(dq坐标系)上的等效电流id、iq,然后经过给定量与反馈量通过调节器和反Park变换,最后再经过SVPWM算法实现对PMSM的控制,同时在PMSM的输出轴上装有绝对编码器来实现对PMSM的速度和位置反馈。但是由于系统误差和运行过程中的机械变形和装配原因,电机控制性能往往难以满足要求。因此,如何更好地提高电机的控制性能,是现有技术有待解决的问题。针对这些问题,本文提出一种PMSM多传感器组合使用的全闭环矢量控制方法,此方法可以很好地提高电机的控制性能[2]。
1 与PMSM传统矢量控制比较
PMSM传统矢量控制系统中,通常采用电流传感器、霍尔传感器和绝对编码器,如图1所示。其中电流传感器实现电流负反馈,霍尔传感器实现PMSM转子初始位置检测,绝对编码器安装在电机上,用来实现电机的速度和位置反馈。

图1 PMSM传统矢量控制框图
PMSM多传感器组合全闭环矢量控制系统与传统的PMSM矢量控制系统的区别主要在于霍尔传感器、增量式编码器和绝对式编码器的组合使用以及其安装位置的不同。PMSM多传感器组合使用全闭环矢量控制系统采用电流传感器、霍尔传感器、相对编码器和绝对编码器,如图2所示。其中电流传感器实现电流负反馈,霍尔传感器实现PMSM转子初始位置的粗测,判断出转子磁极的电角度区间,相对编码器装在电机上,主要是对电机的速度进行检测,实现对电机速度的闭环控制;同时根据霍尔传感器获得的转子磁极的电角度区间进行转子磁极位置的精测。霍尔传感器和增量式编码器结合使用有利于加快对转子磁极位置的搜索过程,并减小摆动范围,具有较佳的起动性能。在谐波减速器的输出轴上(负载端)装有高精度的绝对编码器实现对电机的位置控制(后端反馈),可以减少装配问题,以及在电机运行中由于机械变形对控制精度的影响,从而提高电机的控制性能。
2 PMSM多传感器组合全闭环矢量控制方案
PMSM多传感器组合全闭环矢量控制方法,包括以下步骤:
(1) 通过负载端的绝对编码器获得电机转子当前所在绝对编码器的机械位置;

图2 PMSM多传感器组合使用全闭环矢量控制框图
(2) 根据设定电机转子要到达绝对编码器的机械位置和电机转子当前所在绝对编码器的机械位置,进行位置环PI计算,获得电机的设定速度值;
(3) 通过电机输出轴端的霍尔传感器和增量式编码器获得当前转速和当前转子磁极位置;
(4) 根据设定电机转速和当前电机转速,进行速度环PI计算,获得旋转坐标系交轴设定电流值;
(5) 通过电流传感器获得PMSM的当前三相电流值ia、ib、ic;
(6) 将所测得当前三相电流ia、ib、ic经过Clark和Park变换得到旋转坐标系下的直轴电流id和交轴电流iq;
(7) 分别获得当前旋转坐标系的直轴电流与旋转坐标系下的直轴电流设定值之间的差值,以及当前旋转坐标系的交轴电流与旋转坐标系下的交轴电流值之间的差值,并将两个差值输入电流环,经过电流环PI计算,获得旋转坐标系下的直轴电压ud和交轴电压uq;
(8) 将旋转坐标系下的直轴电压ud、交轴电压uq经过反Park变换得到两相静止坐标系上的正交电压值uα、uβ,将获得的正交电压值uα和uβ经过反Clark变换获得PMSM三相设定值;
(9) 经过SVPWM算法控制三相全桥逆变器的导通来实现对PMSM的控制。
本伺服系统通过多传感器组合使用,并运用转子磁极矢量控制方法实现对PMSM的控制,如图3所示。在未知转子初始位置情况下,直接起动PMSM,会出现电机无法起动、不能带重载起动,或者起动过程中会产生过流和抖动等所不期望的现象。如果随意选择磁场角度θ作为初始值进行控制可能导致电机的力矩非常小或者为零,还有可能使电机按照相反的方向转动,这在某些场合会导致严重的后果。因此,为了更好地控制PMSM,应该确定转子的初始位置后再起动,同时在伺服系统中由于装配问题和电机在运行过程中由于机械变形,往往导致电机的控制性能不理想[4-5]。

图3 一种PMSM多传感器组合全闭环矢量控制方法流程图
矢量控制永磁同步交流伺服电机初始磁极位置搜索流程图,如图4所示。首先通过霍尔位置传感器进行位置粗测[6]。矢量控制中关心的是初始电角度,根据HU、HW、HV的排列确定每60°电角度一个区间。具体使用时,通过I/O端口一次读入3个信号,根据其排列可确定当前所在电角度的区间。再采用二分法对磁极位置进行精确搜索[7]。选择适当的电压/电流向量激励电机,使转子产生微动;采用增量式编码器测量微动的增量;获得转子相对于定子的绝对位置关系。
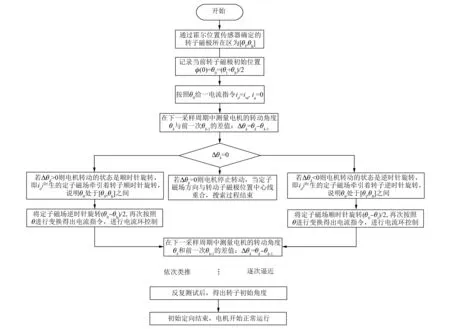
图4 矢量控制永磁同步交流伺服电机初始磁极位置搜索流程图

图5 控制框图
3 试验平台
PMSM多传感器组合使用全闭环矢量控制驱动模块框图如图5所示。
由图5可知驱动模块主要由电源转换电路、CAN驱动电路、USB-RS232转换电路、RS232-TTL驱动电路、RS422-TTL驱动电路、三相全桥逆变电路、三相电流检测电路等功能电路组成。电源变换电路主要实现DC-DC电源变换,实现+12、+10、+5、+3.3、+1.5 V电源输出,满足驱动模块中各个功能芯片不同电压等级的供电要求。驱动电路主要采用TJA1040T实现驱动模块与其他CAN网络之间的接入。USB-RS232转换电路主要采用FT232R来实现驱动控制程序的烧写与在线参数调节。RS232-TTL驱动电路实现主控芯片TTL电平与RS232接口转换。RS422-TTL驱动电路实现主控芯片TTL电平与RS422接口转换,实现驱动模块与绝对值码盘DS70的信息通信。三相全桥逆变电路是将直流电压信号逆变成交流信号,通过芯片产生的PWM波控制开通和关断来实现对交流电机的驱动控制。三相电流检测电路是检测逆变后的交流电流信号强弱,用于电机参数的自适应调节和过流保护。
4 试验结果及分析
PMSM反电势曲线如图6所示,是平滑的正弦波。图7、图8分别为PMSM传统矢量控制从绝对码盘值0 qc处走到绝对码盘的1 000 qc处运动轨迹曲线和PMSM多传感器组合使用全闭环矢量控制从绝对码盘值0 qc处走到绝对码盘的1 000 qc处运动轨迹。通过两者运动轨迹曲线可知,PMSM多传感器组合使用全闭环矢量控制有更好的快速性和控制精度。

图6 永磁同步电机反电动势波形图
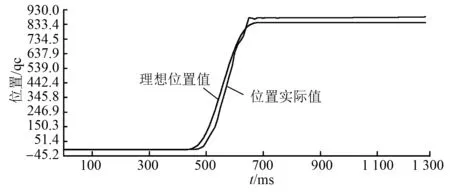
图7 PMSM传统矢量控制运动轨迹曲线
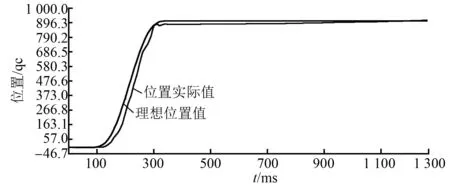
图8 PMSM多传感器组合使用全闭环矢量控制运动轨迹曲线
5 结 语
本文详细介绍一种PMSM多传感器组合全闭环矢量控制方法及其应用优势。搭建了PMSM多传感器组合全闭环矢量控制试验平台,并且重点比较了PMSM传统矢量控制方法与PMSM多传感器组合全闭环矢量控制方法。通过分析比较,试验结果展现出PMSM多传感器组合全闭环矢量控制方法可以很好地提高伺服系统的动态、稳态精度。
[1] 叶伟,张晓光,孙力.基于线性霍尔传感器的高速永磁同步电机控制系统设计[J].伺服控制,2010(3): 41-44.
[2] 李坚.基于DSP的三闭环交流永磁同步电机伺服系统设计与实现[D].西安: 电子科技大学,2012.
[3] 陈伯时.电力拖动自动控制系统[M].北京: 机械工业出版社,2000.
[4] 王萌,杨家强,张翔,等.一种表贴式永磁同步电机电流矢量闭环I/f控制方法[J].中国电机工程学报,2015,35(10): 2513-2521.
[5] 杨立永,陈为奇.永磁同步电机转子初始位置检测研究[D].北京: 北方工业大学,2012.
[6] 徐永向,邹继明,赵猛,等.基于单霍尔传感器的PMSM位置检测方法[J].哈尔滨工业大学学报,2008,40(11): 1769-1772.
[7] 王高林,杨荣峰,于泳,等.内置式永磁同步电机转子初始位置估计方法[J].电机与控制学报,2010,14(6): 56-60.
引领技术发展趋势 报道经典实用案例 反映行业最新动态
Multi-Sensor Combination Full Closed-Loop Vector Control Method of Permanent Magnet Synchronous Motor*
ZHAODetang1,ZHANGYi1,WEIHaifeng1
(School of Electrical and Information, Jiangsu University of Science and Technology,Zhenjiang 212003, China)
AC servo motor was widely used in robot control, numerical control machine tools for high speed control system performance requirements, the high performance CNC machine, robot in areas such as almost all of the application of ac servo motor need to configure the position feedback components such as photoelectric encoder, its control method with the method of vector control.But because the system error and cause mechanical deformation and assembly in the process of operation, and motor control performance was often difficult to meet the requirements.A kind of permanent magnet synchronous motor multi-sensor combination full closed-loop vector control method was put forward and analyzed.And focusing on the traditional permanent magnet synchronous motor vector control method and the permanent magnet synchronous motor multi-sensor combination full closed-loop vector control method.Through analysis and comparison of the experimental results showed a multi-sensor combination full closed-loop vector control method could well improve the servo system of dynamic and steady-state accuracy.
permanent magnet synchronous motor (PMSM); multi-sensor combination; full closed-loop vector control
国家自然科学基金项目(61503161);江苏省产学研前瞻性联合研究项目(BY2016073-01);江苏省普通高校专业学位研究生实践创新计划项目(YSJ15S-09)
赵德堂(1990—),男,硕士研究生,研究方向为电机控制。 张 懿(1982—),女,博士研究生,副教授,研究方向为电机控制。 魏海峰(1981—),男,博士研究生,副教授,研究方向为电机控制。
TM 301.2
A
1673-6540(2017)03- 0006- 05
2016 -07 -27
猜你喜欢
防爆电机(2020年6期)2020-12-14
成都信息工程大学学报(2018年3期)2018-08-29
黑龙江电力(2017年1期)2017-05-17
电子设计工程(2017年20期)2017-02-10
环境科技(2016年5期)2016-11-10
光学精密工程(2016年3期)2016-11-07
电子器件(2015年5期)2015-12-29
系统工程学报(2015年2期)2015-02-28
电网与清洁能源(2015年2期)2015-02-28
大电机技术(2015年5期)2015-02-27
