
全回转推进器多偏转角工况水动力性能研究
2017-04-10 05:53张文璨董国祥陈伟民
上海船舶运输科学研究所学报 2017年1期
张文璨, 董国祥, 陈伟民
(上海船舶运输科学研究所 航运技术与安全国家重点实验室,上海 200135)
全回转推进器多偏转角工况水动力性能研究
张文璨, 董国祥, 陈伟民
(上海船舶运输科学研究所 航运技术与安全国家重点实验室,上海 200135)
对全回转推进器多偏转角数值计算策略进行研究设计,运用计算流体力学软件Fluent对全回转推进器不同偏转角(0°,±5°,±10°)工况下的水动力性能进行数值模拟。为验证该数值模拟方法的可靠性,在某拖曳水池进行与数值模拟相对应的敞水模型试验。通过对比,可知计算值与试验值具有较好的贴合性,数值计算方法较为可靠。根据数值计算和模型试验结果,对多进速、不同偏转角工况下全回转推进器的水动力性能进行分析,总结偏转角及进速系数对水动力性能的影响规律。
全回转推进器;偏转角;水动力性能;数值模拟;模型试验
0 引 言
全回转推进器作为当前船舶推进器领域的研究热点,与传统螺旋桨推进方式比较,具有节省空间、优化布置;改善推进器空泡、水动力性能及船舶航行性能;模块化程度高,便于维护修理;可靠性高,适用性极强等优点。基于以上优点,全回转推进器的应用使得船舶的可靠性、机动性和运行效率等方面大幅提高,其应用领域也从工程船(如拖船、浮动起重船、渡船及挖泥船等)拓展到豪华客船、油船和化学品船等。全回转推进器不仅具有广阔的市场前景,而且具有重要的军事应用价值。因此,其理论研究得到国内外船舶工作者的广泛重视。
欧美各国对全回转推进器的理论研究已开展多年,当前其全回转推进配套技术已相当完善,研发出多种性能优良、能满足工程需要的全回转推进设备,如Azipull全回转推进器、Dolphin“海豚”吊舱推进系统、Mermaid吊舱推进系统和Azipod吊舱推进系统等,这几种推进器在全球客船市场中的份额非常高[1-6]。
我国对全回转推进器的理论研究也较为完备,但与世界先进水平相比仍存在着差距。车霖源等[7]进行吊舱推进器的敞水及自航试验,对吊舱推进器的尺度效应进行研究;叶金铭等[8]基于面元法对拖式吊舱推进器定常及非定常水动力性能进行了数值计算;郭春雨等[9]应用混合面模型,对拖式吊舱推进器水动力性能进行数值计算,对2种不同壁面函数下数值计算的精度及网格数量对吊舱推进器数值模拟精度的影响进行讨论;胡健等[10]将速度势低阶面元法与等压kutta条件相结合建立吊舱推进器定常及非定常水动力性能数值计算方法,并基于方法研究附鳍吊舱推进器的定常水动力性能及伴流对推进器性能的影响;史一鸣等[11]对采用常规推进方式和全回转推进方式的一种单桨运输船模型进行对比试验;刘洪梅等[12]对某起重船模型进行舵操纵和全回转推进操纵2种方式下的操纵性能对比试验。
全回转推进器的数值模拟向来具有较高的难度。
1) 全回转推进器结构复杂,所含部件众多(如螺旋桨、导管、吊舱和导流翼等),各部件间的相对运动及周围流场情况具有相当复杂性。为保证各项水动力系数的数值计算精度,必须对数值计算域的形状尺寸、网格划分方式、湍流模型选取和边界条件设置等计算策略进行深入细致的考虑。
2) 全回转推进器斜流工况数值模拟难度更高,其难点在于采用何种数值计算策略。对此,应设计出一种不同于普通直流工况的适用于任何偏转角工况的数值计算域形状并设定合适的尺寸,在符合模型试验真实情况的前提下保证计算域入口进流及出口尾流的质量守恒;同时,边界条件及求解方法设置等也需特殊考量。
这里主要对斜流工况数值计算策略进行研究,并对全回转推进器多偏转角工况下的敞水水动力性能进行数值模拟;同时,为验证数值计算策略的可靠性及精确性,在上海船舶运输科学研究所拖曳水池中进行全回转推进器多偏转角工况的敞水模型试验,并绘制性能曲线;最后,依据数值模拟与模型试验结果,对全回转推进器多偏角工况下的敞水水动力特性进行分析,选取具有代表性的3个不同进速(0.5 m/s,1.5 m/s,2.5 m/s),对不同偏转角工况下全回转推进器的各项水动力系数进行比较分析,总结不同进速范围内偏转角对全回转推进器水动力性能的影响规律和进速对水动力系数随偏转角变化规律(包括变化趋势、变化剧烈程度)的影响。
1 数值模拟及模型试验研究
1.1 几何模型建立
研究的全回转推进器模型由Ka4-7010螺旋桨、No.19A导管、吊舱包及双导流翼等4部分组成,其中:Ka4-7010螺旋桨的主要参数见表1;No.19A导管的剖面形状见图1。
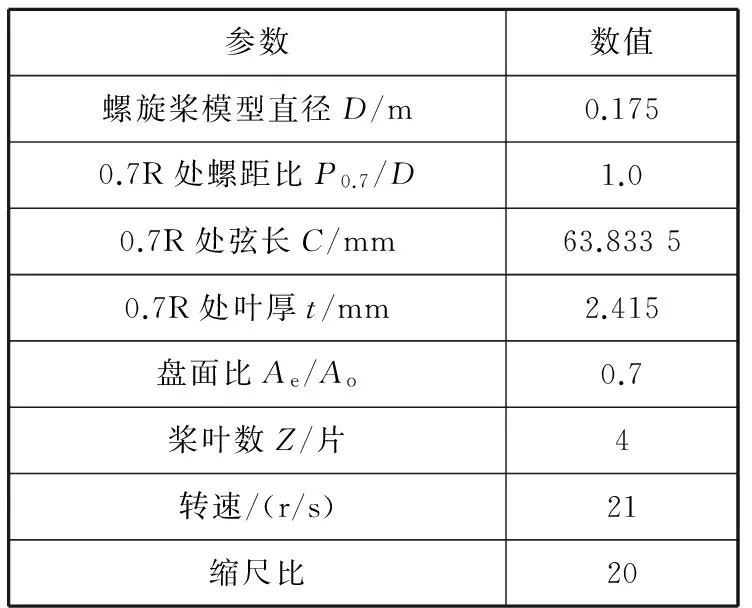
表1 Ka4-7010螺旋桨主要参数
应用计算流体力学前处理软件Gambit,在直角坐标系中建立全回转推进器几何模型见图2。
图2中,全回转推进器模型偏转角度为0°,此时推进器各部件的中轴线与x轴重合。在斜流状态下,推进器绕y轴旋转,此时中轴线在O-xz平面内与x轴成一定角度。偏转角绕y轴按左手法则取为正向。
1.2 数值计算策略
对全回转推进器多偏转角数值计算策略进行研究。
1.2.1 计算域与网格划分
数值计算域分为:螺旋桨旋转域、过渡计算域及外部计算域等3部分,其中:螺旋桨旋转域和过渡计算域由于流场物理量分布变化剧烈,采用非结构化网格划分方法;外部计算域采用结构化网格划分方法。全部计算域及过渡计算域、螺旋桨旋转域网格划分情况见图3和图4。
这里采用的数值计算域形状为圆柱体与长方体的复合体。图3中圆柱体高AC=EG,约为15倍螺旋桨模型直径;圆柱体半径OA=OE,约为20倍螺旋桨模型直径;长方体高与圆柱体高相同,AC=BD=FH=EG,约为15倍螺旋桨模型直径;长BF=HD,约为30倍螺旋桨模型直径;宽AB=CD=EF=GH,约为10倍螺旋桨模型直径。过渡计算域为一直径和高均为2倍螺旋桨模型直径的圆柱体;螺旋桨旋转域形状为类圆柱体,最大直径约为1.003倍螺旋桨模型直径。
全部计算域网格共划分为2 165 680个,偏斜率>0.8的网格单元数为47个,偏斜率>0.97的网格单元数为0,网格质量达到要求。在全部计算域网格中螺旋桨计算域网格划分为758 013个,偏斜率>0.8的网格单元数为41个;过渡计算域网格划分为1 205 636个,偏斜率>0.8的网格单元数为6个;外部计算域网格划分为202 031个,偏斜率>0.8的网格单元数量为0。
1.2.2 边界条件、求解方法设置
计算域的入口边界(即平面BDHF)设置为速度入口“Velocity-inlet”,出口边界(即曲面ACGE)设置为压力出口“Pressure-outlet”;计算域上下底面、平面ACDB及平面EFHG设置为对称面“Symmetry”;全回转推进器各部件(包括螺旋桨、导管、吊舱及双导流翼)设置为壁面“wall”,并满足壁面无滑移条件。用入口速度对整个流场进行初始化。湍流强度设置为1%,湍流耗散比设置为1。螺旋桨旋向为右旋,旋转速度为61 r/s。速度耦合方式选为“SIMPLE”,其他项均采用二阶迎风差分格式离散,压力插值方法选择“PRESTO”,湍流模型选择RNGk-ε模型。
1.3 模型试验研究
为验证采取数值计算策略的可靠性及精确性,在上海船舶运输科学研究所拖曳水池中进行全回转推进器多偏转角(0°,±5°,±10°)下的工况敞水模型试验。
1.3.1 试验模型
全回转推进器模型由螺旋桨、导管、吊舱和双导流翼等部件组装而成。螺旋桨模型材料为铝合金,其各项参数如表1所示。导管、凸台、吊舱舱体和吊柱材料采用有机玻璃,导管模型参数如表2所示。模型组装完毕后,在水平方向上导管与O-yz平面呈5°夹角(对应坐标系如图1),导管上方装有数控机床加工的凸台,可满足导管安装角度要求。全回转推进器试验模型整体安装见图5。
1.3.2 试验方法
试验按照ITTC 2008推荐的吊舱推进器试验程序进行。螺旋桨轴与水面平行,螺旋桨浸深大于1.5倍螺旋桨模型直径。全回转推进器模型安装在吊舱动力仪上进行,推进器各部分推力(螺旋桨推力、导管力和推进单元推力等)、拖车行进方向上的轴向力和侧向力及螺旋桨的扭矩等由吊舱动力仪的六分力天平测量。拖车配有计算机实时采集系统,在数据测量阶段保持恒定,采样完成后减速至停止。
1.3.3 试验装置
该试验在上海船舶运输科学研究所拖曳水池中进行,水池长192.0 m,宽10.0 m,深4.2 m。
4)试验方案
试验在常压条件下进行。螺旋桨为右旋桨,转速设定为21 r/s;试验水温10.6 ℃;水密度ρ=101.92 kgf/m3。试验内容如下。
(1)偏转角为0°,分别取0 m/s,0.25 m/s,0.50 m/s,0.75 m/s,1.00 m/s,1.25 m/s,1.50 m/s,1.75 m/s,2.00 m/s,2.25 m/s,2.50 m/s,2.75 m/s,3.00 m/s,3.25 m/s,3.50 m/s等15个来流速度进行试验;
(2)偏转角±5°,分别取0 m/s,0.25 m/s,0.50 m/s,0.75 m/s,1.00 m/s,1.25 m/s,1.50 m/s,1.75 m/s,2.00 m/s,2.25 m/s,2.50 m/s,2.75 m/s,3.00 m/s,3.25 m/s,3.50 m/s等15个来流速度进行试验。
(3)偏转角为±10°,分别取0 m/s,0.25 m/s,0.50 m/s,0.75 m/s,1.00 m/s,1.25 m/s,1.50 m/s,1.75 m/s,2.00 m/s,2.25 m/s,2.50 m/s,2.75 m/s,3.00 m/s,3.25 m/s,3.50 m/s等15个来流速度进行试验。
1.3.5 试验进行情况
各偏转角下的全回转推进试验单元和试验进行情况见图6~图11。
1.3.6 试验数据处理
全回转推进器进行敞水预报的原始数据有螺旋桨推力T1、螺旋桨扭矩Q、导管力T2、推进单元力Tuo及侧向力TL等。应用下列无因次化公式对试验的原始数据进行处理,得到全回转推进器模型各项水动力系数试验值并绘制曲线(纵坐标为各项水动力系数、横坐标为进速系数,侧向力系数曲线独立绘出)见图12。
(1)
(2)
(3)
(4)
(5)
(6)
(7)
其式(1)~(7)中:J为进速系数;KT为螺旋浆推力系数;KTd为导管推力系数;KTuo为推进单元推力系数;KTL为侧向力系数;KQ为扭矩系数;ηo为敞水效率;V为来流速度;n为螺旋桨转速,取n=21 r/s;d为螺旋桨模型直径,取d=0.175 m;ρ为水的密度,取ρ=101.92 kgf/m3;T1为螺旋桨推力;T2为导管力;Tuo为试验单元推力(推进器整体推力);Q为螺旋桨扭矩。
1.4 网格无关性验证
数值计算结果的精确性很大程度上依赖于网格划分的疏密程度。通过调节螺旋桨旋转域网格划分的疏密程度,采用4套疏密程度不同的网格,分别对进速0.5 m/s,1.5 m/s,2.5 m/s(对应进速系数J分别为0.136,0.408,0.68)时直流工况下(偏转角为0°)全回转推进器的水动力性能进行计算,对该数值计算策略进行网格无关性验证(见表2~表4,其中第3套网格为本次计算所使用的网格)。
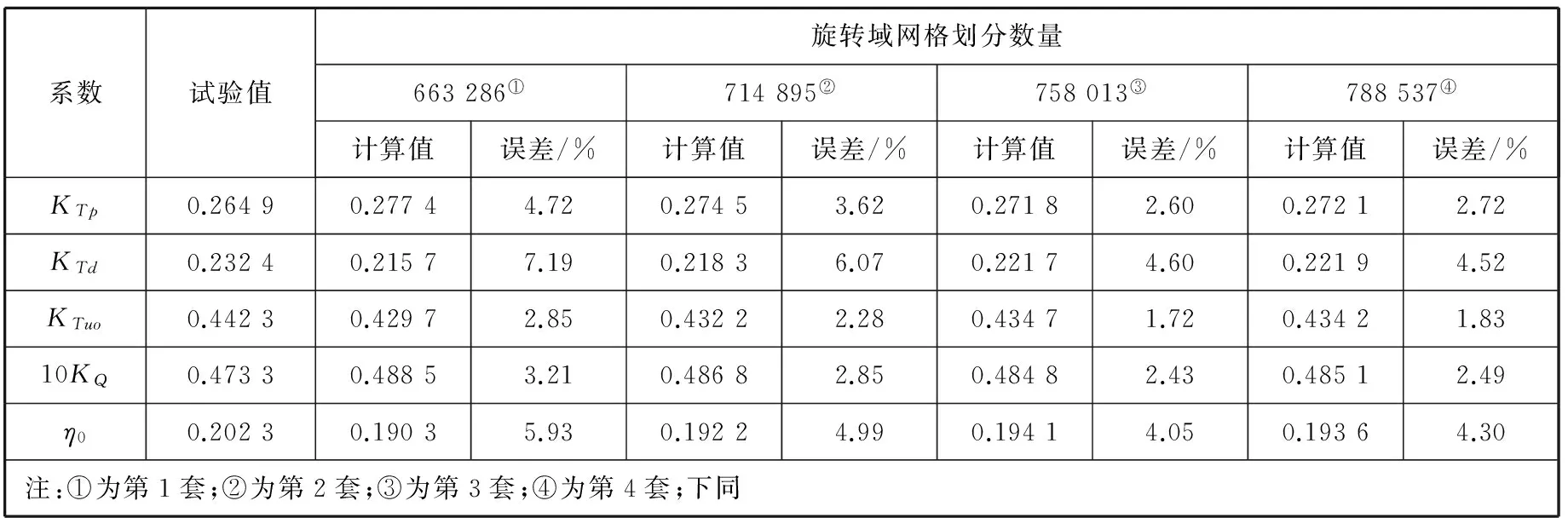
表2 J=0.136(V=0.5 m/s)时网格无关性验证

表3 J=0.408(V=1.5 m/s)时网格无关性验证

表4 J=0.68(V=2.5 m/s)时网格无关性验证
由表2~表4可知,在数值计算精确度上,第3套网格相比第2套和第1套均有较大改善,而第4套网格相比第3套无较大改善,由此可判定第3套网格的数量已满足网格无关性要求。
2 全回转推进器多偏角工况水动力特性分析
2.1 数值模拟与模型试验结果比对
各偏转角工况下全回转推进器水动力性能数值模拟与模型试验结果对比曲线见图13~图15。
由图13~图15可知,对螺旋桨推力系数KTp和扭矩系数KQ而言,全进速范围内计算值稍大于试验值,两者贴合性较好,计算误差小;对导管推力系数KTd、推进单元推力系数KTuo及敞水效率ηo而言,相对低进速范围内计算值稍小于试验值,而相对高进速范围内计算值要稍大于试验值,计算值与试验值贴合性稍差,但计算误差在可接受范围内。数值模拟与模型试验结果对比表明,此处采取的计算策略具有较高的可靠性和计算精确性,能较准确地预报全回转推进器模型多偏转角工况下的敞水性能。
由以上各曲线可得出多偏角(0°,±5°,±10°)工况下全回转推进器模型各项水动力系数随进速的变化规律如下。
1) 螺旋桨推力系数KTp、导管推力系数KTd、推进单元推力系数KTuo和扭矩系数10KQ均随进速的增大而减小。其中:KTp和10KQ在全进速范围内随进速下降的趋势较为平缓,变化范围较小(KTp变化范围为0.2~0.3,10KQ变化范围为0.3~0.5);而KTd和KTuo在全进速范围内随进速下降的趋势较为剧烈,变化范围较大(KTd变化范围为0~0.3,KTuo变化范围为0.1~0.5)。
2)敞水效率ηo曲线为一类抛物线,各偏转角下敞水效率ηo曲线均在进速系数J≈0.5时达到峰值,计算值达到峰值时对应的进速稍大于试验值达到峰值时对应的进速。
2.2 进速、偏转角对水动力性能影响分析
分别选取3个具有代表性的来流进速0.5 m/s,1.5 m/s,2.5 m/s(对应进速系数J分别为0.136,0.408,0.680),依据各进速下全回转推进器模型各偏转角工况下水动力系数的计算值与试验值,对不同进速下偏转角对水动力系数的影响规律进行分析,得出进速对水动力系数随偏转角变化规律的影响。表5~表9给出进速0.136,0.408,0.680时,各偏转角下螺旋桨推力系数KTp、导管推力系数KTd、推进单元推力系数KTuo、扭矩系数10KQ及敞水效率ηo的计算值与试验值,用百分比表示相对误差。

表5 不同进速系数、多偏转角况下F螺旋桨推力系数试验值与计算值

表6 不同进速系数、多偏转角工况下F导管推力系数试验值与计算值

表7 不同进速、多偏转角工况下F推进单元推力系数试验值与计算值

表8 不同进速、多偏转角工况下F螺旋桨扭矩系数试验值与计算值

表9 不同进速、多偏转角工况下F效率系数试验值与计算值
由表5可知:J=0.136(低进速范围)时,在偏转角由-10°增大到10°的过程中,KTp趋势呈小梯度递减,随偏转角变化并不明显;当J=0.408(中进速范围)时,在偏转角由-10°增大到10°的过程中,KTp呈小梯度先递增后递减趋势,其在0°时达到峰值,随偏转角的绝对值增大而减小;当J=0.680(高进速范围)时,在偏转角由-10°增大到10°的过程中,KTp的变化规律与J=0.408时相同。进速V对KTp随偏转角变化剧烈程度的影响低,但对变化趋势有一定影响。
由表6可知:当J=0.136(低进速范围)时,在偏转角由-10°增大到10°的过程中,KTd呈小梯度递减趋势,其随偏转角的变化不明显,但在偏转角=10°时有少许上扬;当J=0.408(中进速范围)时,在偏转角由-10°增大到10°的过程中,KTd呈小梯度折线变化趋势,其在偏转角=10°时达到峰值,在偏转角=-5°时达到谷值;当J=0.680(高进速范围)时,在偏转角由-10°增大到10°的过程中,KTd趋势呈类二次曲线变化,其在偏转角=0°时达到谷值,随偏转角绝对值增大而增大,偏转角为正时大于偏转角为负时。不同进速下,KTd随偏转角变化的趋势也不同,变化的剧烈程度也存在差异。
由表7可知:在3个不同进速下,KTuo具有相同的类抛物线变化趋势,其在0°时达到峰值,随偏转角绝对值的增大而减小,而其随偏转角变化剧烈程度随进速增大而提高。进速对KTuo随偏转角变化趋势无明显影响,但对变化剧烈程度影响较大。
由表8可知:当J=0.136(低进速范围)时,在偏转角由-10°增大到10°的过程中,10KQ呈小梯度递减趋势,其随偏转角变化并不明显;当J=0.408(中进速范围)时,在偏转角由-10°增大到10°的过程中,10KQ呈微小梯度递增趋势;当J=0.68(高进速范围)时,在偏转角由-10°增大到10°的过程中,10KQ趋势呈微小梯度先递增后递减,其在偏转角=0°时达到峰值,随偏转角绝对值的增大而减小,但变化的幅度非常小。与KTp相似,进速V对10KQ受偏转角变化剧烈程度的影响并不大,但对变化趋势有一定影响。
由表9可知:ηo与KTuo类似,在3个进速下,具有相同的类抛物线变化趋势,其在偏转角=0°时达到峰值,随偏转角绝对值的增大而减小。进速的影响体现为ηo随偏转角变化剧烈程度的差异,当J=0.408(中进速范围)时ηo随偏转角变化剧烈程度最高,计算值与试验值曲线曲率最大,当J=0.136(低进速范围)时次之,当J=0.68(高进速范围)时最小。与KTuo相似,进速对ηo随偏转角变化趋势无明显影响,但对变化剧烈程度影响较KTuo更大。
3 结 语
通过上述试验与计算,可分析得到以下结论:
1)这里采取的数值计算策略(包括计算域形状、网格划分方法及数量、边界条件及求解方法设置等),经模型试验验证具有较高的模拟精度及可靠性。
2)在各偏转角工况下,水动力系数(如KTp,KTd,KTuo,10KQ)均随进速的增大而下降,其中:KTp和10KQ的下降趋势较为平缓,变化范围较小;而KTd和KTuo的下降趋势较剧烈,变化范围较大;ηo曲线在J约为0.5时达到峰值,计算值达到峰值时对应的进速稍大于试验值达到峰值时对应进速。
3)不同进速下各项水动力系数随偏转角的变化趋势基本上体现为递增、递减、类二次曲线及折线等。进速V对各项水动力系数随偏转角的变化趋势及变化剧烈程度有着不同程度的影响。
[1] 盛振邦,刘应中.船舶原理[M].上海:上海交通大学出版社,2004.
[2] 马骋.吊舱推进技术[M].上海:上海交通大学出版社,2007.
[3] 谭仲楷.一种新型的推进系统-吊舱式电力推进与常规推进的组合[J].船舶,2006(1):20-23.
[4] 孙洪波.螺旋桨逆转工况下船舶运动建模与仿真[D].大连:大连海事大学,2007.
[5] 刘长卿.全回转推进船舶尾部振动特性的研究[D].上海:上海交通大学,2014.
[6] 陆惠生.船舶操纵性衡准及在初步设计中的应用[J].上海交通大学学报,1991,25(4):67-76.
[7] 车霖源,杜云龙,陈伟民.混合对转桨吊舱推进器水动力性能研究[C]//中国造船工程学会.2015年船舶水动力学学术会议论文集.北京:中国造船工程学会,2015:198-204.
[8] 叶金铭,熊鹰,张伟康,等.用非定常面元法预报拖式吊舱螺旋桨水动力性能[J].上海交通大学学报,2009(2):213-216.
[9] 郭春雨,杨晨俊,马宁.吊舱推进器定常水动力性能计算[J].船舶力学,2010,14(1-2):28-33.
[10] 胡健,黄胜,解学参.非均匀流中吊舱推进器的数值模拟[C]//中国造船工程协会.中国造船工程学会2007年优秀学术论文集.北京:中国造船工程协会,2008.
[11] 史一鸣,张文斌,陈刚.单桨运输船采用吊舱式推进器性能试验研究[J].中国造船,2010,51(4):36-44.
[12] 刘洪梅,许文兵,陈雄,等.吊舱推进与传统推进船舶操纵性能对比分析[J].船舶力学,2011,15(5):463-467.
Research on Hydrodynamic Performance of Azimuth Thruster Under Multiple Turning-Angle Working Conditions
ZHANGWencan,DONGGuoxiang,CHENWeimin
(State Key Laboratory of Navigation and Safety Technology, Shanghai Ship&Shipping Research Institute, Shanghai 200135, China)
The numerical simulation strategies of azimuth thruster under multiple turning-angle working conditions are researched and designed, and the hydrodynamic performance of which is numerically simulated using CFD software Fluent. In order to verify the validity of the above-mentioned numerical simulation strategies, model test of azimuth thruster under multiple turning-angle working conditions is conducted at the towing tank of SSSRI. It is through comparison of model test results with that of numerical simulation that the validity of the numerical simulation strategies are verified. Based on model test and numerical simulation results, the hydrodynamic performance of azimuth thruster under multiple turning-angle working conditions and at different velocities is analyzed, and the influence of turning angle and velocity on hydrodynamic performance of azimuth thruster is summarized.
azimuth thruster; turning-angle; hydrodynamic performance; numerical simulation; model test
2016-10-10
张文璨(1990—),男,辽宁沈阳人,博士生,主要从事船舶推进器水动力性能研究。
1674-5949(2017)01-0006-10
U664.3
A
猜你喜欢
科学大观园(2022年14期)2022-07-17
舰船科学技术(2021年12期)2021-03-29
舰船科学技术(2020年6期)2020-11-27
航空发动机(2020年3期)2020-07-24
当代陕西(2018年12期)2018-08-04
船舶与海洋工程(2018年2期)2018-05-16
中学科技(2017年10期)2017-11-04
航空模型(2016年10期)2017-05-09
科技创新导报(2016年31期)2017-03-30
