
钻井平台倾角全回转推进器优势概述
2018-05-16 09:45程伟俊蒋爱国朱征宇
船舶与海洋工程 2018年2期
程伟俊,蒋爱国,朱征宇,张 磊
(中海油田服务股份有限公司,河北 燕郊 065201)
0 引 言
随着深海石油和天然气勘探活动日益频繁,作业水深不断增加,海洋钻井平台在某些海域遭遇恶劣气候状况的概率逐渐增大,作业难度不断提高;同时,有关其航行性能、操纵性能及定位系统的要求日益严苛。因此,需实现钻井平台推进系统的技术突破,优化其推进性能、提升其推进效率,同时,必须兼顾平台操纵的灵活性。全回转推进系统是一种推进与操控合一,可提供任意方向推力的全方向推进装置,是满足钻井平台动力定位特殊要求的推进与操控合一的动力系统[1]。
全回转推进器的轴是竖向立轴,螺旋桨可绕轴线作360°的回转,可在任意方向上获得最大推力;钻井平台能实现原地回转、横向移动、急速后退和在微速范围内操舵等特殊操纵。全回转推进器凭借自身可观的推进效率、优良的操纵性能及便捷的安装维护等优点,受到业内相关人员的广泛关注。全回转推进器已成为船舶与海洋钻井平台动力定位依赖的重要装备。
1 全回转推进器研究现状
肖尔特公司是较早开始生产全回转螺旋桨的厂家,其主要产品有Z型回转推进器和Z型双桨全回转推进器,其中Z型双桨全回转推进器SPR对船舶的舵桨系统进行了性能优化,可提升20%的推进效率[2]。罗罗公司开发的 Azipull全回转推进器具有流线型附体,利用单机低速齿轮传动,采用牵引式螺旋桨,将其应用到海洋供给船上,对提高船舶的推进效率有很大作用[3]。
然而,随着研究的不断深入,推力系统的水力干扰问题成为全回转推进系统推力设计中需重点考虑的问题。在船体底部工作的推进器与船体和附近推进器之间会产生复杂的相互干扰。目前尚无较为完善的理论方法来精确计算这些干扰,大多数预测还是通过基于模型试验的半经验方法进行。
LEHN[3]和MOBERG等[4]等对2个螺旋桨呈前后布置的形式进行试验,结果表明,2个螺旋桨距离越近,干扰问题越严重,船舶尾流会在相当大的范围内对下游螺旋桨产生影响,在16倍直径距离处推力损失仍在25%左右[4]。
由于船体形式和推进器方向有很多种,螺旋桨与船体之间的干扰问题较为复杂。在实际设计中,需考虑的干扰形式有以下几种。
(1) 摩擦力:当在平坦的船体底部安装推进器时,推进器尾流将紧贴船底板,产生与推力方向相反的摩擦力,导致推力衰减,衰减幅度为 20%~25%;当在船体端部安装推进器时,尾流在沿着船体流向另一端的过程中会产生很大的摩擦力。
(2) 柯安达效应:当船体表面(如舭部连接处)为曲面时,螺旋桨尾流沿着曲面扩散,在曲面附近形成低压区域,造成压差阻力,从而抵消部分推力。NIENHUIS[5]曾用不同形式的舭部和舭部半径进行研究,结果显示:舭部半径越大,推力器距离舭部越远,则柯安达效应越强,压差阻力越大,推力衰减可达到15%。
(3) 双浮体的影响:ENGLISH[6]研究发现,当螺旋桨安装在非常靠近平坦的船体底部且距离大半径舱部较远时,尾流迹线偏转角度可达29°,大大超过开放水域中的尾流扩散角8°~10°。这会对双浮箱半潜式平台造成相当大的影响,因为向上偏转的尾流会直接冲击到另一个浮箱,导致总推力损失。NIENHUIS[5]曾测量另一个浮箱受到的力为螺旋桨推力的8%~12%。
经过近几年的研究,大部分相关学者及公司都得到相同的结论,即:当上游螺旋桨改变角度或增加距离时,可减小其尾流对下游螺旋桨直接而强烈的冲击,同时可减少推进器尾流与船体间的相互干扰,且干扰问题能得到改善。NIENHUIS[5]和LEHN[3]的试验结果都证明了这一点,其对不同的角度和不同的距离进行试验,试验结果一致,改变角度能大大改善推力损失状况,特别是当两桨之间的距离较大时,在 10°范围内的角度调整对避免干扰非常有效。
2 倾角推进器性能
瓦锡兰公司制造出一种新的推进器,使得动力定位装置的性能得到进一步提高。在设计过程中,不仅优化单个推进器在开放水域的动态性能,还分析完整的船舶推进性能。基于该设计制造推进器螺旋桨轴向下倾斜8°的推进器。图1为直角推进器和倾角推进器直观图。本文基于瓦锡兰公司的8°倾角推进器进行性能分析。

图1 直角推进器与倾角推进器直观图
2.1 倾角推进器在钻井平台航行时的性能
对于钻井平台或钻井船而言,航行是其重要的操作工况。图2给出BULTEN等[7]通过数值模拟得到的直角推进器和倾角推进器水力学分析及模型试验的流线图。从图2中可看出,艉部流线的差异是显而易见的,在钻井平台或钻井船航行期间,直角推进器的推力衰减系数约为 0.22,而 8°倾角推进器的衰减系数仅为0.01,这很好地解释了为何图2中倾角推进器的尾流没有与船底发生任何接触。
2.2 倾角推进器与船体的作用
推进器与船体相互作用的流线图见图3和图4。图3为推进器与船体沿平坦的船体表面相互作用的结果。传统的直角推进器在相同距离处下游的流线与船底板之间产生相互作用。在虚线标示区域,由于与船体的相互作用,流线发生偏转,这将导致沿船体的流速加快,因此摩擦损失增加。倾角推进器的流线充分向下偏转避免与平的船底板相互作用。对于给定的船体长度,倾角推进器的推力衰减在5%左右;直角推进器的推力损失在20%左右。
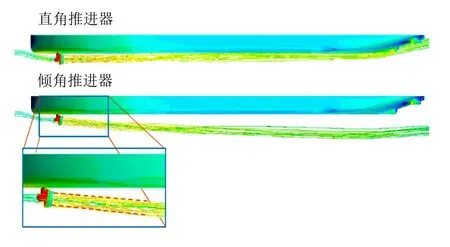
图2 航行时2种推进器对比
图4中的流线指示半潜式钻井平台推进器侧推的方向。传统的直角推进器的尾流与第二浮箱相互作用,可通过流线的偏转及船体表面增加的侧压力清晰地判断。倾角推进器的尾流向下偏转,因而没有观察到其与第二浮箱有明显的相互作用。直角推进器的推力衰减系数约为50%,而倾角推进器仅<5%。
流线可用来估算螺旋桨推出的水流的偏转量和尾流的扩大角度。常规的直角推进器的尾流与水平轴线成一条直线与预期是一致的。但是,8°倾角推进器产生的有效推力轴线只向下偏转5°,相对于轴线有明显的角度减小。尾流在2种情况相对于轴线的扩大角度都大约为4°。5°的有效推力轴线结合4°的尾流扩展角直接导致尾流最小向下偏转1°。倾角推进器推出的水流向下偏转限制在1°,因此不会对浮箱产生明显的干扰。基于该方法可得出倾斜角度<8°的推进器会与船体产生一定的相互作用的结论。该结论与其他出版物中提出的研究结果相同[8,9]。
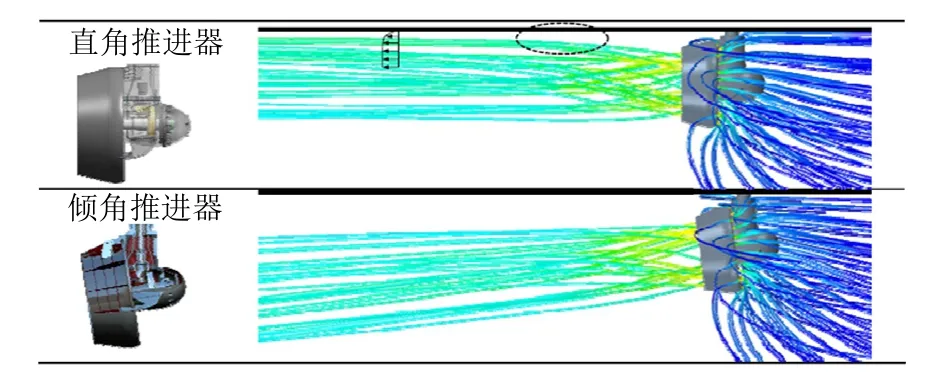
图3 推进器与船底板的相互作用示意
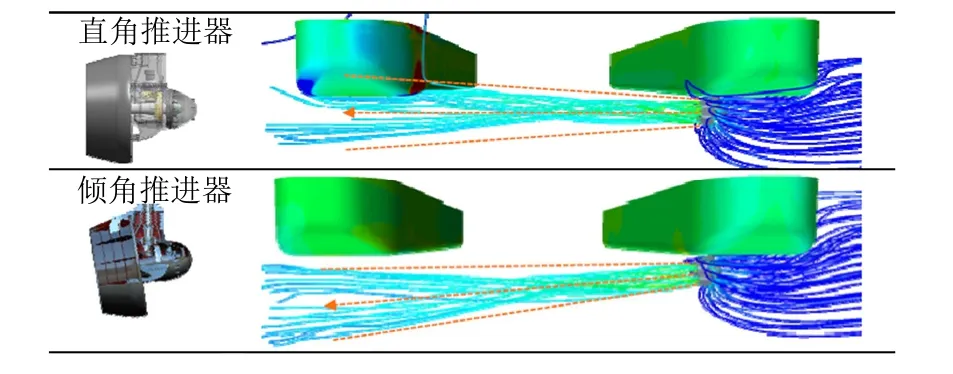
图4 推进器与浮箱相互作用示意
2.3 倾角推进器之间的作用
推进器与推进器之间相互作用的分析比推进器与船体之间相互作用的分析更为复杂。对于推进器之间的相互作用来说,2个推进器之间的距离和上游推进器的转动角度都是重要的参数。2个推进器之间的相互作用可通过上游推进器的流管图显现。图5为推进器与推进器相互作用示意,2个推进器都为5°操作角。理论上已知的是在7倍螺旋桨直径距离内,禁区大概为16.8°。因此,在5°操作角情况下,推进器不可避免地会发生相互干扰。
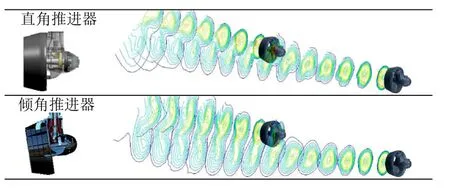
图5 推进器与推进器相互作用示意
从图5中可明显看出,直角推进器之间的相互干扰很明显。上游推进器的圆形部分被吸入到下游推进器。虽然仍在5°的操作角上,但倾角推进器间的相互干扰小得多。下游推进器的流管图形变得更圆,直接导致倾角推进器比直角推进器的禁区小。
2.4 确定禁区
以8个推进器的半潜式平台为例,在任意2个推进器成直线的方向上将发生干扰,当直角推进器在侧方向上产生推力时,推力损失约有50%。推力损失是由推进器与推进器的相互作用产生的。禁区可基于推进类型及推进器的距离计算得出。
对于倾角推进器来说,唯一的推力损失来源于部分情况下推进器的相互干扰,在所有工况下,最大的推力损失仅有5%。图6为推进器在不同操作角下的推力损失。

图6 推进器在不同操作角下的推力损失
2.5 推进器的定位能力
为进一步估算独立的推进器在目标方向上的有效推力,建立一个简单的数值模型,每个推进器都被定位在目标推力方向上。此外,对每个推进器的转向角都进行评估,避免所有的禁区。假设有一个推进器单元被放置在禁区内,通过调整操作角来避免禁区。
基于该模型,可确定8个推进器在满功率情况下的可用推力。8个推进器在要求的方向上的总推力与总的可用系柱拉力正常化。
直角推进器与倾角推进器之间的差异可通过不同的方式进行评估。图7用2种方法来呈现差异。图7a)中绘制有2个极坐标图。由图7a)可知,直角推进器只覆盖倾角推进器的一部分。为更详细地量化倾角推进器与直角推进器的差异,给出图 7b)。图 7b)中:上部虚线显示的是倾角推进器在侧方向上操作(90°或270°)时的最大推力增益约为35%;下部虚线显示的倾斜推进器向前的推力增益,约为9%;在360°方向上的可用推力的平均增加量约为19%。
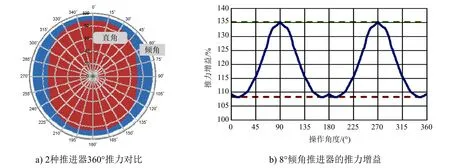
图7 倾角推进器优势对比
3 结 语
通过分析,得到以下结论:
(1) 由导流罩喷出的流线图可直观地发现,8°倾角推进器可有效避免与船底及浮箱的之间的相互干扰和推进器与推进器之间的相互干扰,有效增加平台的定位能力。
(2) 分析推进器尾流与船体及浮箱的相互作用,倾角推进器可有效减小与船底板的摩擦;分析倾角推进器倾角的选择依据,8°倾角推进器的尾流轴线只有5°,而尾流扩散角度为4°,因此可避免尾流与浮箱的相互干扰。
(3) 对比分析倾角推进器与直角推进器的禁区,倾角推进器的推力平均比直角推进器增加19%左右。
(4) 倾角推进器对比直角推进器具有更独特的优势,后期将在钻井平台倾角推进器及直角推进器经济性方面进行信息收集和对比研究。
【 参 考 文 献 】
[1] 郁玉峰,梅斌贤,徐高峰,等.大功率海工可调螺距全回转推进系统[J].中外船舶科技,2015 (4): 20-23.
[2] 王培生.全回转推进器的水动力性能研究[D].哈尔滨:哈尔滨工业大学,2007: 4-8.
[3] LEHN E.Thruster Interaction Effect[R].The Ship Research Institute of Norway (NSFI Report), 1980.
[4] MOBERG S, HELLSTRÖM A.Dynamic Positioning of a Four-Column Semi-Submersible-Model Tests of Interaction Forces and A Philosophy about Optimum Strategy when Operating the thrusters.[C]//Proceedings of the Second International Symposium on Ocean Engineering and Ship Handling, pp443-480,March 1-3, 1983.Gothenburg, Sweden.
[5] NIENHUIS U.Analysis of Thruster Effectivity for Dynamic Positioning and Low Speed Manoeuvring[D].Dissertation of Technical University Delft, 1992.
[6] ENGLISH J W.Propeller/hull interaction[C]//Proceedings of the 14th International Towing Tank Conference, 1975.
[7] BULTEN N, STOLTENKAMP P.DP-capability of tilted thrusters[C]//Dynamic Positioning Conference, Houston, 2013.
[8] MATTILA M, YLITALO J.Semisubmersible rig – the reliable solution with minimal thrust losses[C]//Dynamic Positioning Conference, Houston, 2002.
[9] JÜRGENS D, PALM M, AMELANG A, et al.Design of reliable steerable thrusters by enhanced numerical methods and full scale optimization of thruster-hull interaction using CFD[C]//Dynamic Positioning Conference, Houston, 2008.
猜你喜欢
兵器装备工程学报(2022年10期)2022-11-01
小型微型计算机系统(2021年12期)2021-12-08
舰船电子工程(2021年6期)2021-06-28
科学与财富(2021年33期)2021-05-10
舰船科学技术(2021年12期)2021-03-29
课堂内外(小学版)(2020年5期)2020-07-20
VOGUE服饰与美容(2019年10期)2019-12-02
中国房地产业·中旬(2019年2期)2019-10-21
科技与创新(2019年17期)2019-09-21
当代陕西(2018年12期)2018-08-04
