
变电站现场作业与风险管控的三维实景推演仿真
2017-04-07 08:04:01杜勇陈钊刘锋王先兵
华侨大学学报(自然科学版) 2017年2期
关键词:风险管控
杜勇, 陈钊, 刘锋, 王先兵
(1. 国网湖北省电力公司 检修公司, 湖北 武汉 430050;2. 国网电力科学研究院 武汉南瑞有限责任公司, 湖北 武汉 430074;3. 武汉大学 水利水电学院, 湖北 武汉 430072;4. 武汉大学 计算机学院, 湖北 武汉 430072)

变电站现场作业与风险管控的三维实景推演仿真
杜勇1, 陈钊2, 刘锋3, 王先兵4
(1. 国网湖北省电力公司 检修公司, 湖北 武汉 430050;2. 国网电力科学研究院 武汉南瑞有限责任公司, 湖北 武汉 430074;3. 武汉大学 水利水电学院, 湖北 武汉 430072;4. 武汉大学 计算机学院, 湖北 武汉 430072)
利用三维激光扫描技术对变电站进行精确三维实景重构,并在虚拟仿真层面上,在三维场景平台中对变电站设备进行正常巡视和故障检修的推演仿真,形成现场作业的辅助指导方案.然后,结合惯性导航与实时视觉定位技术,获得实际工作人员、工程车辆等在变电站中的位置,分析得到实际工作人员与车辆的运动趋势,并与变电站三维实景模型中建立的高压带电危险区域进行软碰撞检测,从而实现现场作业与巡检的风险管控,及时制止作业过程中误入带电危险区域的操作. 关键词: 三维实景重构; 三维激光扫描技术; 惯性导航系统; 视觉系统定位; 风险管控; 软碰撞检测
目前,国家电网的变电站大都实现智能化无人值守,三维仿真与虚拟现实在电力领域的应用与研究越来越深入,使智能变电站的三维实景建模及其相关应用研究成为热点[1].对变电站进行三维实景仿真的前提是对变电站进行建模.国内和国外常用的变电站建模手段主要有以下两种:一是利用地面激光雷达扫描变电站,获取密集的三维点云数据,再用三维建模工具进行变电站建模;二是基于变电站的设计图纸与变电设备的厂家图纸,采用三维软件,构建各种设备模型,组合拼装构成整个变电站的三维模型[2].这两种方法,建立的模型非常细致,每个元件都可单独建模,再辅之以面向对象的编程等手段,可形成非常完备和清晰的变电站模型.基于设计图纸与设备图纸的三维重构方法要求变电站资料齐全,三维重构模型中设备的空间位置与尺寸大小精度依赖于三维重构人员的技术与责任心,而基于激光扫描技术的三维重构方法不存在上述缺陷,并能够在采集点云数据的同时采集纹理材质[2].本文通用三维激光扫描技术进行精确的变电站三维重构,直接在变电站三维实景模型上进行现场作业的推演仿真,并结合惯性导航与视觉定位技术,实现现场作业与巡检的风险管控.
1 变电站三维激光实景重构
采用三维激光扫描仪进行非接触式测量方式,能解决已有先进测绘仪器在变电站这种特殊的领域不能进行正常作业的特殊环境测量工作.激光扫描仪通过发射激光束照射物体表面,通过接收反射回来的激光计算出目标物体的方位、距离等信息.通常在一个固定的地点按照预定轨迹进行激光束扫描,并记录获取的反射激光点相关信息.由于激光束扫描非常精细,能够获取大量的反射激光点,称为激光点云.将不同测站点获取的激光点云进行配准,可以把多个测站点获取的空间数据统一到同一个坐标系,从而获得整个变电站的三维激光点云[3].
采用基于Pointcloud与Auto CAD建立变电站场景模型.Kubit公司开发的Pointcloud点云处理软件与Auto CAD联合使用可以导入海量的变电站点云数据;然后,通过自动拟合的方式生成弧、圆、平面、圆柱等简单几何体,进而快速提取激光点云数据中的各种形状的特征量;最后,采用Auto CAD软件的旋转、拉伸等功能进行各种设备的三维建模.通过这种方法构建的变电设备模型不仅仿真度非常高,而且建模效率也很高.具体的三维实景建模基本方法与流程[1]有如下3个方面.
1) 规则设备的建模.直接采用Pointcloud软件截取点云中对应电气设备的规则形状点云数据,比如圆环、圆柱、立方体等,然后,进行拟合生成相应的模型.
2) 不规则设备的建模.采用Pointcloud进行不规则设备的点云切片,以某个坐标轴方向作为基准,剖分不规则设备的点云数据,生成许多点云切片;然后,采用多义线拟合方法进行点云切片,拟合生成该设备的二维轮廓图;最后,在二维轮廓图的基础上,通过扫掠、拉伸、旋转等方法生成该设备的三维线框模型.
3) 变电站的三维建模.参照整个变电站精确的三维激光点云数据,采用Auto CAD将上述各种电气设备模型在统一坐标系下拼装形成完整的变电站模型.
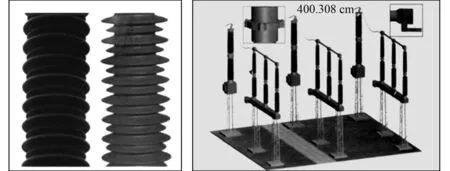
(a) 绝缘套管实物 (b) 绝缘套管模型 图1 基于Pointcloud与Auto CAD建立变电站绝缘套管建模Fig.1 Establishment of substation insulation sleeve based on Pointcloud and Auto CAD
采用Z+F 5010型地面激光雷达扫描仪对湖北省武汉市的凤凰山500 kV变电站进行了三维实景建模[1].主变电站2-H构架三维实景模型,如图1所示.采用上述建模方法获取2-H构架的点云数据;然后,生成绝缘套管的三维线框模型;最后,通过贴图获得套管真实模型.由于采用激光扫描进行套管三维线框建模,精度很高,而且通过彩照贴图,保证2-H构架绝缘套管的三维实景模型具有很高的仿真度,与现场设备高度吻合.比如图1(a)的支柱绝缘子、图1(b)左上方的套管法兰和右上方的横梁金具,均能够表现部件的细节与真实纹理.另外,在三维实景模型中,两相绝缘套管之间的测量距离为400.308 cm,与设计图纸的400.000 cm相比,误差不超过0.5 cm[1].
2 现场作业推演仿真
通过三维激光扫描技术获取整个变电站内设备与构筑物的精确物理空间位置、尺寸大小之后,需要对现场作业设备和作业流程进行建模仿真.对于高压/特高压变电站来说,现场作业时人员与工程车辆需要与高压带电体保持足够的安全距离,比如500 kV变电站需要距离带电母线5 m.现场作业推演的关键是依据相关电力安全作业规程,在变电站三维实景模型上自动划定高压带电危险区域[4].方法是利用变电站三维实景建模,通过精心设计和挑选施工设备摆放位置和吊车起吊角度,形成一套变电站现场作业方案,减少断电时间和断电区域,从而减少变电站维护成本.
现场作业推演仿真过程:1) 通过变电站的运行状态确定带电体设备,自动划定带电危险区域;2) 不断对参与作业的人员、设施和车辆的模型与变电站三维实景模型进行碰撞检测;3) 形成现场作业方案.由于变电站三维模型划分为带电区域与非带电区域,对应的碰撞检测分为软碰撞检测与硬碰撞检测.软碰撞检测是移动物体模型与带电区域模型的碰撞检测,需要在变电站三维实景模型中精确地给带电物体建立包围盒,保证带电体表面任何一个像素点的法线方向有一个带电距离的碰撞检测点.
采用图形学的膨胀算法实现软碰撞检测,即带电体对象的表面像素点沿法线方向向外膨胀足够的高压安全距离,形成胶囊体状的包围盒.图像膨胀方法:把结构元素X平移a后得到Xa,如果Xa击中结构元素Y,记下a点,所有满足上述条件的a点集合称做Y被X膨胀的结果[5].带电区域划定的膨胀生成算法原理:1) 点目标P的带电区,以P为点生成元,借带电距离E规定像元加粗的结构元素,然后,进行像元的膨胀;2) 线目标L的带电区,以L为线生成元,借带电距离E规定像元加粗的结构元素,然后,进行像元膨胀;3) 面目标A的带电区,以A的边界线LA为轴线,借助带电距离E规定像元加粗的结构元素,并进行像元膨胀.
3 变电站三维实景建模中定位信息的联控
经过对变电站的三维实景模型的建立和带电区域软碰撞检测的实现,在虚拟仿真层面上,可以在三维场景平台中对变电站设备进行正常巡视,故障检修的推演仿真.但如果想将推演仿真的结果应用于实际现场作业的风险管控,必须将实地工作人员在变电站中的实际坐标,与其在变电站三维仿真场景模型中的位置进行一个映射,正确反映出实际工作人员在变电站中的位置.现在比较主流的实时定位技术,可能有无线定位技术[6]、使用GPS的RTK基站相对定位、惯性导航系统[7]与视觉导航定位[8]等.
3.1 惯性导航定位
惯性导航系统的原理是利用加速度计测量载体本身的运动的加速度,由加速度使用积分进行运算得到运动载体的速度信息,对速度信息再次使用积分策略能够得到物体的位置信息,进而得到载体的定位信息[7].
由于惯性导航系统一般都是装在在一个惯性平台或者直接安装在载体之上,在经过初始化之后,以初始化点为起点,运用自主式导航,其所测量得到的数据都依赖于本身的器件设备,通过将测量所得的数据经过计算可实施定位功能.惯性导航系统一般是由惯性测量装置,核心计算设备,控制显示设备等组成.一个惯性测量装置称为一个惯性测量单元,是由加速度计和陀螺仪组成.陀螺仪拥有3个自由度,在坐标系的3个方向上测试运动载体的方向速度,利用3个加速度计对运动载体的3个方向的平移运动进行计算.测量平台分为平台式和捷联式,前者使用惯性平台装载惯性测量设备,其精准度比较高;后者无平台,直接安装在载体之上,工作条件不佳,对精度影响较大.
3.2 双目立体视觉系统
视觉导航定位方法(VSLAM)是一种仅用摄像头即可进行定位导航的方法.它通过提取图像帧的特征点,在图像帧序列之间进行特征点匹配,并通过跟踪图像特征点的运动变化计算摄像头的运动轨迹.视觉导航的优势在于不依赖其他传感器,定位精度比传统的轮式里程计、雷达及惯性导航仪等相对定位技术相比,具有一定的优势,对传统定位方法是一种非常有效的补充,也是目前机器人的研究热点之一[9].
双目立体视觉采用固定好的两个摄像头通过视差原理获得同一场景中目标对象的三维几何信息,准确地恢复场景中目标对象的深度信息,从而解决单摄像头系统中尺度与深度信息难以获取等问题.系统的关键是双摄像头的标定,即相机的内部与外部参数的标定.内部参数标定,即确定相机的内部光学几何参数,包括相机中心、焦距和畸变等,这些参数都是固定不变的;外部参数标定,即确定相机坐标系与世界坐标系的关系,一般用3×3的旋转矩阵R和平移向量T表示.
在立体视觉系统中,还需要测量两个相机之间的相对位置.先用单摄像头标定方法得到两个摄像头内参和外参矩阵[Rl|Tl],[Rr|Tr],对任意点P,它的世界坐标系、左相机坐标系与右相机坐标系的坐标分别为Xw,Xcl,Xcr,三者关系为
消去Xw,可得
因此,左右相机坐标系的几何关系可以表示为
由此可得到双目立体视觉系统中左右相机的几何关系,即可实现立体图像对的校正,使左右相机两帧图像的外极线平行,从而获取图像中的深度信息.图像校正是通过绕光心旋转两个成像平面实现的.
3.3 视觉里程计
单目视觉里程计跟踪摄像头运动过程,实时提取图像帧中的特征点,根据这些特征点在三维空间中的位置变化计算摄像头的姿态、位置与运动轨迹,从而实现定位.单目视觉里程计一般提取图像帧中处于轮廓边缘、角点或者亮度变化显著的特征点,保证能够在连续两帧中进行对比跟踪.具体的计算方法:1) 通过特征提取获得某图像帧的特征点;2) 与前一帧图像的特征点进行匹配,得到前后两帧图像的相同特征点;3) 根据它们的三维坐标,求出摄像头的运动轨迹.基于双目相机的视觉里程计,不仅可以像单目摄像头一样实现空间定位,还可以获取场景中目标对象的尺度信息,能够精确地计算双目相机当前的位置与姿态信息[10].
3.4 视觉与惯性导航联合定位

图2 视觉惯导联合定位算法框架Fig.2 Framework of joint localization algorithm for visual inertial navigation
使用视觉摄像头结合惯性测量装置(IMU)的方案来做SLAM,一般被称作VIO(visual-inertial odometry).VIO主要关注如何更好地在Visual SLAM中融合IMU数据,而IMU数据不单可以帮助解决单目的尺度模糊问题,还可以提高SLAM的精度和鲁棒性[11].文中研究融合惯性导航,采用计算机视觉在变电站进行空间定位方法.首先,利用双目相机获取图像帧对,提取图像帧对的特征点,并对特征点进行匹配与跟踪,计算出双目相机的运动轨迹;与此同时,系统记录惯导装置的输出,计算出惯导的位姿信息,并对双目相机的全局位姿信息进行修正,建立扩展卡尔曼滤波模型,最终获得比较精确的运动估计参数.
视觉惯导联合定位算法框架,如图2所示.每个时刻的状态向量保存当前的姿态、速度和3D map points坐标等,然后用IMU做预测,再用图像帧中观测3D map points的误差做修正.扩展卡尔曼滤波每次修正是基于3D map points在单帧图像里观测的.文中采用MSCKF[12]的改进算法,即IMU预测跟扩展卡尔曼滤波一样,但是将修正步骤推迟到某一个3D map point在多个图像帧中观测之后进行计算,相当于基于多次观测同时优化姿态和3D map point.
4 变电站现场作业风险管控
在变电站检修过程中,需要实时地将定位信息传递给后台工作组,后台工作组能够方便将人员定位,并将消息发还给实地人员,提示人员当前位置.惯性导航系统与双目立体视觉系统的融合,可以通过人员运动的加速度和转动角信息判断人员的下一步运动位置,对未来的运动趋势做一个大体的预判.在对人员反馈的信息中包含警告与禁止,警告可以是对分析出来的趋势具有危险性的一个提示,而禁止则是对当前位置已处于危险区的信息反馈.
4.1 实验装置
针对现场工作人员,将双目摄像头与IMU融合装置固定在安全头盔上,可以为现场作业或巡检人员进行实时空间定位;对于工程车辆,则将双目摄像头与IMU融合装置固定在预先测量好的位置;而对于吊车等,需要另外在吊臂上固定一套装置.由于现场作业风险管控对定位信息的精度要求非常高,需要对参与现场作业的人员、设备、工程车辆进行预先建模,并且需要知道工作人员身高、工程车辆尺寸、吊臂长度等,才能准确地计算摄像头在目标对象上的精确安装位置.另外,需要对吊车吊臂伸展的角度、方向等通过摄像头的位姿信息进行计算.采用的解决方案是将摄像头与IMU融合的实时定位信息转换为目标对象在三维实景模型中的位置信息,并计算出目标对象在三维实景模型中的移动轨迹与碰撞检测结果,如果存在碰撞,则进行警告提醒.
4.2 实时定位信息联控的初始化
采用三维激光扫描重构保证变电站三维实景模型与物理模型位置、尺寸大小保持一致,但如何将双目摄像头与IMU的定位信息与三维实景模型对应需要有一个初始化过程.文中采取的方法是在大门入口设置一个测量好的标记,通过摄像头对标记的识别装置进行初始化,并与三维实景模型的坐标关联.由于视觉导航与惯性导航均存在累计误差问题,采取的措施是在变电站设置并测量多个标记,在现场作业的过程中进行误差纠偏.
通过实施实时定位信息的联控,在变电站三维模型中,可以直观地查看作业人员、设施、工程车辆的位置,自动发出危险提示,可以很好地对变电站维修、巡检等工作进行一个完整的指导.实施实时定位信息的联控为将来机器人作业奠定了很好的技术基础,巡检机器人可以实时获取在变电站的位置信息,以及周边的电气设备信息,工作人员可以远程指挥巡检机器人到指定的地点,检查指定的电气设备,可以随时更换巡检路线与巡检任务.未来变电站巡检机器人的控制方式将非常灵活,可以取代人工在无人值守智能变电站执行巡检任务,及时发现并上报甚至消除设备缺陷,预防电力事故的发生,确保智能变电站安全运行.
[1] 王仁德,杜勇,沈小军.变电站三维建模方法现状及展望[J].华北电力技术,2015(2):19-23.
[2] 王先兵,张学东,何涛,等.三维虚拟变电站数字可视化管理与监控系统[J].武汉大学学报(工学版),2011,44(6):786-791.
[3] 王道累,吴懋亮,陈军.从双视图到多视图的协同优化立体视觉匹配算法[J].华侨大学学报(自然科学版),2015,36(3):286-291.
[4] 赵锋,崔红梅.碰撞检测算法在变电站安全预警中的应用[J].中国电业(技术版),2013(12):35-37.
[5] 李秀峰,苏兰海.基于中值滤波和数学形态学的图像边缘检测[J].计算机与信息技术,2006(10):27-28.
[6] 丁锐,钱志鸿,王雪.基于TOA和DOA联合估计的UWB定位方法[J].电子与信息学报,2010,32(2):313-317.
[7] 杨敏.小型捷联惯性导航系统研究[D].长沙:中南大学,2010:1-6.
[8] DAVOSPN A J,REID I D,MOLTON N D,etal.MonoSLAM: Real-time single camera SLAM[J].IEEE Transactions on Pattern Analysis and Machine Intelligence,2007,29(6):1052.
[9] 路丹晖.融合视觉与惯性导航的机器人自主定位[D].杭州:浙江大学,2012:31-44.
[10] 彭勃.立体视觉里程计关键技术与应用研究[D].杭州:浙江大学,2008:19-34.
[11] LEUTENEGGER S,LYNEN S,BOSSE M,etal.Keyframe-based visual-inertial odometry using nonlinear optimization[J].The International Journal of Robotics Research,2015,34(3):314-334.
[12] MOURIKIS A I,ROUMELIOTIS S I. A multi-state constraint Kalman filter for vision-aided inertial navigation[C]∥IEEE International Conference on Robotics and Automation.Roma:IEEE Press,2007:3565-3572.
(责任编辑: 钱筠 英文审校: 吴逢铁)
Substation Site Operation and Risk Management and Control Based on 3D Real Scene Simulation
DU Yong1, CHEN Zhao2, LIU Feng3, WANG Xianbing4
(1. Maintenance Company, State Grid Hubei Electric Power Company, Wuhan 430050, China;2. Wuhan Nari Limited Liability Company, State Grid Electric Power Research Institute, Wuhan 430074, China;3. School of Water Resources and Hydropower Engineering, Wuhan University, Wuhan 430072, China;4. School of Computer, Wuhan University, Wuhan 430072, China)
This paper uses the 3D laser scanning technology to reconstruct the substation in accurate 3D realism. At the virtual simulation level, the derivation and simulation of the normal inspection and troubleshooting of the substation equipment are carried out in the 3D scene platform, and the auxiliary guidance program of the field operation is formed. Then, combined with inertial navigation and real-time visual positioning technology, the location of actual workers and engineering vehicles is obtained to analyze their movement trends, which can be used to make soft collision detection with the high-voltage live dangerous areas of substation in 3D real model. The soft collision detection can achieve on-site operation and inspection of the risk control, and therefor, which can timely stop entering dangerous areas during the operation process. Keywords: 3D real scene reconstruction; 3D laser scanning technology; inertial navigation system; vision system localization; risk management and control; soft collision detection
10.11830/ISSN.1000-5013.201702019
2017-02-14
杜勇(1973-),男,高级工程师,主要从事超特高压电网运行维护的研究.E-mail:duyyf@163.com.
国家电网公司科技项目(WNZ141-0013)
TM 764.1; TP 391.9
A
1000-5013(2017)02-0236-05
猜你喜欢
中小企业管理与科技·下旬刊(2016年12期)2017-01-17 16:22:21
商业经济研究(2016年23期)2017-01-10 17:11:18
合作经济与科技(2017年1期)2017-01-03 14:28:38
理论导刊(2016年12期)2016-12-27 13:59:23
科技创新与应用(2016年34期)2016-12-23 19:48:03
商(2016年30期)2016-11-09 09:04:29
商(2016年27期)2016-10-17 03:56:37
企业导报(2016年13期)2016-07-19 18:20:14
科技视界(2016年15期)2016-06-30 00:30:03
科技视界(2016年2期)2016-03-30 11:15:47
