电池剩余电量SOC估计
2017-03-31 08:44:57骆万博
长春工业大学学报 2017年1期
李 慧, 肖 伟*, 骆万博
(1.长春工业大学 电气与电子工程学院, 吉林 长春 130012;2.长春发电设备总厂, 吉林 长春 130012)
电池剩余电量SOC估计
李 慧1, 肖 伟1*, 骆万博2
(1.长春工业大学 电气与电子工程学院, 吉林 长春 130012;2.长春发电设备总厂, 吉林 长春 130012)
将卡尔曼滤波与自适应相结合, 通过二阶RC等效电路模型,将SOC(State of Charge)引入状态方程,建立电池状态方程,然后通过指数加权方法得到极大后验次优无偏估计器,增加了对噪声的估计。最后进行了simulink仿真验证。
荷电状态; 等效电路模型; 自适应卡尔曼滤波算法
0 引 言
随着不断加剧的环境污染和资源短缺等问题,当今世界的焦点也越来越集中到这两大问题上。各国都在努力开发可利用资源,这对汽车行业的发展开辟了一条新的途径。目前,电池正大量应用在电动汽车系统中,所以可靠而有效的电池管理系统变得特别重要,电池管理系统是电池设备必不可少的一部分,其最重要的特点就是可以准确地估计电池的SOC。现在比较常用的估计方法很多,文献[1]介绍了许多方法,比如安时计量法、开路电压法、神经网络法以及Kalman滤波方法等。综合比较这几个方法,前两种方法比较容易实现,但安时法有个明显的缺点,那就是电流误差会逐渐变大,还有一个问题就是它不能适应电池可用容量的变化。由于在实际应用中,电池会经常使用,所以电池会不断地出现老化,并导致可用容量越来越少,安时法的缺点就是会导致误差越来越大。在实际过程中,需要经常启动电池组,并且还要常常进行充放电,导致工作电流幅度变化很大,所以开路电压短时间很难稳定下来。虽然现在各种电池的估计采用神经网络法,但是需要训练大量的参考数据,受训练数据和训练方法对估计误差影响很大。虽然卡尔曼具有计算量低,对硬件要求低,但是它往往需要在噪声为一给定值的时候估计比较准确,若是噪声给的不精确,会导致发散现象,为了解决这个问题,文献[13]详细介绍了自适应卡尔曼,用自适应卡尔曼对噪声进行估计。
1 卡尔曼滤波算法
卡尔曼滤波是一种最优估计技术,它可以实现方差的最小,由一些数学公式构成,其中心思想是:现在状态的估计量是由前一时刻的估计值和实时得到的量测值进行更新得到的,其结构如图1所示。
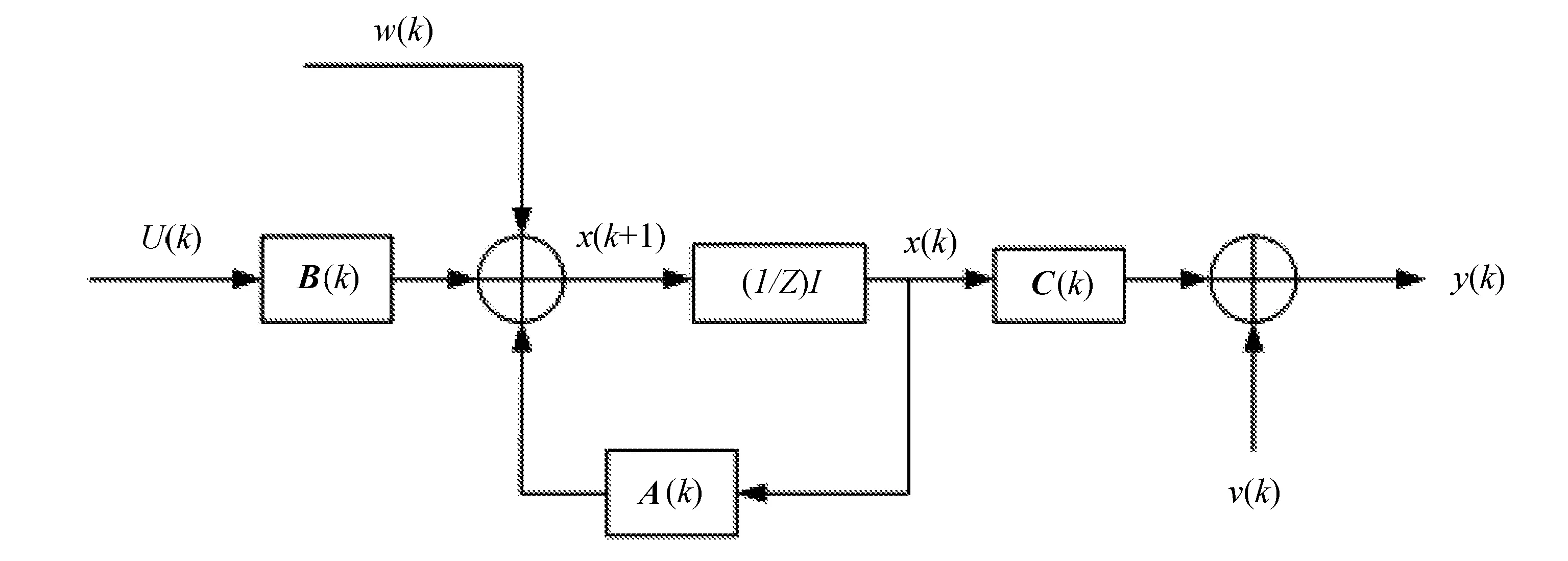
图1 结构示意图
图中:A(k)----k时刻系统矩阵;
B(k)----k时刻输入矩阵;
C(k) ----k时刻量测矩阵;
z-1I----延时环节;
u(k)----控制输入;
w(k),v(k)----分别为系统噪声和量测噪声。
系统方程为:
(1)
(2)
时间更新方程为:
(3)
(4)
式中:x(k+1|k)----下一时刻状态的最优估算值;
x(k|k)----现在状态的最优估计值;
p(k+1|k),p(k|k)----分别为x(k+1|k)与x(k|k)对应的协方差;
AT(k)----A(k)的转置矩阵;
Q(k)----w(k)的方差矩阵。
其量测更新方程为:
(5)
(6)
(7)
式中:K(k+1)----k+1时刻的增益矩阵;
CT(k+1)----转置阵。
2 电池模型的建立
有很多方法可以用于电池建模,比较各种建模方法,文中用二阶RC等效电路模型对电池进行建模。
RC等效电路模型如图2所示。
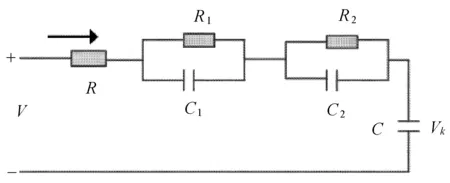
图2 RC等效电路模型
由如图2可知,电池的端电压为V,电流为I,R1两端的电压为V1,R2两端的电压为V2,C两端的电压为Vk,它表示电池的开路电压。等效电路模型直观且容易理解,参数容易计算,由图中可以容易得到它们的关系式为:
(8)
(9)
(10)
(11)
式中:V1,V2,Vk----状态量。
状态空间方程为:
(12)
可以设
(13)
式中:Soc----电池的剩余电量;
a,b----可变系数。
将Soc引入状态方程,则状态方程为:
(14)
(15)
3 基于常规卡尔曼滤波的SOC估计
由式(14)和式(15)得离散模型为:
(16)
(17)
在式(16)和式(17)基础上进行SOC估计,步骤如下:

(18)
2)由k-1时刻的状态和误差协方差矩阵对k时刻的状态和误差协方差矩阵进行时间更新,w(k),v(k)分别为过程和测量噪声,方差分别为Q,R:
x(k|k-1)=Ax(k-1|k-1)+
(19)
(20)
3)卡尔曼增益矩阵为:
(21)
4)根据下式得出现在状态(k)的最优估算值x(k|k):
(22)
5)要使卡尔曼算法一直循环,那么还要更新k状态下x(k|k)的协方差:
(23)
这样,算法就可以一直运算下去,能得到每一步的状态最优估计。
4 采用自适应卡尔曼进行估计
4.1 自适应卡尔曼滤波原理
采用常规卡尔曼算法对电池SOC进行估计时,已经是给噪声一个给定值,并且为高斯白噪声,但是在电动汽车实际运行中,噪声的特性通常是不确定的,若是给定一个值,可能会存在误差,随着算法不断地递归下去,误差会越来越大,结果会导致发散现象,最终影响估计精度。
卡尔曼滤波存在发散这个现象,为解决这个问题,在常规卡尔曼基础上加了自适应方法,在估计SOC的时候,同时也估计系统噪声和量测噪声。根据每一步量测方程的输出,不断地对其修正,从而降低了噪声对估计的影响。自适应卡尔曼滤波系统方程如下:
(24)
(25)
定义wk和vk的均值分别为qk,rk,方差分别为Qk,Rk,它们都是未知的,下面将通过自适应卡尔曼算法对其进行估计。Sage等提出了基于观测量yk的噪声统计极大后验次优无偏估计器,定义H=(FTF)FT,采用指数加权方法,加权系数为βk,使βi=βi-1b,βi=dk-1bi,则极大后验次优无偏估计器为:
(26)
(27)
(28)
(29)
跟常规卡尔曼相比,自适应卡尔曼实现了对噪声的估计,根据噪声的均值和方差不断修正估计值,实现了对状态估计的不断更新。
4.2 用simulink实现算法的SOC估计
用simulink搭建的模型如图3所示。
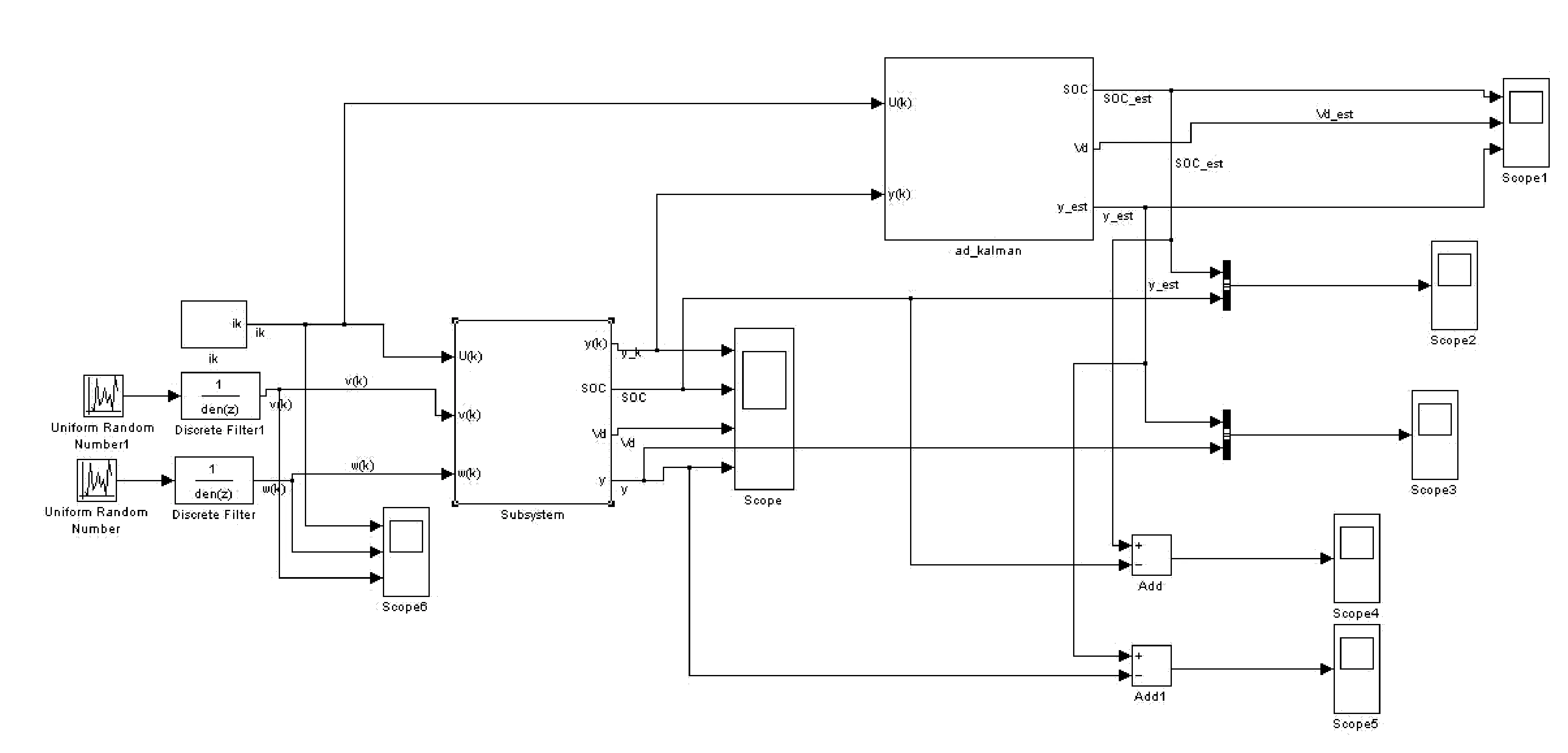
图3 simulink仿真模型
输入为电池的端电压和电流,输出为电池的SOC,ad_kalman模块是进行封装过后的模块。
simulink仿真结果如图4所示。

图4 simulink仿真结果
试验中采用的锂电池的容量为10 A·h ,对其进行一系列充放电试验,工作温度范围为0~40 ℃,充放电设备采用新威尔电子有限公司生产的设备,采样频率为1 Hz。由于开路电压与SOC成线性关系,所以先采用开路电压法得到电池初始的SOC值,在仿真过程中加入高斯白噪声,分别采用卡尔曼滤波算法和自适应卡尔曼算法进行估计,然后与真实值进行比较。利用卡尔曼算法估算得到的误差图如图5所示。

图5 卡尔曼估计的误差图
从图中可以看出,误差范围在1%~9%,自适应卡尔曼算法估算得到的误差图如图6所示。
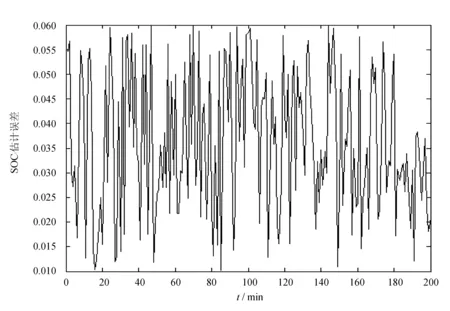
图6 自适应卡尔曼估计与真实值比较得到的误差图
从图中可以看出,误差明显减小,由此可以证明改进的算法可以降低噪声的影响。
5 结 语
首先采用卡尔曼算法进行估计,在此基础上进行了改进,采用自适应卡尔曼估算电池SOC,克服了传统算法的缺点,适用于电动汽车充放电频繁的场合。采用文中提到的设备进行充放电实验,结果表明此方法有较高的精度。另外,此方法工作量小,对硬件环境要求比较低。现在有许多研究者正设计出各种硬件系统,比如基于ARM电池管理系统、基于DSP电池管理系统等,开发出低成本的BMS。但是由于电池内部的复杂化学反应,而且电池的温度、电压、电流等因素在不断的变化,影响电池SOC的估计,所以怎样建立精确的电池模型,是进一步提高SOC精度的重点。
[1] 张利,王为,陈泽坚,等.新能源汽车SOC估算的模糊预测算法研究[J].电子测量与仪器学报,2011,25(4):315-319.
[2] 张利,朱雅俊,刘征宇.锂离子电池SOC与模型参数联合估算研究[J].电子测量与仪器学报,2012,26(4):320-324.
[3] 李新,彭怡,赵晶晶,等.分布式电源并网的潮流计算[J].电力系统保护与控制,2009,37(17):78-81.
[4] 孙逢春,孟祥峰.电动汽车动力电池动态测试工况研究[J].北京理工大学学报,2010,30(3):297-301.
[5] 华周发,李静.电动汽车动力电池SOC估算方法综述[J].电源技术,2013,37(9):1686-1689.
[6] 吴红杰,齐铂金,郑敏信,等.基于Kalnlan滤波的镍氢动力电池SOC估算方法[J].北京航空航天大学学报,2007,33(8):945-948.
[7] 夏超英,张术,孙宏涛.基于推广卡尔曼滤波算法的SOC估算策略[J].电源技术,2007,131(5):414-417.
[8] 林成涛,陈全世,王军平.用改进的安时计量法估计电动汽车动力电池SOC[J].清华大学学报:自然科学版,2006,46(2):247-251.
[9] 刘保杰,王艳,殷天明.电动汽车电池管理系统[J].电气自动化,2010,32(1):60-62,81.
[10] 刑蕾,赵鹏飞.Q-对称熵损失函数下几何分布参数估计[J].长春工业大学学报:自然科学版,2008,29(6):150-152.
[11] 李德东,王振臣,郭小星.基于模糊卡尔曼滤波的HEV氢镍电池SOC估计[J].电源技术,2011,35(2):192-194.
[12] 徐杰.基于卡尔曼滤波的动力电池组SOC精确估计[D].杭州:杭州电子科技大学,2009.
[13] 张頔,马彦,柏庆文.基于自适应卡尔曼滤波的锂离子电池SOC估计[J].汽车技术,2011,32(8):42-50.
Battery SOC estimation
LI Hui1, XIAO Wei1*, LUO Wanbo2
(1.School of Electrical & Electronic Engineering, Changchun University of Technology, Changchun 130012, China;2.Changchun Power Equiprnent General Factory, Changchun 130012, China)
Combining the Kalman filtering with adaptive control, State of Charge( SOC) is introduced into the state equation to establish the battery state equation with two order RC circuit model. The maximal posterior suboptimal unbiased estimator is obtained by means of exponential weighting method to predict the noise. Simulation model is built to verify the feasibility of the algorithm.
state of charge; equivalent circuit model; adaptive Kalman filter algorithm.
10.15923/j.cnki.cn22-1382/t.2017.1.14
2016-07-17
长春工业大学与中国第一汽车股份有限公司技术中心合作项目(W65-GNZX-2016-0009)
李 慧(1973-),女,汉族,吉林长春人,长春工业大学教授,博士生导师,主要从事过程控制与最优控制方向研究,E-mail:lihui@ccut.edu.cn. *通讯作者:肖 伟(1988-),男,汉族,江苏宿迁人,长春工业大学硕士研究生,主要从事信息处理与智能系统方向研究,E-mail:1875569671@qq.com.
TP 202.7
A
1674-1374(2017)01-0073-06
猜你喜欢
电工技术学报(2023年15期)2023-08-10 06:43:38
电气技术(2023年7期)2023-08-08 05:26:36
中国惯性技术学报(2020年2期)2020-07-24 08:41:00
北京航空航天大学学报(2017年9期)2017-12-18 07:12:25
工业设计(2016年4期)2016-05-04 04:00:28
焊接(2016年4期)2016-02-27 13:04:27
电源技术(2016年9期)2016-02-27 09:05:39
西北工业大学学报(2015年3期)2015-12-14 13:08:46
电源技术(2015年1期)2015-08-22 11:16:28
电子设计工程(2014年6期)2014-02-27 11:56:54