
优化BP网络的超声波测距的补偿算法
2017-03-30 05:02:12侯旭东
黑龙江科技大学学报 2017年1期
徐 杰, 侯旭东
(黑龙江科技大学 电子与信息工程学院, 哈尔滨 150022)
优化BP网络的超声波测距的补偿算法
徐 杰, 侯旭东
(黑龙江科技大学 电子与信息工程学院, 哈尔滨 150022)
针对超声传感器在测距方面的局限性, 提出一种基于遗传算法优化的BP网络对函数进行逼近预测,研究超声传感器测距对湿度、温度的补偿。仿真和实验结果表明,该算法可准确预测补偿温度、湿度数据融合后的超声波速度,从而提高井下机器人的避障精度,增强其稳定性与安全性。该研究可为井下机器人的避障系统设计提供参考依据。
井下机器人; 超声测距; 避障; BP
矿井开采经常会发生矿难,对人员生命和公共财产造成巨大损失。矿难发生后井下环境非常复杂,存在漏水、瓦斯爆炸、能见度低等问题[1]。为尽可能减小损失,救援机器人先下井是最佳选择。此时井下空间不足,障碍物多,因此救援机器人的前部要设有避障模块,模块设计由五组超生传感器构成。
超声波传感器虽然有成本低、穿透力强等优点,但井下环境非常复杂。不仅温度会随着矿井的深度增加而增加,湿度也会因为涌水呈无规律变化[2]。根据实验测量得出,在温度不变的情况下,湿度在0~5%之间,超声波速度会有55 m/s左右的偏差[3]。井下机器人工作环境不稳定,以致超生波传感器测量的距离与实际距离有较大偏差。因此,文中提出使用经过遗传算法优化的BP神经网络对温度和湿度信息进行融合,以期得到精确的超生波速度,从而测得机器人和障碍物间的精确距离。
1 遗传算法优化的BP网络
BP(Back Propagation)神经网络是一种多层前向型神经网络[4]。信号是从输入端一直向前传输,网络的输出值与实际值之间的误差是逆向传输的。该网络在处理比较简单问题的情况下,只有输入层、隐层、输出层三层构成,可对非线性函数进行拟合逼近[5]。
遗传算法(Genetic Algorithms,GA)是由Holland在1962年提出的是一种效仿自然界中生物为了生存而相互竞争、进化的方法。该方法可在全部数据中选取出与系统最为契合的数据[6]。
使用GA优化BP网络的流程如图1所示。该优化过程主要分为三步:一、确定神经网络的具体结构,以便得到网络中权值和阈值的个数;二、应用GA给出网络的初始权值、阈值,对网络进行训练直到满足期望误差;三、利用训练好的满足要求的网络,对需要操作的数据进行拟合或者分类。上述三个步骤中,可以根据第一步给出GA的个体长度,其长度为网络权值与阈值个数之和。之后对个体进行一系列GA操作,从而得出一个对系统(网络)最合适的个体[7]。
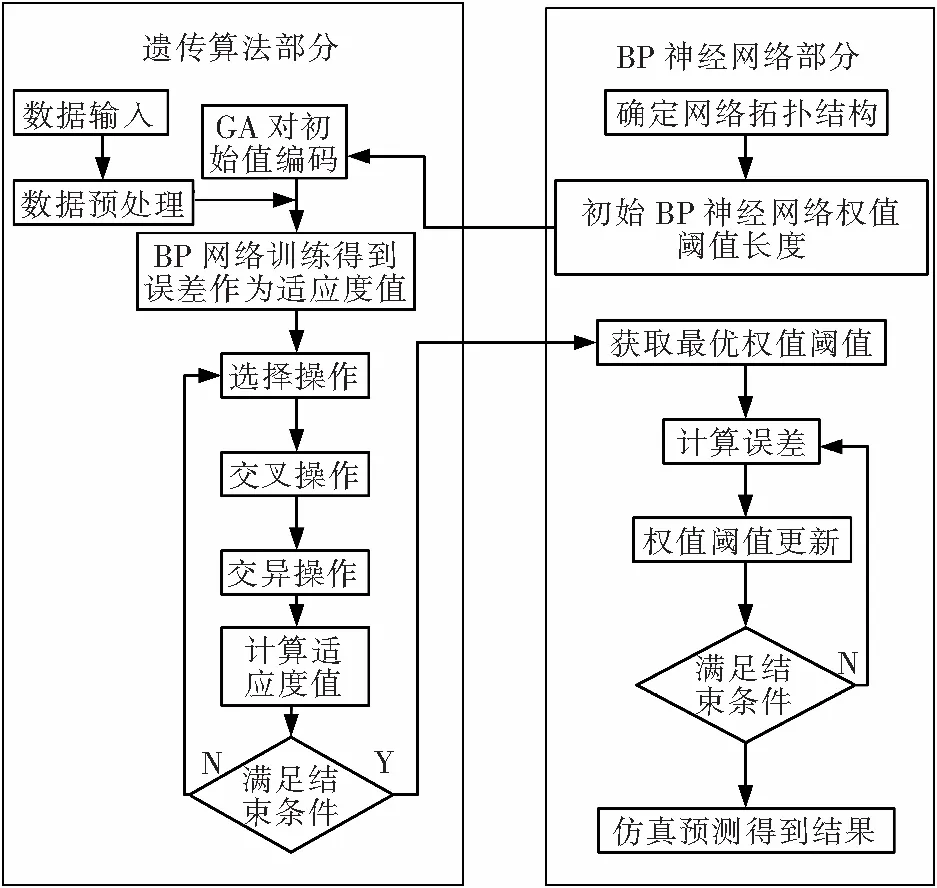
图1 采用遗传算法优化的BP网络算法流程
Fig. 1 Optimization algorithm of BP neural network based on Genetic Algorithm
2 基于优化网络的数据融合
2.1 优化神经网络的实现
在GA的种群中每个个体都是由数字组成,这组数字与网络中的权值、阈值一一对应[8]。利用GA得到最终的个体后,结合网络结构,可以得到一个完整的待训练网络,训练该网络得出最优权值、阈值。
利用该神经网络对数据进行分类或者拟合,得到一个网络拟合输出,用该网络拟合输出与测试数据对应的实际输出做差,在对结果绝对值化,这个最终的结果就是种群中个体的适应度[9]。计算公式为
式中:q——网络输出个数;wa——BP神经网络第a个单元的预测输出;S——任意常数。
针对GA的选择过程有多种方法,文中选用轮盘赌法。根据上述求个体适应度的过程,可以得到种群中任意一个个体m的选择概率rm为:
其中,Im是个体m的适应度,在该条件下设定适应度小的个体存活的概率较高,所以要在GA的选择过程未开始时对其求倒数。N是种群中所有个体的总和。
因为每个个体都是由一串数字组成,所以GA的交叉过程使用实数交叉法,设第p个遗传片段Up和第o个遗传片段Uo在f的位置发生交叉,则
选中第k个个体的第e个遗传片段Uke产生突变,其过程为
式中:Umax——遗传片段Uke的上界;Umin——基因Uke的下界;d(h)——变异概率,d(h)=c2(1-h/Hmax)2;c2——实数;h——遗传一代的次数;Hmax——遗传的最大代数;c——[0,1]间的随机数。
2.2 获取样本数据
以实验室的环境为基础搭建简易的温度、湿度控制检测系统,可以得出不同温湿度条件下的超声波速度v′,如表1所示。其中,v为只进行了温度补偿后的超声波速度。由此可见,在实际应用中仅进行温度补偿计算是不精确的,很容易导致机器人发生碰撞。
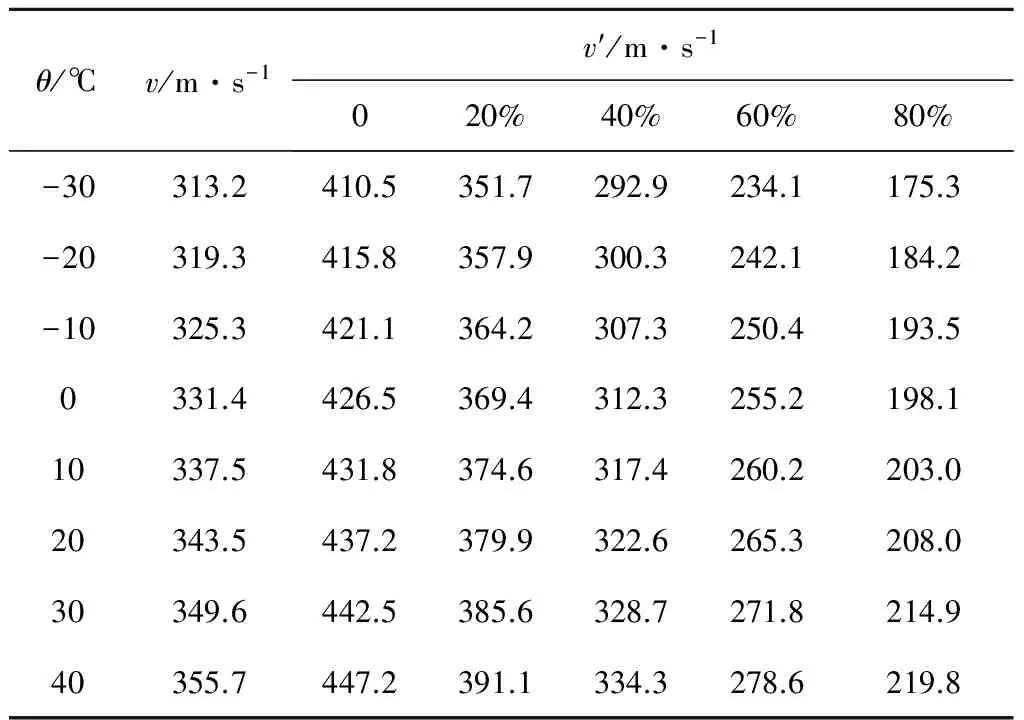
表1 实验所需数据
2.3 融合的具体实现
由于该网络为双输入单输出,所以隐层单元数定位10,隐层激活函数选用”tansig”,输出层激活函数选用“purelin”。其结构如图2所示。
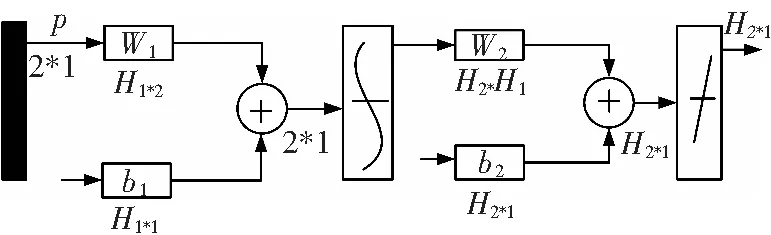
图2 BP网络结构
图2中,p为输入,W1为输入层与隐层间的权,H1为隐层单元数,W2为隐层与输出层之间的权,H2为输出层单元数,b1为隐层阈值,b2为输出层阈值[10]。所以网络的初始化为:
net=newff(p,t,10);
net.iw{1,1}=W1;
net.iw{1,2}=W2;
net.b{1}=b1;
net.b{2}=b2。
因为井下温度在30 ℃左右时居多,所以采用30 ℃时的数据作为测试数据,其余数据作为训练数据。训练过程如图3所示。

图3 网络训练过程
经过训练网络的权值、阈值达到最优范围,输入层到隐藏层之间20个权值的范围为[-0.728 6,0.750 6],隐藏层到输出层间10个权值在[-0.681 1,0.750 6],隐藏层的10个阈值范围在[-1.684 2,1.801 2],输出层的一个阈值为0.914 5。得到符合误差标准的网络后,使用30 ℃时不同湿度下的数据对网络进行测试仿真,结果如表2所示。由表2可以看出,网络输出预测值vy与实际超声波速度接近,精度较高。
表2 30 ℃不同湿度下超声波速度
Table 2 Ultrasonic velocity at 30 ℃ in different humidity environment
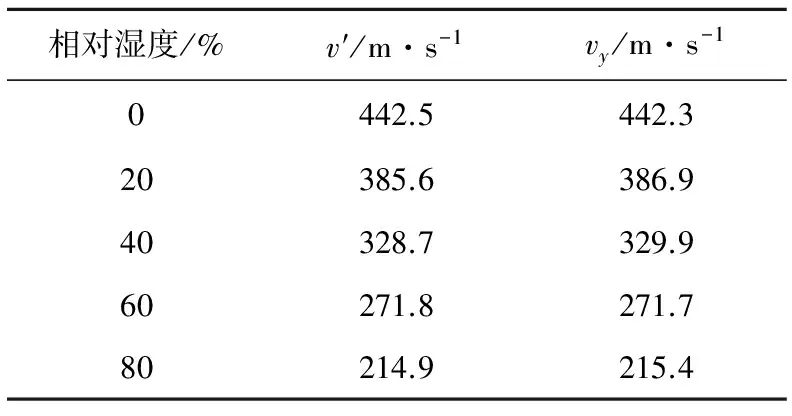
相对湿度/%v′/m·s-1vy/m·s-10442.5442.320385.6386.940328.7329.960271.8271.780214.9215.4
3 算法应用
在井下不同深度,采用已有的声速温度拟合公式,超声波测距测量值与实际值见表3。从表3可以看出,实际值均大于测量值,表明在测量中单一的考虑温度不能满足井下机器人的精度要求。
文中将符合误差标准的基于GA优化BP网络添加到井下机器人的避障系统中,对不同环境下不同温度、湿度的超声波速度进行补偿,得出的超声波速度经渡越时间法运算得到距离,结果如表4所示。由表4可知,加入经过训练网络系统的输出精度较表3至少提高了两个量级。
表3 井下不同深度相同距离的测量值
Table 3 Downhole measurements of same distance at different depths
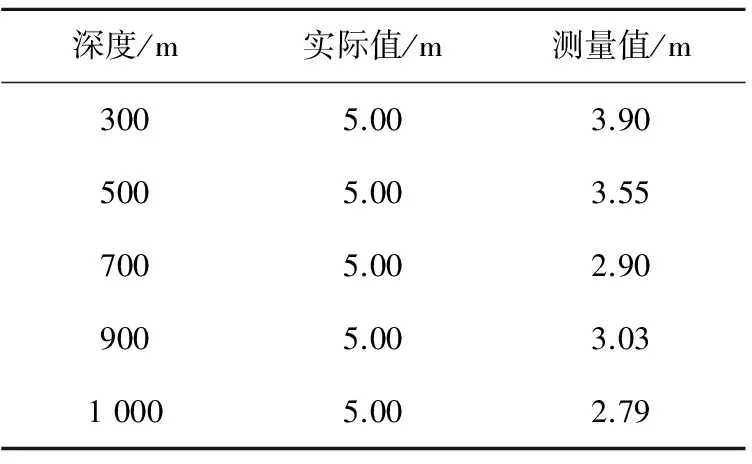
深度/m实际值/m测量值/m3005.003.905005.003.557005.002.909005.003.0310005.002.79
表4 超声波测距测量值与实际值比较
Table 4 Comparison of actual value and meas- ured value after adding BP network
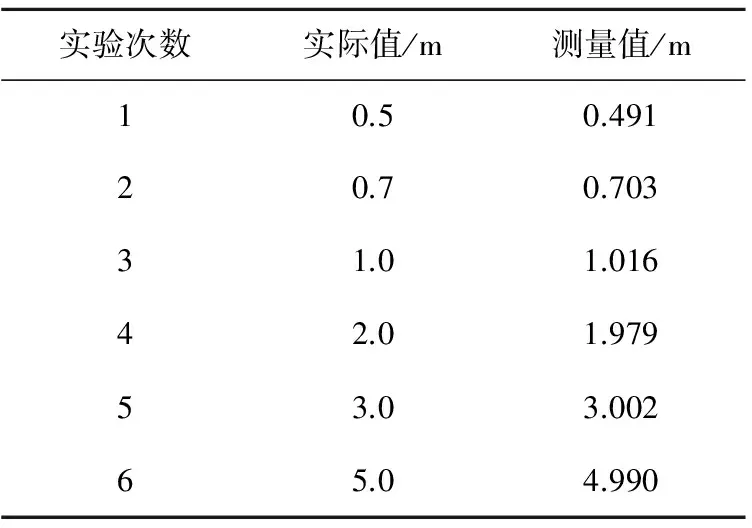
实验次数实际值/m测量值/m10.50.49120.70.70331.01.01642.01.97953.03.00265.04.990
4 结束语
温度和湿度是影响超声波传感器测距的主要因素。数值仿真和实验表明,在井下温度、 湿度变化的环境中, 文中提出的基于GA优化的BP网络,对超声波传感器测距精度有很大提升。加入网络后系统的计算精度有较大提高,且成本并未有很大改变,因此,该算法有较大的实用价值。
[1] 陈 升. 矿难救援机器人的发展应用现状与未来趋势[J]. 机械制造, 2015, 4: 86-87.
[2] 宋清华. 面向矿井灾难救援的机器人控制系统设计研究[J]. 科技创新与应用, 2015, 10: 66-66.
[3] 赵 波, 田建学, 魏俊淦. 一种无线电高度表模拟器的设计[J]. 仪表技术, 2015(05): 24-26.
[4] 肖 丹, 孙 鹏, 邱革飞. BP神经网络与遗传算法的变压器风险评估[J]. 云南电力技术, 2012(05): 20-24.
[5] 王社国, 田志民, 武莎莎. 改进BP神经网络在煤与瓦斯突出预测中的应用研究[J]. 矿山机械, 2014(05): 116-119.
[6] 彭基伟, 吕文华, 行鸿彦, 等. 基于改进GA-BP神经网络的湿度传感器的温度补偿[J]. 仪器仪表学报, 2013(01): 153-160.
[7] Gamal Eimasry, Sergio Cubero, Enrique Moltó. In-line sorting of irregular potatoes by using automated computer-based machine vision system[J].Journal of Food Engineering, 2012, 7(112): 60-68.
[8] 李允旺, 葛世荣, 朱 华. 煤矿救灾机器人应用探讨[J]. 煤矿机械, 2009, 30(1): 164-167.
[9] Cai Wenbin, Zhu Qingbao, Hu Jun. Path planning based onbiphasic ant colony algorithm and fuzzy control in dynamic en-vironment[C]// 2010 2nd International Conference on Intelli-gent Human-Machine Systems and Cybernetics Hangzhou: IEEE Press, 2010: 333-336.
[10] 孙昌立, 朱荣华. 铝合金弯曲损伤实验与BP神经网络识别[J]. 黑龙江科技大学学报, 2012, 22(06): 589-592.
(编校 王 冬)
Genetic algorithm-based ultrasonic sensor ranging compensation algorithm for optimization of BP neural network
XuJie,HouXudong
(School of Electronics & Information Engineering, Heilongjiang University of Science & Technology, Harbin 150022, China)
This paper describes an effort to overcome the limitation of the ultrasonic sensor in the ranging application aspects using an optimized back-propagation(BP) network based on genetic algorithm for the approximate prediction of function and an insight into humidity and temperature compensation for ultrasonic sensor ranging. The simulation shows that the algorithm enables a more accurate prediction of the ultrasonic velocity following the combination of the compensation temperature and humidity, thus improving the precision at which the underground robots avoid obstacles and providing a greater stability and security. This study may provide a reference for designing obstacle avoidance system for pit robots.
pit robot; ultrasonic ranging; obstacle avoidance; BP
2016-12-13
黑龙江省自然科学基金面上项目(F200921)
徐 杰(1964-),女,山东省寿光人,教授,硕士,研究方向:视觉成像与图像处理,E-mail:xujie640101@163.com。
10.3969/j.issn.2095-7262.2017.01.019
TP242.2; TP183
2095-7262(2017)01-0087-04
A
猜你喜欢
科学大众(2023年21期)2023-12-05 05:23:22
成都信息工程大学学报(2022年3期)2022-07-21 09:35:04
中国特种设备安全(2021年9期)2021-03-02 05:40:28
沈阳师范大学学报(教育科学版)(2021年2期)2021-02-01 07:00:46
科学(2020年3期)2020-01-06 04:02:51
测控技术(2018年9期)2018-11-25 07:44:34
电子制作(2017年7期)2017-06-05 09:36:13
自动化学报(2017年7期)2017-04-18 13:41:02
时代英语·高二(2015年2期)2015-05-18 00:08:23
浙江理工大学学报(自然科学版)(2015年5期)2015-03-01 02:53:55
