节流管汇节流压力控制模糊自适应回馈仿真
2017-03-29 05:00张方舟王雪珊
计算机技术与发展 2017年3期
张方舟,李 龙,王雪珊
(东北石油大学 计算机与信息技术学院,黑龙江 大庆 163318)
节流管汇节流压力控制模糊自适应回馈仿真
张方舟,李 龙,王雪珊
(东北石油大学 计算机与信息技术学院,黑龙江 大庆 163318)
在现代石油与天然气勘探开发的过程中,为了防止井喷必须对职工进行技术培训,以提高现场作业人员的专业水平和操作技能。为了给培训人员创造与真实相近的钻井环境并客观反映培训人员的技能水平,针对井控实物仿真培训系统中的节流管汇节流压力调节操作进行了仿真,通过在节流管汇的控制管线上安装电磁比例阀控制管线中液压油流量和流动方向实现节流压力的精确控制;根据系统的特性,结合传统PID控制算法,将模糊推理和神经网络应用到控制系统中,提出了节流压力模糊自适应回馈算法。为了验证该方法的可行性,选取大庆钻探工程公司的实际项目为背景进行仿真实验。实验结果表明,所提的方法能够实现节流管汇节流压力调节的真实操作和训练功能,节流压力模糊自适应回馈算法具有较好的抗干扰能力,在模拟及训练过程中发挥了重要作用。
节流管汇;模糊控制;PID自适应;仿真
0 引 言
在石油天然气钻井中,节流管汇的节流压力控制是保证钻井安全、保护自然环境及地下资源的重要技术课题。在常规钻井过程中,当地层压力和井眼环空流体柱压力平衡关系被破坏时,地层流体就可能侵入到井眼环空钻井液中,导致溢流,甚至引发井喷事故,因此必须及时进行压井控制[1]。目前,针对节流压力调节安全操作的培训方式大部分是教师讲解,观看录像,上井实践以及虚拟仿真等集中式培训,这些培训方式存在培训成本高、周期长、培训手段单一枯燥、效果有限、工学矛盾突出等弊端[2]。
为此,针对以上问题研发了与实际生产工况密切相关且操作性极强的井控实物仿真培训系统。为实现采油井控现场场景的逼真再现,该系统将文字、3D动画、声音等多种表现形式有机融合。在节流压力模糊自适应仿真系统设计中,将现有的蓄能器压力表、管汇压力表等压力信号仪表改为电信号仪表,使连续的气动压力信号转换为离散的电信号,安装解码器记录各个平板阀的操作状态,在节流管汇的控制管线上安装电磁比例阀来完成节流阀的开度调节。将传统的PID控制算法、模糊推理、神经网络相结合,设计出节流压力模糊自适应回馈算法来控制电磁比例阀,通过电磁比例阀控制管线中液压油流量和流动方向实现液动节流阀的开度实时调节以完成节流压力的精确控制。
1 节流管汇
节流管汇是控制井口回压和井内流体,实施油气井压力控制的可靠且必要的设备。在油气钻井过程中,当井筒中的钻井液被地层流体污染时,就会破坏钻井液静液柱压力和地层压力之间的平衡关系,从而导致溢流。发生事故后,在循环出被污染的钻井液和泵入高密度钻井液重新建立井内压力平衡关系的过程中,可以利用节流阀控制井口回压维持一定的井底压力,避免地层流体更进一步侵入,减少事故带来的损失[3]。节流管汇除了约束流体流动的管道外,还包括各种控制流体流动的阀门,主要有平板阀和节流阀。平板阀只有“通流”或“断流”两个状态,在节流管汇中起到了选择不同流通路径的作用。节流阀是节流管汇的核心控制部件。在压井过程中,在泥浆的排量保持不变的情况下,必须保证井底压力始终大于地层压力。井底压力等于井筒内液柱压力和井口压力之和,当井底压力小于要求的压力时就需要依靠手动或液动节流阀调节节流管汇的流道面积大小,以实现对节流压力的控制,进而保证井底压力在一定的范围内变化,保持压力平衡[4]。
2 基于节流压力调节的闭环回馈控制系统
该系统针对钻井井控设备节流管汇中液动节流阀的开度、节流压力、操作者的视角等信息进行采集。传感器采集到的电信号先通过PLC控制系统进行整理、分析以及逻辑判断,然后在以专业书籍和现有的钻井井控教程为蓝本的评分系统中进行数据运算,并将运算结果通过PLC控制系统输出到电流表上,实时地显示操作者的操作结果并给出相应的操作成绩。为使改造后的实物仿真系统的工况能够逼近真实操作工况,设计了一种适合节流管汇节流压力调节过程的模糊自适应稳态回馈仿真算法。在算法的实际运算过程中,液动节流阀是被控制对象,节流阀的进口压力是被控参数。在节流管汇的控制管线上安装电磁比例阀,通过电磁比例阀控制管线中液压油流量和流动方向实现液压缸活塞杆的位移控制。由于液压缸活塞杆连接着液动节流阀的阀心,因此可以通过控制液压缸中的活塞杆位移实现液动节流阀的开度调节,从而控制井口回压。
2.1 节流压力调节过程PID算法的建立
在井控培训过程中,节流压力调节是重要的一个培训项目,其迅速、精准地调节节流压力关系到井控操作的安全[5]。使用传统的PID算法进行节流压力控制,如下所示:
(1)
其中,KP为比例系数,用以控制系统偏差,提高系统的响应速度和精度;TI为积分系数,用以消除控制系统的静态误差,提高控制系统的无差度;TD为微分系数,用以改善具有较大惯性的被控对象即液动节流阀的动态性能,进而提高此系统抗干扰的能力。
节流压力调节过程中采用的是数字式的采样控制方式,它与模拟式控制器的区别在于不能做到连续输出控制量,实现对液动节流阀开度的连续控制;而仅仅只能基于采样时刻的系统偏差值计算出系统控制量,实现对液动节流阀的开度进行离散控制。因此,在式(1)中涉及到的微分项与积分项,在计算机上可利用数值计算进行无限近似值计算[6]。若假设采样周期为时间T,则连续时间t由离散采样时刻点Ti来代替,积分由和式来代替,微分项由增量来替换,即可做出如下变换:
(2)
将式(2)代入式(1)中,即可得到离散控制的近似表达式:
(3)
其中,ei为PID系统第i个采样时刻的输出偏差;u0为初始控制常量;ui为第i个采样时刻的输出值。
如果系统采样周期T足够小,则连续控制过程与被控制过程无限接近,使上述近似过程的计算相对准确。基于式(3),可计算出PID控制器的第i-1个采样时刻的值ui-1,则可由此计算出增量式PID算法:

(4)
将式(3)与式(4)相减可计算出增量式PID控制算法的表达式:

(5)
由于压力控制具有反应迅速、计算时间短、实时性强等特点,为减少计算时间,提高运算效率,可将式(5)进行整理,改写成:

(6)
需进行PID参数调整时,每次调整都需要计算一次a0,a1和a2。因此,还可将式(5)写为:

(7)
由式(7)可得,增量式算法相比位置式算法,工作量较小、计算时间较短,进行推导计算只需保留所求值前三个时刻的偏差值,因此增量式算法适合复杂的节流压力控制过程的回馈仿真。
2.2 节流压力模糊自适应稳态回馈仿真算法
节流压力的控制是一个数学控制模型不确定且大滞后的系统。因此,在系统的实际运行过程中,当参数发生变化时,仍采用传统的固定参数的PID控制器就很难达到理想的控制效果。现在常采用PID的控制参数实时在线整定的方法来提高系统的控制效果[7]。近年来,智能方法尤其是模糊推理和神经网络得到了广泛关注[8]。但是采用模糊推理改进的PID控制器,在模糊规则的归纳和模糊隶属度函数的选取过程中,主要还是依靠个人经验,使得控制器具有较大的主观性。同时采用BP神经网络改进的PID控制器,由于BP神经网络隐层的节点数的选取无规律,导致其计算量大、收敛速度慢等缺点,无法满足在线调整参数的实时性要求[9]。
模糊神经网络兼备了模糊推理和BP神经网络的优点,其强大的逻辑表达能力和自身参数调整优化能力使得它在大滞后性、强非线性且自身数学控制模型不易得到的复杂系统中被大量应用[10-11]。该系统提出模糊自适应回馈仿真算法是在传统PID算法的基础上,使用神经网络来完成PID控制参数的模糊化,模糊推理,解模糊化等工作。
模糊自适应节流压力控制器的原理如图1所示。
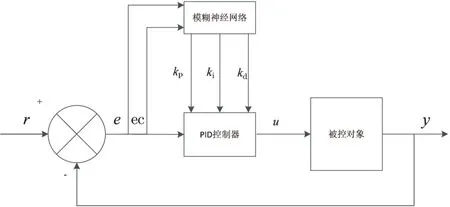
图1 模糊自适应节流压力控制器的工作原理
系统中r是系统的理想输出值,y是系统的实际输出,e是理想输出跟实际输出的误差,u是PID控制器的输出。模糊神经网络输出kp,ki和kd三个参数到PID控制器上[12]。该系统是在传统PID控制器的基础上,实现PID参数的实时在线自整定功能。具体的工作原理是以偏差e和偏差变化率ec与被控参数PID的三个参数之间的模糊规则作为模糊推理的依据,利用模糊神经网络和模糊推理实现kp,ki和kd的在线整定,以满足不同时刻e和ec对控制参数的需求,从而使被控对象具有良好的动态性能,达到提高系统控制效果的目的。
模糊自适应节流压力控制器的工作流程如图2所示。
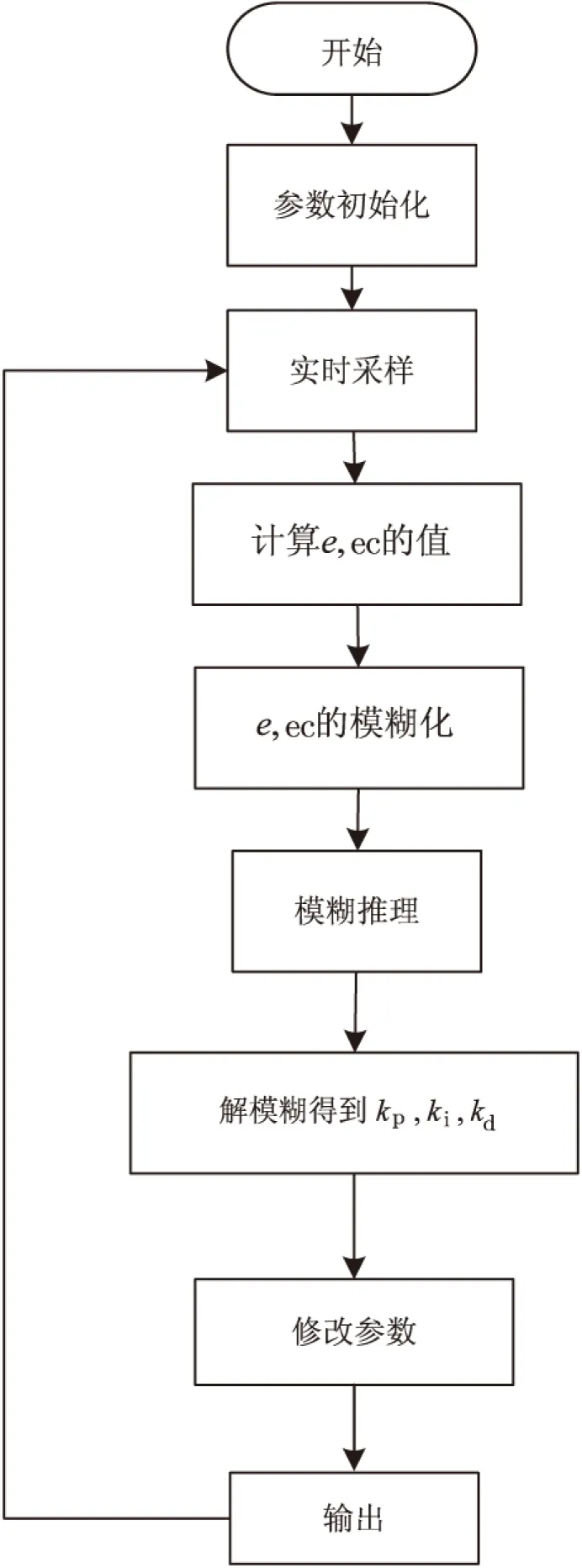
图2 模糊自适应节流压力控制系统的工作流程
节流压力控制系统在运行过程中,模糊神经网络控制器根据相应压力传感器实时采集节流管汇中的节流压力,并结合计算机内部的模糊逻辑规则知识库进行实时比对分析、查表和运算分析,形成对应的模糊推理决策供神经元进行权值调整修正。
2.3 模糊神经网络自整定PID的原理与算法
模糊神经网络自整定PID算法的网络结构如图3所示。本系统采用模糊神经网络共有输入层、模糊化层、模糊推理层和输出层4层。
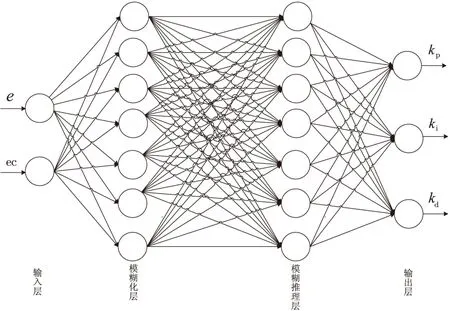
图3 模糊神经网络的网络结构
模糊神经网络将系统误差e和误差变化率ec作为输入量,输出为3个节点,即kp,ki和kd[13-14]。系统设计的模糊神经网络有4层,各层具体描述如下:
(1)输入层:该层的输入为误差e和误差变化率ec,选取的活化函数为f(x)=x,因此该层的作用只是把系统的e和ec输出给下层。
(2)模糊化层:该层有7个节点,分别将两个输入划分到7个模糊集合中,即对输入的e和ec进行模糊化,用隶属度函数分别计算两个输入对于7个模糊集合的隶属度。该层中的7个节点分别表示模糊集合中的[NB,NM,NS,ZO,PS,PM,PB],其中元素分别代表了负大,负中,负小,零,正小,正中,正大。该层的隶属度函数为:
(8)
其中,i=1,2,j=1,2,…,7;cij和bij分别是高斯函数的第i个输入变量的第j个模糊集合隶属度函数的均差和标准差。
(3)模糊推理层:该层有7个节点,它们各代表一种模糊推理规则。该层作用是将上层中的两个模糊输入两两相乘,得到此层的输出值。因此,该层的活化函数输出为:
(9)
(4)输出层:这一层输出是PID控制器的3个参数,该层与上一层有一个连接权值矩阵w。该层的输出为:
(10)
2.4 模糊神经网络的学习算法
由于节流压力控制系统的参数是时变的、非线性的,因此,神经网络需要随时对权值进行调整,也就是对模糊规则进行调整。该系统定义的性能指标函数为:
(11)
其中,rin(k)和yout(k)分别表示系统的理想输出和实际输出。
系统采取最速下降法对网络的权值系数进行修正,即按照性能指标函数的负梯度方向进行搜索,同时附加一个全局极小惯性项提高算法的收敛速度。
Δwij(k)的学习算法为:
(12)
其中,η为学习速率;α为惯性系数。

(13)
同理可求出模糊化层中心向量Δbj(k)和基宽向量Δcij(k):

(14)

(15)
3 仿真分析
为了验证所建立的模糊自适应控制器是否能够适应节流压力调节系统的多元动态时变,同时满足实时响应调节的要求,使用Matlab软件中的Simulink神经网络工具箱进行仿真[15],选取节流压力调节系统被控对象的传递参数为:
(16)
其仿真结果如图4所示。其中,曲线1为常规PID控制算法,曲线2为模糊自适应回馈算法。
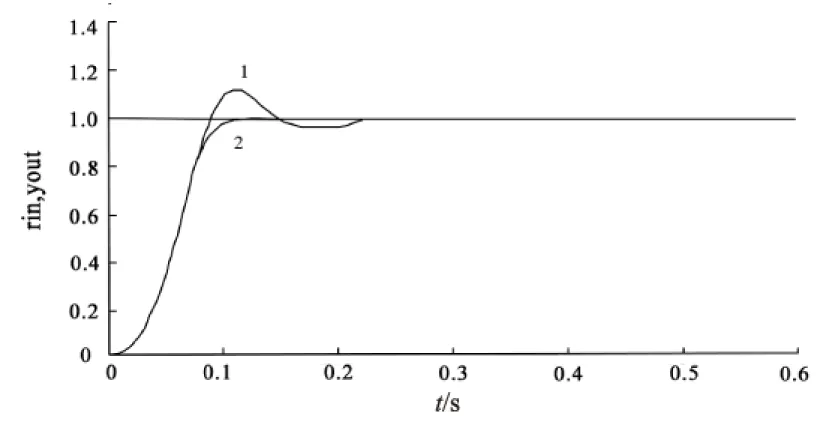
图4 不同控制算法的响应曲线
从图4的2条响应曲线比较可知,使用模糊神经网络对常规PID控制算法调节优化后,整个控制器的收敛速度、控制超调量、鲁棒性以及动态响应时间等方面均有了很大改善,表明此控制器比常规PID控制算法具有更好的动态性能。
为了验证经优化后控制器是否具有良好的收敛性和较强的鲁棒性,在仿真运行的第360ms,给整个节流压力调节系统外加一个幅值为0.4的负载干扰,获得的不同稳定收敛仿真曲线如图5所示。
其中,曲线1为常规PID控制算法,曲线2为模糊自适应回馈算法。
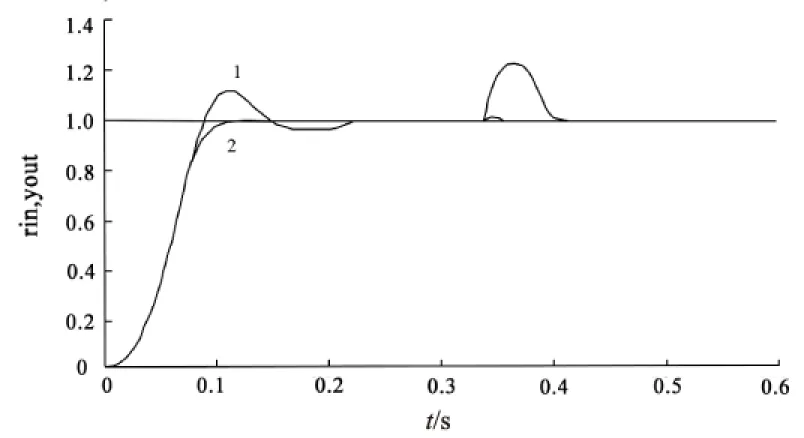
图5 添加干扰后不同控制算法的响应曲线
通过响应曲线对比可以看出,当对系统附加一个外部负载干扰后,经过优化后的PID控制器可以在模糊神经网络自适应调节作用下使得系统很快恢复平衡,说明此节流压力调节系统受负载干扰的影响较小,鲁棒性明显优于传统的PID控制器。
4 结束语
为了完成对井控实物仿真培训系统节流压力调节过程中液动节流阀调节节流压力操作的仿真,在深入研究了节流管汇的工作原理并分析节流压力调节过程的基础上,通过在节流管汇中加装电磁比例阀控制液压油的流向和流量的方式实现了节流管汇的压力控制仿真操作。在实现过程中,针对节流压力闭环回馈控制系统参数的不确定性和扰动性,提出了节流管汇节流压力模糊自适应回馈算法。为验证该方法的可行性,以大庆油田钻探工程公司井控设备为仿真实例,对井涌控制的实际操作流程进行了MATLAB/Simulink仿真。结果表明,所采用的模拟方法可较好地实现节流管汇节流压力调节的真实操作过程和训练功能,所提出的算法可较好地适应节流压力调节过程中的参数变化,具有很强的抗干扰能力,有效地提高了实物仿真系统的动态性能。
[1] 石油天然气钻井井控编写组.石油天然气钻井井控[M].北京:石油工业出版社,2008.
[2] 田 岚.石油天然气钻井工程风险识别与评价方法[J].钻采工艺,2010,33(2):31-33.
[3] 集团公司井控培训教材编写组.中国石油化工集团公司井控培训教材:井下作业技术、管理人员井控技术[M].东营:中国石油大学出版社,2013.
[4] 周英操,崔 猛,查永进.控压钻井技术探讨与展望[J].石油钻探技术,2008,36(4):1-4.
[5]SantosHM,MuirKJ,SonnemannP,etal.Optimizingandautomatingpressurizedmudcapdrillingwiththemicro-fluxcontrolmethod[R].[s.l.]:[s.n.],2008.
[6] 刘金琨.先进PID控制及其MATLAB仿真[M].北京:电子工业出版社,2005:203-206.
[7]YukitomoM,ShigemasaT,BabaY,etal.AtwodegreesoffreedomPIDcontrolsystemitsfeaturesandapplications[C]//Proceedingsofcontrolconference.[s.l.]:[s.n.],2004:112-121.
[8] 王 伟.智能控制的发展趋势与展望[J].精密制造与自动化,2008,33(3):4-6.
[9] 杨雄文,周英操,方世良,等.控压钻井分级智能控制系统设计与室内试验[J].石油钻探技术,2011,39(4):13-18.
[10]WuBaogang,YingHao.Reviewoffuzzy-PIDcontroltechniquesandsomeimportantissues[J].ActaAutomaticaSinica,2001,27(4):567-584.
[11] 殷云华,樊水康,陈闽鄂.自适应模糊PID控制器的设计和仿真[J].火力与指挥控制,2008,33(7):96-99.
[12] 程启明,陈 刚,王勇浩.一种模糊神经网络控制系统研究[J].系统工程与电子技术,2005,27(3):501-504.
[13] 黄友锐,曲立国.PID控制器参数整定与实现[M].北京:科学出版社,2010:5-15.
[14] 徐春梅,尔联洁,刘金琨.动态模糊神经网络及其快速自调整学习算法[J].控制与决策,2005,20(2):226-229.
[15]SoyguderS,KarakoseM,AlliH.Designandsimulationofself-tuningPID-typefuzzyadaptivecontrolforanexpertHVACsystem[J].ExpertSystemswithApplications,2009,36(3):4566-4573.
Fuzzy Adaptive Feedback Simulation of Choke Manifold Throttle Pressure Control
ZHANG Fang-zhou,LI Long,WANG Xue-shan
(College of Computer and Information Technology,Northeast Petroleum University,Daqing 163318,China)
In order to prevent the well blowout in the process of modern oil and gas exploration and development,the technical training for workers is necessary to improve professional standards and skills of on-site workers.The simulation of choke manifold throttle pressure adjustment operation for well control loop simulation training system has been carried out,which could produce a close to real drilling environment for trainees and objectively reflect the skill level of the them.The electromagnetic proportional valve is installed on the control line of choke manifold,and the precise control of throttle pressure is realized with it for both the controls of hydraulic oil flow and its direction.According to the system’s characteristics,traditional PID control algorithm has been merged into the simulation method proposed,which is to employ fuzzy reasoning and neural network in the control system,and thus a throttle pressure fuzzy adaptive feedback algorithm has been achieved and presented for the simulation.In order to validate the feasibility of the method proposed,an actual project of drilling engineering company in Daqing has been taken as an example for the simulation calculation.Experimental results show that it can achieve the actual training functionality of choke manifold throttle pressure adjustment operation and the throttle pressure fuzzy adaptive feedback algorithm plays an important role in the process of simulation and training since its better anti-interference capacity.
choke manifold;fuzzy control;PID adaptive;simulation
2016-04-27
2016-08-11
时间:2017-02-17
中国石油天然气集团公司重大专项“重大工程关键技术装备研究与应用项目”(2013E-38-09);黑龙江省高等教育教学改革项目(JG2013010153)
张方舟(1973-),男,博士,教授,研究方向为计算机网络安全、计算机仿真;李 龙(1992-),男,硕士,研究方向为计算机应用技术。
http://www.cnki.net/kcms/detail/61.1450.TP.20170217.1632.066.html
TP31
A
1673-629X(2017)03-0147-05
10.3969/j.issn.1673-629X.2017.03.030
猜你喜欢
东北电力技术(2022年7期)2022-08-26
选煤技术(2022年2期)2022-06-06
现代制造技术与装备(2022年4期)2022-05-28
石油机械(2022年2期)2022-02-28
湖北工业大学学报(2021年2期)2021-04-28
宇航学报(2020年4期)2020-05-21
石油研究(2019年2期)2019-09-10
科学与技术(2019年12期)2019-03-29
兵工学报(2018年4期)2018-05-14
北京航空航天大学学报(2017年1期)2017-11-24