
长线列红外探测器双模式成像装置中的摆镜控制系统设计
2017-03-27 09:02:16张若岚刘芸邑田桂平
红外技术 2017年1期
魏 伟,陈 洁,张若岚,刘芸邑,田桂平
长线列红外探测器双模式成像装置中的摆镜控制系统设计
魏 伟1,2,陈 洁1,2,张若岚1,2,刘芸邑1,2,田桂平1,2
(1.昆明物理研究所,云南 昆明 650223;2.于起峰院士工作站,云南 昆明 650223)
为了实现长线列红外探测器双模式成像装置的两种工作模式,需要在成像装置中增加摆镜控制系统,而高速扫描时的扫描线性度和静止时的位置稳定精度是本系统设计的关键因素。本文着重论述了摆镜控制系统的整体设计和指标要求,基于这些指标,提出了一种高线性和高稳定精度摆镜控制系统的实现方案。并利用Simulink进行了仿真,验证该方案切实可行。
摆镜控制系统;扫描线性度;位置稳定精度;Simulink仿真
0 引言
长线列红外探测器双模式成像装置有前视模式和搜索模式两种工作模式,其中前视模式用来对特定目标进行识别、跟踪与瞄准,搜索模式用来进行固定角速度的空域目标搜索[1]。其工作示意图如图1和图2所示。当前视模式启动时,内部扫描电机开始工作,在热像单帧积分周期内进行固定视场的像方扫描,获得前方特定狭窄视场内二维场景的高分辨热图像;积分间隙期间则快速回扫,准备下一帧扫描。当搜索模式启动时,内部扫描电机停止像方扫描并将摆镜稳定在光轴零位位置,配合系统周视成像,完成目标的搜索,为上级系统提供目标信息。
当前采用288×4型短线列焦平面探测器的双模式成像装置已趋于成熟,随着768×8型长线列焦平面探测器制作材料和加工工艺水平的提高,将该类探测器应用到双模式成像装置中成为了当下研究的热点。而采用768×8型长线列探测器的双模式成像装置对摆镜控制系统的扫描线性度和静止稳定精度提出了新的要求,为了满足这些指标要求,本文提出了一种高线性和高稳定精度摆镜控制系统的实现方案。
1 整体设计
摆镜控制系统由驱动电机、摆镜、伺服控制电路、角位置传感器等部件组成[2],其结构框图如图3所示。由于成像装置采用了长线列探测器,所以其在前视工作模式下对扫描指标提出了新的要求:①由调制传递函数MTF的计算公式可知,对于级的TDI器件,随着级数的增加,摆镜扫描线性度的指标要求也相应增加[3],采用768×8型探测器的扫描成像装置,要求扫描线性度应达到0.2%;②与常规的288×4型探测器相比,768×8型探测器的焦平面面积变大,为了使摆镜可以覆盖面积变大的焦平面,摆镜控制系统的扫描角度增大[4],采用768×8型探测器的扫描成像装置,要求扫描角度应达到±6.5°;③其他的常规扫描指标还有扫描效率达到80%,扫描工作频率为30Hz等。同时,采用长线列探测器的成像装置在搜索工作模式下对静止稳定度的指标也提出了新的要求,为了避免景物在探测器像元上移动过大造成图像模糊,采用768×8型探测器的成像装置,摆镜的静止稳定精度应优于5″。

图1 前视模式工作示意图

图2 搜索模式工作示意图

图3 摆镜控制系统结构框图
为了满足上述的指标要求,就要考虑以下3个方面:①部件选型,基于摆镜控制系统的运动特性和静止稳定精度的要求对系统电机和角位置传感器等部件进行选型;②控制策略的选择,为了满足系统高速扫描时高扫描线性度和静止时高位置稳定精度的要求,本文选择了软件锁相环算法作为系统的速度控制策略;③硬件电路设计,为了实现高速的运动解算和控制,选择了DSP作为控制系统的主控芯片,并在主控芯片的外围扩展了所需的硬件电路。接下来本文将从这3个方面进行详细的设计论述。
2 部件选型
2.1 扫描电机的选择
当成像装置处于前视工作模式时,要求扫描电机在探测器积分时间内匀速摆动,积分间隙期间则快速回扫。对于扫描电机的选择,首先计算电机需要提供的调速范围。图4为摆镜扫描运动关系近似图[5],其中为角速度,为时间,为摆镜运动周期,1为摆镜正程扫描时间[5]。

图4 摆镜扫描运动关系近似图
已知摆镜扫描角度为13°,正程匀速扫描时间为27ms,则根据上述运动关系有:系统匀速扫描期间的角速度1为9.05rad/s,快速回扫期间最大角速度2为49.75rad/s,摆镜反转时的角加速度为9799.8rad/s2。
当选择电机时,还应考虑摆镜绕轴的转动惯量1对系统的响应时间等运动指标产生的影响[6]。通常,当1小于电机转子惯量2时,系统调速性能不会下降。但当1大于2的5倍时,摆镜绕轴的转动惯量会对伺服系统的正常调速过程产生影响,甚至会造成系统失速[7]。考虑到摆镜绕轴的转动惯量1约为0.3kg·mm2,所以选择电机转子的转动惯量2应大于0.3kg·mm2。最后将运动关系和负载惯量的数据带入力矩计算公式,求得电机所需提供的最大转矩为5.35mN·m。通过上述分析,选择了某型有限转角力矩电机作为摆镜控制系统的工作电机。
2.2 角位置传感器的选择
当成像装置处于搜索工作模式时,内部扫描电机需要将摆镜稳定在光轴零位位置而角位置传感器的测量精度将直接影响摆镜静止时的位置稳定精度。采用768×8型长线列探测器的双模式成像装置,对摆镜控制系统角位置传感器的要求有以下几个方面:①传感器的位置稳定精度应优于5″;②空间环境适应性好,能抗力学冲击,且工作温度应能达到-40℃~60℃的范围;③体积小、质量轻,可以安装在光机扫描系统的狭小空间中;④抗干扰能力强、可靠性高。目前常用的角位置传感器有感应同步器、光电编码器、旋转式差动变压器(Rotary Variable Differential Transformer, RVDT)和基于位置敏感器件(Position Sensitive Device, PSD)的角位置传感器[8]。以下将对这4种传感器进行讨论分析,选出满足要求的角位置传感器。
圆盘式感应同步器精度可以做得很高,一般可以达到1″以下,满足摆镜静止时对角位置测量精度的要求。但是,这是在牺牲体积的基础上达到的高精度,即当圆盘直径小于12英寸(30cm)时,感应同步器的精度很难达到1″以下[9]。除此以外,感应同步器对安装的精度要求也很高,安装过程中的偏心和倾斜会引入明显的误差,所以要求偏心量应在几个微米之内。
高位数的光电编码器能够提供很高的角位置分辨率,以二进制分辨率为例,对于具有20位分辨率的光电编码器,其位置分辨率能够达到1.23″。但是由于光电编码器是接触式测量,需要将其安装电机的轴上,这会引入额外的附加转矩。我们分析了几款市面上主流的光电编码器,重新计算负载转矩,发现摆镜控制系统加装光电编码器后的负载转矩远大于小角度力矩电机所能提供的最大转矩,所以没有选择光电编码器作为角位置传感器。
RVDT是旋转式差动变压器的缩写,属于角位置传感器的一种。以美国精量电子生产的R30A RVDT为例,计算该类型传感器的分辨率。R30A RVDT灵敏度为2.9mV,这个指标的意思是在每度每伏电压的激励下灵敏度是2.9mV,即在激励交流电压3V的输入下,传感器每一度的输出电压为8.7mV。以主流的16位ADC进行输出电压采集的话,该传感器灵敏度换算成角度为10.7″。而为了达到1″的角位置分辨率,仍以16位ADC做采样求得RVDT应达到的灵敏度为167mV左右。市面上的RVDT产品仍未达到这么高的灵敏度。
PSD是一种对接收光点位置敏感的光电器件,近几十年将PSD应用到控制系统中作为角位置传感器的研究在不断发展。摆镜控制系统角位置测试原理如图5所示。

图5 角位置测试原理图
激光器产生的激光照射在摆镜的背面,经过镜面反射照射在PSD上形成光电流,随着摆镜的旋转,PSD上入射光的位置会产生平移,根据几何关系换算可以求得摆镜旋转的角度。用16位ADC进行输出电压的采集,求得PSD的角位置灵敏度,同时考虑到温度和体积的要求,最后选择国外生产的某型PSD作为摆镜控制系统的角位置传感器。
3 控制系统的控制策略及电路设计
3.1 控制策略
摆镜控制系统是一个多变量、强耦合的非线性系统,常采用位置环和电流环双闭环反馈结构控制摆镜。为了提高摆镜控制系统的速度稳态性能,在传统双环控制系统的基础上加入了软件锁相环速度反馈控制,即摆镜控制系统采用三闭环控制结构,分别是位置、转速及电流环控制,其控制框图如图6所示。
摆镜控制系统中的速度环采用了速度锁相环的形式来提高速度调节的精度。常规的速度反馈系统利用传感器将速度反馈到输入环节求得速度残差,并通过设计系统型别使系统的速度残差减小为零。但是由于传感器引入的速度测量误差是无法消除的,这就限制了伺服系统对速度的控制精度[10]。速度锁相环控制系统是通过调节速度的相位来稳速的。速度的相位是电机速度的积分,是电机在一定时间内转过的角位移,将速度的积分送入系统鉴频鉴相器进行调节,即使最后存在速度的积分无差,对速度而言是无差的,这就提高了速度调节的精度。
图7为在模拟锁相环的基础上设计的软件锁相环转速控制系统,其中比例环节、积分环节和重积分环节完成鉴频鉴相器的功能。鉴频鉴相的软件实现方式优势在于解决了数字鉴频鉴相器件存在的非线性问题[11]。在软件锁相环中加入了模式选择环节,即在不同速度误差的输入下采取的控制策略不同,这样既提高了系统调速的动态性能,也提高了控制核心CPU的运算效率[12]。软件锁相环的环路滤波器常采用一阶或二阶有源滤波器,通过采用根轨迹法分析了环路采用不同型别环路滤波器的特点,最后选择一阶有源滤波器为系统进行滤波处理。
3.2 硬件电路设计
图8为摆镜控制系统硬件电路图,整个控制部分以DSP为核心,在芯片外围扩展了所需要的电路。
主控电路的控制核心是DSP,该芯片主要完成以下几个功能:转速、转向和位置的控制,利用DSP芯片中产生的PWM脉冲去控制驱动单元实现;电流信号的检测通过接入精密电阻和DSP芯片内部的12位A/D来完成,作为电流调节、故障检测的信号;角位置信号的检测,通过PSD将角位置的模拟量输入外部ADC芯片中转换成数字量在DSP中进行运算处理,作为位置调节的信号;速度信号的检测,将ADC检测到的位置脉冲信号送往DSP微分环节生成速度反馈信号,依次经过软件鉴频鉴相和环路滤波环节,最后输入功放芯片进行电机的转速调节;除此之外,DSP还同时负责与上位机进行实时通讯及完成系统的其他各项控制功能。
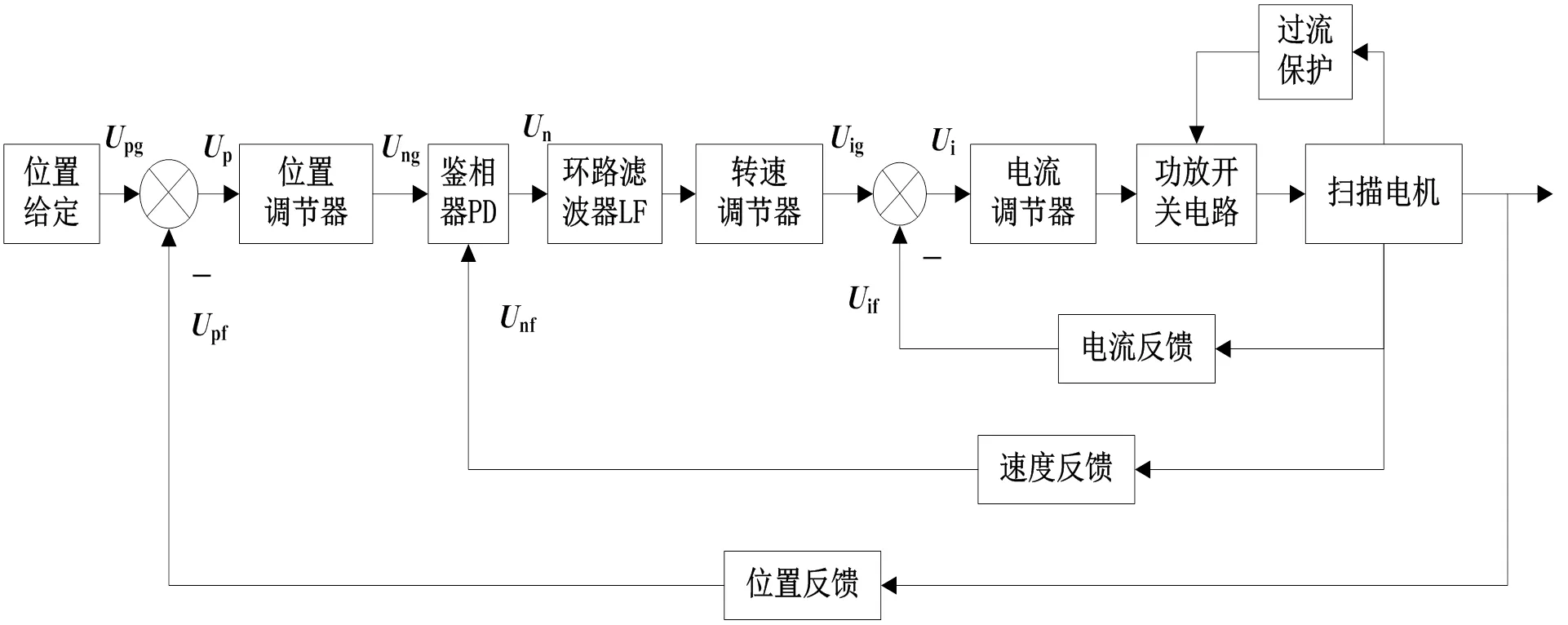
图6 扫描控制系统基本框图

图7 软件锁相环转速控制系统

图8 伺服控制硬件电路图
4 控制系统的Simulink仿真
基于以上对摆镜控制系统控制策略的分析,搭建了如图9所示的Simulink系统仿真图。对系统进行阶跃和锯齿波输入,计算系统的位置稳定精度和扫描线性度。
对于系统位置稳定精度的测量,采用阶跃输入来计算系统输出稳定时的位置偏差。在幅值为1°,阶跃起始时间为0的阶跃输入下,位置阶跃响应如图10所示。由于反馈环节增益为10,则系统输出稳定时的角度为0.1°。观察输出波形,发现系统的调节时间小于2ms。将输出波形的坐标矩阵导入到Matlab的工作空间,采集波形稳定后的68个点进行计算,得到系统稳定后的位置偏差优于2.5″,满足成像装置对位置稳定精度的要求。
对于系统扫描线性度的测量,采用锯齿波输入来计算系统扫描时的正程线性度。在27ms正程和6ms返程的锯齿波输入下,位置锯齿波响应如图11所示。对位置的输出波形,每隔0.5ms测量一个点,一直测到扫描正程的终点27ms处。将测到的若干个点的角度值和时间值输出到Matlab的工作空间,采用最小二乘法拟合数据曲线,得到拟合函数。将实际角度值减去拟合角度值得到最大偏差,再与满量程做商求得系统的扫描正程线性度为0.192%,满足成像装置对扫描线性度的要求。
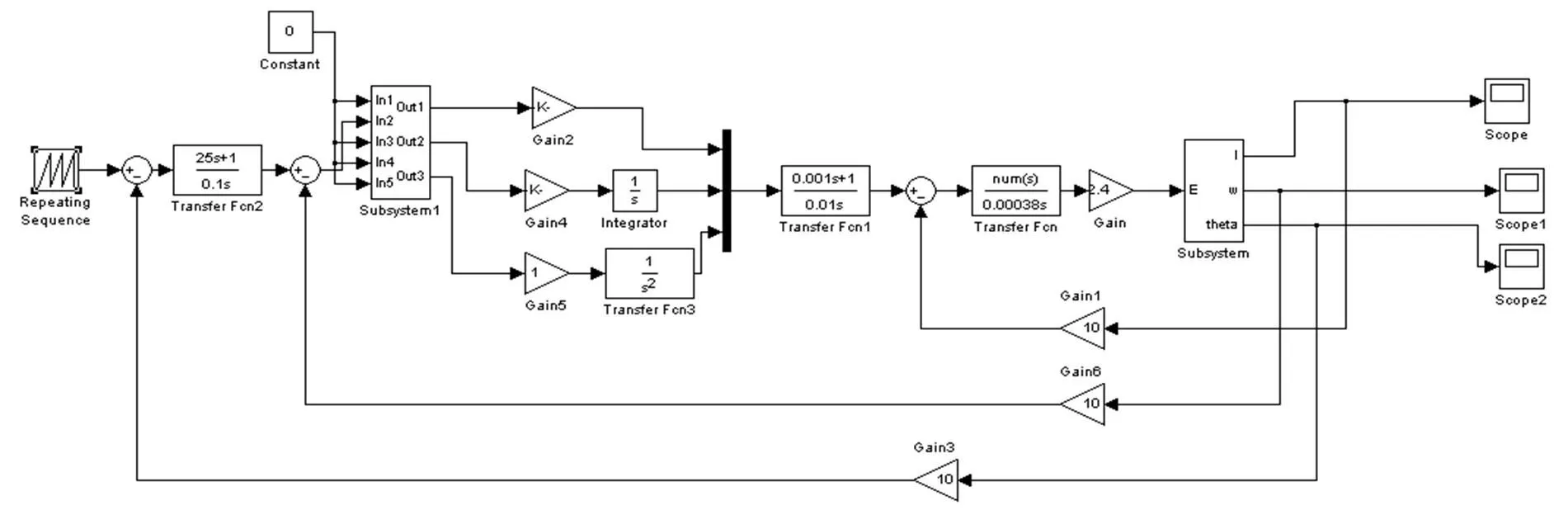
图9 摆镜控制系统仿真图

图10 位置阶跃响应图
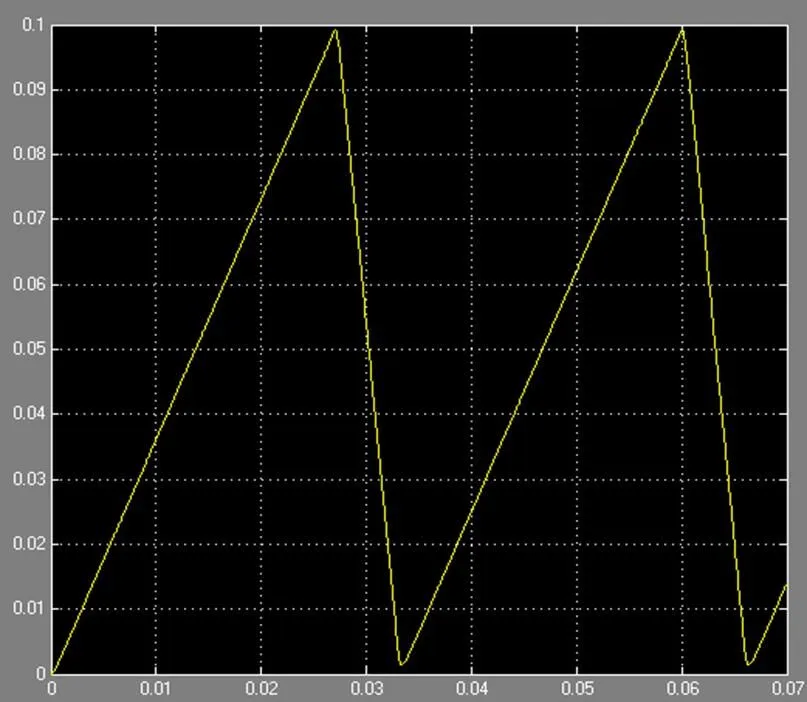
图11 位置锯齿波响应图
5 结论
本文针对长线列红外探测器双模式成像装置对摆镜控制系统的需求,提出了一种高线性和高稳定精度摆镜控制系统的实现方案。Simulink仿真结果表明,设计的摆镜控制系统扫描线性度优于0.2%,摆镜静止时的位置稳定精度优于5″,满足长线列红外探测器双模式成像装置的需求。
然而仿真结果是在理想条件下产生的,实际实验数据与仿真结果会存在偏差。例如,实际运行环境下控制系统的偏差输入量会有较大变化,使得PID运算的积分量产生累加,极容易造成系统的控制量输出超过电机的有效运行范围,造成系统震荡。所以应在实际的控制程序编写中采用积分分离的PID算法,即当偏差输入量较大时,取消积分作用,以免引起过大的超调;当偏差输入量较小时,引入积分作用,消除静差,提高控制精度;同时PID控制量的输出也应加入限幅输出环节,以免控制量输出超过电机的有效运行范围。除此以外,AD芯片采集回来的位置数字脉冲存在测量偏差,即在电机静止时,采集回来的二进制位置数据的最后两位会发生跳变,这也会对系统的控制精度产生影响,使得实际控制精度略低于理论控制精度。
[1] 胡永生, 陈钱, 顾国华, 等. 基于扫描面阵的红外预警系统及其探测性能分析[J]. 红外技术, 2008, 30(2): 71-74.
HU Yongsheng, CHEN Qian, GU Guohua, et al. IRST system based on scanning area FPA and its target detectability analysis[J]., 2008, 30(2): 71-74.
[2] 刘晓玮, 江婷婷, 李扬, 等. 基于DSP的光机扫描控制技术[J]. 兵工自动化, 2015, 34(2): 86-89.
LIU Xiaowei, JIANG Tingting, LI Yang, et al. Technique of scanning control based on DSP[J]., 2015, 34(2): 86-89.
[3] 隋修宝, 陈钱, 顾国华. 扫描型热像仪扫描匹配技术[J]. 南京理工大学学报, 2008, 32(4): 492-495.
SUI Xiubao, CHEN Qian, GU Guohual. Scan matching technology of scanning thermal imager[J]., 2008, 32(4): 492-495.
[4] 陈洁, 朱江, 浦恩昌, 等. 高线性大摆角扫描技术研究[J]. 红外技术, 2013, 35(12): 793-797.
CHEN Jie, ZHU Jiang, PU Enchang, et al. Research on the high linearity and large swing angle scanner technique[J]., 2013, 35(12): 793-797.
[5] 浦恩昌, 贺仕伟, 陈洁, 等. 某型一维大摆角扫描器的总体设计[J]. 红外技术, 2014, 36(6): 463-466.
PU Enchang, HE Shiwei, CHEN Jie, et al. Overall design of a type of one-dimension large swing angle scanner[J]., 2014, 36(6): 463-466.
[6] 杨振辉. 大型重载机床驱动系统交流伺服电机的选择[J]. 机械工程师, 2010, 8: 150-151.
YANG Zhenhui. Selection of AC Servo motor for large overloading machine tool drive system[J]., 2010, 8: 150-151.
[7] 钱平, 李宁, 魏建, 等. 伺服系统[M]. 北京: 机械工业出版社, 2011.
QIAN Ping, LI Ning, WEI Jian, et al.[M]. Beijing: Machine Industrial Press, 2011.
[8] 王长涛, 尚文利, 夏兴华, 等. 传感器原理与应用[M]. 北京: 人民邮电出版社, 2012.
WANG Changtao,SHANG Wenli, XIA Xinghua, et al.[M]. Beijing: People Post Press, 2012.
[9] 齐明, 周继斌, 刘承军. 基于圆感应同步器的高精度角度测量系统[J]. 电子器件, 2007, 30(1): 263-266.
QI Ming, ZHOU Jibin, LIU Chengjun. High precision angular measuring system based on round Inductosyn[J]., 2007, 30(1): 263-266.
[10] 吴志兵. 基于FPGA的全数字锁相环电机调速系统研究[D]. 哈尔滨: 哈尔滨工业大学, 2013.
WU Zhibing. Study on digital phase-locked loop motor speed control system based on FPGA[D]. Harbin: Harbin Institute of Technology, 2013.
[11] 肖金凤, 单长虹, 陈忠泽, 等. 基于全数字锁相环的步进电机控制系统[J]. 计算机仿真, 2012, 29(9): 208-211.
XIAO Jinfeng, SHAN Changhong, CHEN Zhongyi, et al. Design of stepper motor control system based on all digital phase-locked loop[J]., 2012, 29(9): 208-211.
[12] ZHOU Junzhe, LI Xiangyu. Study on the speed control algorithm of DC motor based on the software phase-locked loop technology[C]//, 2010: 245-248.
Design of Mirror Control System in Dual Mode Imaging Device with Long Line FPA Detector
WEI Wei1,2,CHEN Jie1,2,ZHANG Ruolan1,2,LIU Yunyi1,2,TIAN Guiping1,2
(1.,650223,; 2., 650223,)
In order to achieve two operating modes for dual-mode imaging devices with long line infrared detectors, scanning mirror control system is needed in imaging devices. The scanning linearity at high-speed scanning and position stabilization accuracy at reset are critical factors in system design. This paper focuses on the overall design and index requirements of the scanning mirror control system. And based on these indexes, an implementation scheme of a high linearity and high stability precision scanning mirror control system is proposed. The scheme was verified feasible by using Simulink simulation.
scanning mirror control system,scanning linearity,position stability accuracy,Simulink simulation
TN216
A
1001-8891(2017)01-0067-06
2016-11-02;
2016-12-05.
魏伟(1992-),男,山东人,硕士研究生,主要研究方向:伺服控制技术。E-mail:automatic_will@163.com。
猜你喜欢
建材发展导向(2021年22期)2022-01-18 06:12:46
小学科学(2020年1期)2020-02-18 06:26:40
百科探秘·航空航天(2020年12期)2020-01-22 08:57:19
小学科学(2019年12期)2019-01-06 03:38:45
电子测试(2018年14期)2018-09-26 06:04:00
电测与仪表(2017年24期)2017-12-19 05:15:22
海军航空大学学报(2015年3期)2015-11-11 17:20:03
电测与仪表(2015年9期)2015-04-09 11:59:28
建筑机械化(2015年7期)2015-01-03 08:09:05
太空探索(2014年9期)2014-07-10 13:06:30
