
双视场手持热像仪红外望远镜系统技术研究及工程应用
2017-03-26 05:51莫启元王清泉焦明印肖家宏
红外技术 2017年11期
张 林,莫启元,王清泉,焦明印,高 婧,肖家宏
双视场手持热像仪红外望远镜系统技术研究及工程应用
张 林1,莫启元2,王清泉1,焦明印1,高 婧1,肖家宏1
(1. 西安应用光学研究所,陕西 西安 710065;2. 陆军重庆军事代表局驻昆明地区军事代表室,云南 昆明 650223)
针对手持热像仪较普通热像仪的特殊要求,设计了一种适用于手持热像仪长波双视场望远镜系统,该系统变倍比为2.5倍,采用ZOOMING型轴向移动变倍方式,采用一片透镜即可实现变倍、调焦及温度补偿功能。优化了系统光机电设计,符合手持热像仪高性能、高集成、小型化、轻量化的要求,并通过了工程实际应用及外场验证试验。
手持热像仪;红外望远镜系统;双视场;调焦
0 引言
与普通红外热像仪相比较而言,手持热像仪在体积、重量、功耗等方面具有严格要求。在满足技术性能指标的前提下,手持热像仪研制的关键是满足轻便、便携、符合人机工程学等特殊的要求。而红外望远镜作为热像仪重要的组成部分之一,其光机电设计对产品尺寸、重量及性能起着决定性作用。
针对手持热像仪的特点,充分考虑各种制约因素,研制了一种用于手持热像仪的双视场望远镜系统,光学设计采用反射镜对光路进行折转方案;结构设计采用ZOOMING型轴向移动变倍调焦方式以替代传统的变倍镜组沿光轴移入移出光路的变倍方式和利用曲线套筒的调焦方式;系统控制电路设计为与探测器信号处理电路共用控制器,且选用新型、高集成、具有单芯片解决方案的表贴步进电机驱动电路。从光机电综合设计角度出发,以达到手持热像仪高性能、高集成、小型化、轻量化的要求[1]。
1 红外系统光学设计
红外光学系统由于其材料、加工工艺等的特殊性,如透射材料少、不能采用胶合零件、材料的折射率-温度和吸收系数高等,使得变倍红外光学系统的光机设计也具有一定的不同于可见光学系统的特殊性,需要在像质、透过率、材料成本及加工工艺等方面综合考虑,才能保证研制出满足指标要求的、有实际工程应用意义的产品[2]。
手持热像仪光学系统为增加接收能量,提高灵敏度,光学系统结构形式选取全透射式。考虑手持仪器的特殊性,为减小外形尺寸,解决体积、重量等各种制约因素问题,相对口径取1/2.5,同时采用同一片透镜完成变倍、调焦及温度补偿功能的变倍设计,减少器件的使用,实现手持热像仪的小型化、轻量化设计。
手持热像仪光学系统包含物镜组、目镜组、扫描反射镜和二次成像组,物镜组由前固定组、变倍组、后固定组构成,物镜组和目镜组构成变倍望远系统,变倍组轴向移动实现大、小视场切换。成像光束经过变倍望远系统通过反射镜扫描实现全视场成像。在光学设计中,以光学系统视场角(大视场8°×6°,小视场3.2°×2.4°)、相对孔径(1/2.5)和反射镜尺寸(12mm)等光学参数,确定合理的望远系统放大倍率和各镜组光焦度。经计算,望远系统大视场放大倍率2倍,小视场放大倍率6.5倍,大视场物镜组光焦度0.03,小视场物镜组光焦度0.005,目镜组光焦度0.07,二次成像组光焦度0.02。为避免能量损失,孔径光阑位于探测器冷屏处,保证冷屏效率100%。
光学透镜材料选择适用于8mm~12mm的Ge、ZnSe两种材料,其中,Ge具有较高的折射率,作为正透镜,承担了主要的光焦度;ZnSe具有较高的色散系数,用于系统消色差。为进一步减轻系统重量,采用了衍射面设计,有效地消除了系统热差和色差,减少了系统镜片数量,提高了系统透过率,并且实现了变倍组透镜完成温度补偿、变倍和调焦的功能。同时系统采用了高次非球面来提高成像质量,满足系统性能指标要求。光学系统尺寸为90mm×161mm×82mm。图1为红外小、大视场光学系统图,传递函数如图2所示,极限频率点20lp/mm,小视场、大视场轴上点传递函数均大于0.3。
设备安全性是人机工程设计中的重要组成部分,在设计手持红外热像仪物镜系统时,对以往物镜镜头凸出在壳体外的设计方案进行了改进,将物镜系统设计为全部缩置在热像仪整机壳体内部,并且在镜头周围设计有凸台保护,以便手持热像仪使用更加安全可靠。样机如图3所示。
2 双视场手持热像仪红外望远镜系统结构设计
该手持红外望远镜系统设计为大小两个不同视场,以满足大视场搜索目标,小视场识别、跟踪目标的使用要求[3]。传统的红外光学系统变倍方式多采用变倍镜组沿光轴切向移入移出光路的方式实现,该方式机构相对复杂,所占空间较大[4]。调焦方式则是利用电机经齿轮传动带动曲线套筒正反转动,从而带动内筒中镜组沿光轴做往复直线平移运动,完成调焦动作。该方式的缺点是曲线套筒的曲线加工难度较高。红外光学系统若采用上述变倍调焦机构方式,除了在结构上是两套相对独立的机构而且分别各需要一套相应的控制电路。
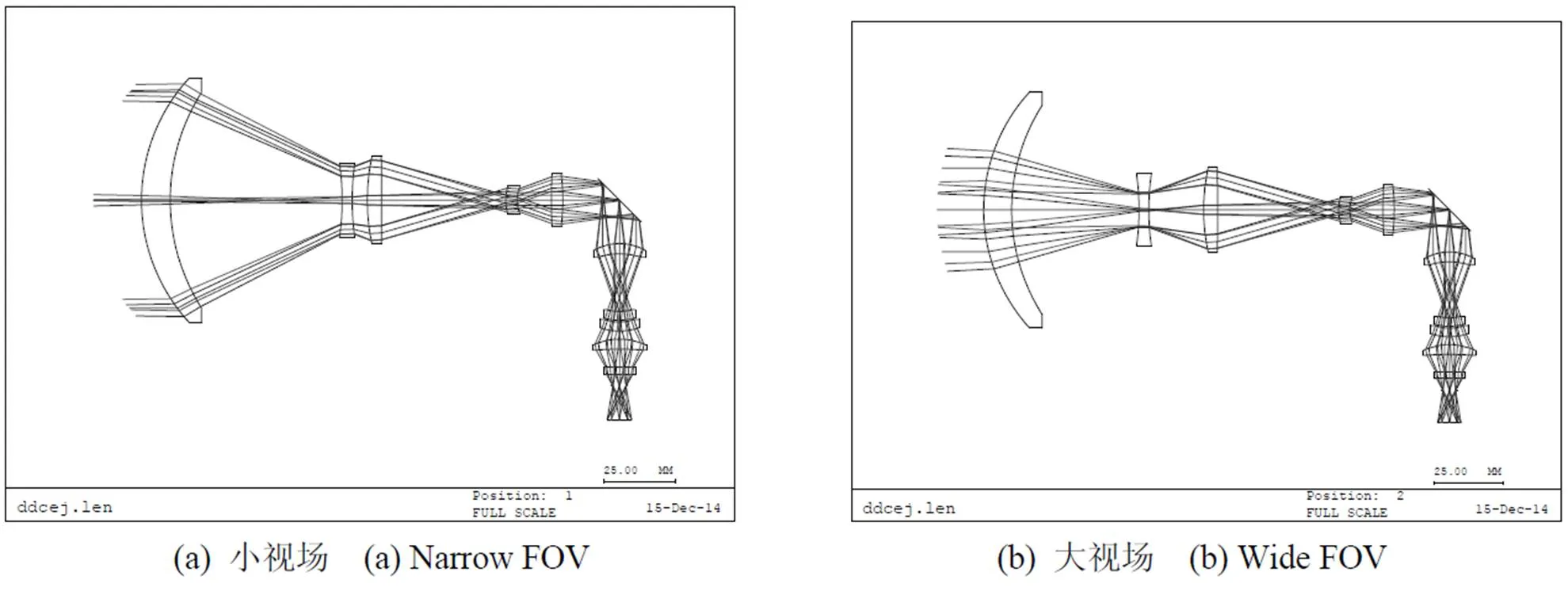
图1 红外光学系统图
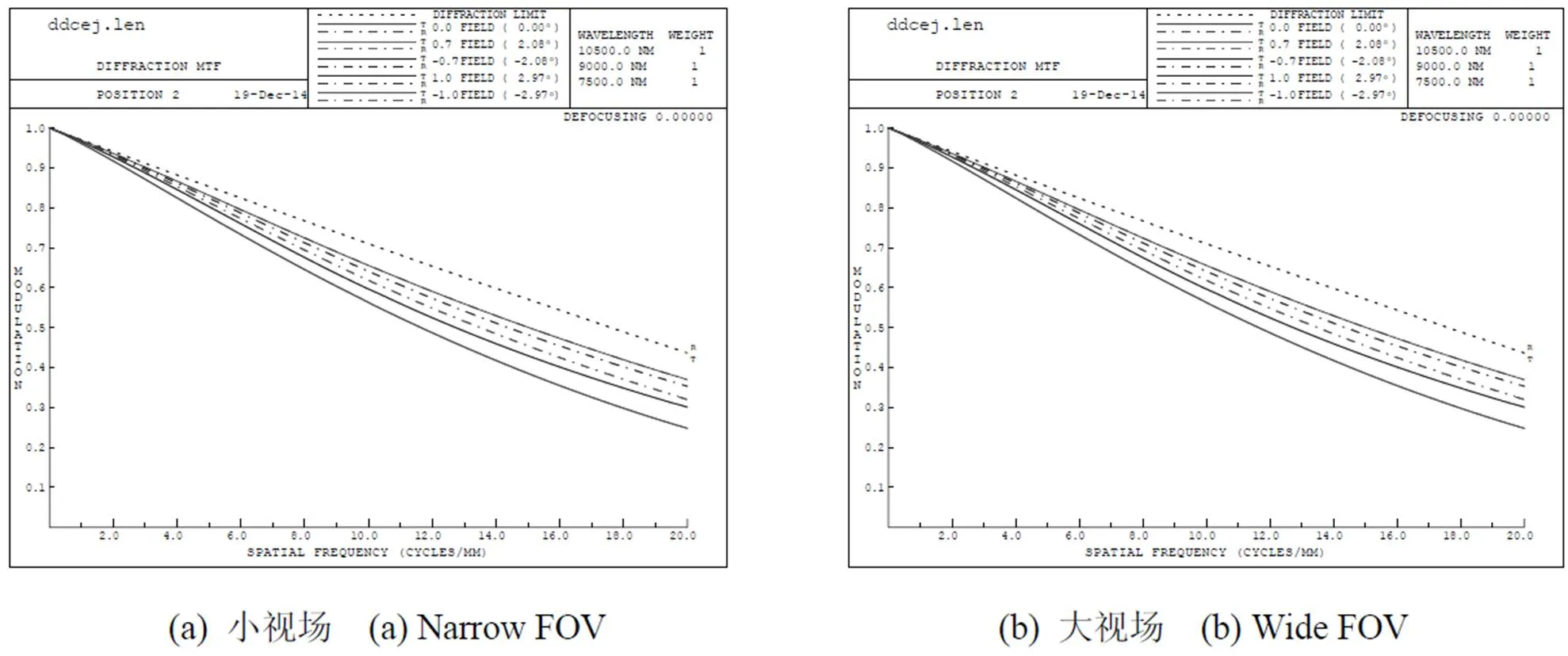
图2 光学系统传递函数曲线

图3 热像仪整机壳体样机图
显然,传统的红外望远镜系统的变倍调焦机构形式不适用于要求高集成、小型化的手持热像仪产品。故该手持热像仪光学系统的变倍调焦机构设计为结构紧凑的ZOOMING型变倍调焦方式,ZOOMING型变倍调焦方式即为轴向变倍调焦方式,该方式是通过驱动机构带动变倍透镜沿着光轴的方向平移,从而改变光学系统的焦距,实现视场变倍。该机构结构图如图4所示。由带有滑块的高精密直线导轨、高精度滚珠丝杠加消隙内螺纹驱动螺母、精密轴承、直线步进电机、到位表贴光电开关、钛合金材质基座等构成。将变倍透镜固连在滑块和驱动螺母上,当进行视场变倍时,直线步进电机驱动滚珠丝杠旋转,滚珠丝杠上的消隙驱动螺母驱动变倍透镜,在高精密直线导轨的引导下,沿着光轴轴向移动,以焊接在柔性电缆上的表贴光电开关为视场切换到位检测元件,实现视场快速切换。设计时兼顾考虑满足调焦精度所需,所选丝杠每步直线位移要在调焦精度指标范围之内,得以实现精确的微距调焦及温度补偿。ZOOMING型变倍调焦机构的优点是仅需一套电机传动机构及驱动控制电路,通过移动一片透镜即可实现系统变倍调焦及温度补偿,而且横向尺寸小、光轴方向上尺寸紧凑、结构简单。

图4 视场切换、调焦机构示意图
在该机构的实际工程应用过程中,发现存在大小视场光轴不一致问题。究其原因是在执行视场变倍动作的过程中,因透镜的移动会产生倾斜误差和移位误差,最终导致光轴不一致,热像仪的性能指标不能满足。为消除光轴一致性误差,分析找到产生误差的主要因素,采用极限偏差分析法通过分析和计算验证设计所产生的偏差量。同时对该机构采取高低温去应力时效方法,避免了在环境温度变化的情况下,光机结构应力形变因素造成光轴走动误差。最主要的环节是变倍镜组光轴与光学系统光轴的同轴度的装配调整过程。首先,变倍透镜需利用工装镜及定中心仪来定中心,确保光学零件的同心度。其次,调整高精密直线导轨的位置及变倍透镜相对于导轨滑块的相对位置。根据装调的实践经验,该调整过程在配合电机转动的情况下更容易完成。从而保证透镜在大、小视场两个位置光轴一致性良好[5]。从小视场切换到大视场,视场光轴水平方向差0条电视线,垂直方向向下差1条电视线,满足热像仪指标要求。
3 系统控制电路
本手持热像仪望远镜系统变倍调焦机构控制系统的设计指标为:2s内完成轴向位移17mm视场切换,负载100g,且具有在-40℃~+50℃的环境温度范围内温度自动补偿功能,调焦精度0.03mm。
3.1 系统的硬件设计
系统控制原理如图5所示[6-7]。

图5 控制系统原理图
控制系统主要由以下几部分组成:上位机、控制器、温度传感器、功率放大电路、直线步进电机、到位光电开关。其中到位光电开关采用微型表贴光电开关,焊接在柔性电缆上,避免印制板的制做,节省了空间,在每一处细节力求手持热像仪的小型化。两个开关的位置分别决定大、小视场的到位位置,两者的间距根据光学计算值在设计柔性电路板时布局确定,且在整机调试时可通过柔性电路板的腰子安装过孔进行位置微调,以保证光学间隔。
电路设计思路是变倍采用闭环控制,通过检测大、小视场的两个光电开关来判断变倍到位与否;调焦采用开环控制;控制器接收上位机的调焦动作指令和调焦参数,据此控制电机的步进方向及步进步数,实现透镜在大、小视场位置前后的微距调焦。
3.1.1 控制器与测温单元
为符合手持热像仪的电路高度集成化,优化整机的硬件电路设计,对电路资源整合、资源共享。热像仪望远镜系统的控制器与探测器信号处理控制器共享。控制器包括MCU和FPGA,其功能接收来自上位机的望远镜系统变倍、调焦及调焦参数指令,并实时采集工作环境温度将数据处理后进行温度补偿。
因望远镜的红外透射镜材料的折射率随温度变化显著,所以温度变化会导致透射式红外光学系统的像面漂移,使系统性能急剧下降。因此,红外望远镜系统应具有温度自动补偿功能,该望远镜光学系统采用机电主动补偿方式。温度传感器采用DALLAS半导体公司生产的单线智能数字温度传感器DS18B20,测温精度高,与控制器仅需一个连接端口即可实现双向通信,通过编程可实现9~12位的温度数字值读数方式。根据光学设计计算出的一组温度-调焦位置的数据进行曲线拟合,得到温度与调焦位置的函数关系式,控制器通过温度传感器测得当前温度值,代入该函数关系式计算得到补偿调焦位移量,进而控制功放驱动电机执行相应位移,完成红外望远镜的温度自动补偿。
在实际使用DS18B20进行测温时需注意的是,原利用DS18B20进行测温时,将其直接与控制器中的MCU通用IO引脚相连,然后通过软件向DS18B20发送各种控制命令来完成对温度数据的采集,这种方法虽然比较容易和方便,但是,因为DS18B20的单总线对时序要求比较严格,因此,为了保证与DS18B20通信的可靠性,MCU与DS18B20通信时需要采用关闭中断的方法,以防止操作时序被中断破坏。由此带来的弊端是占用MCU的资源和增加了运行时间。不能及时响应紧急任务,可能造成对调焦变倍指令不能及时响应。针对该弊端,改用FPGA与DS18B20通信,利用FPGA硬件自动的﹑周期性的产生所需要的读写时序,并把采集数据存放在一个存储器中,从而用硬件代替软件来控制对芯片的操作,大大减轻MCU的负担,让MCU有更多的时间来处理更加紧急的任务,提高系统的并行处理能力。
3.1.2 电机与驱动电路
电机采用海顿直线步进电机,取代传统旋转电机驱动方式,省略中间传动环节,将电机输出的运动直接施加在滑块上,提高了传动效率。将工程热塑性结合进转子驱动螺母,并配合使用不锈钢梯形螺纹导杆,较传统使用青铜螺母和V形螺纹结构的电机运行更为高效、耐久和安静。在兼顾考虑定位的精确性与运动的快速性,所选丝杠每步直线位移0.024384mm,完全满足调焦精度0.03mm的要求。
本着系统体积尽可能小的原则,现采用新型可编程﹑集环形分配器和功放于一体的表贴微步步进电极驱动器件A4980,能灵活设置全步进﹑半步进﹑四分之一及十六分之一多种步进驱动模式,具有高温和低温警告﹑过温关机﹑过压和欠压锁定芯片级保护功能。关键是与控制器接口简单,只需输入步进方向与步进脉冲即可完成电机驱动,无须进行相位时序的复杂编程。高集成度电路的应用无疑减小了体积、提高了可靠性。
在驱动电机应用中,发现在轴向方向有振动,且电机停转、A4980中功放使能引脚禁止的情况下,透镜受轴向力而移动,造成焦面位置变化,这对手持热像仪的使用很不利。为此A4980中功放使能引脚始终有效,使得电机停转时也具有保持力矩,实现机构自锁。这会使电机驱动器件A4980发热,所以需要采取散热措施。
3.2 系统的软件设计
系统软件主程序如图6所示。

图6 系统主程序流程图
需要注意的是:在调试步进电机变倍运转程序部分时,发现设置的步进频率较低则影响了执行机构的工作效率,变倍到位时间过长,无法满足2s内完成轴向位移17mm视场切换的技术指标要求;若设置的步进频率较高则发生丢步,甚至不能启动的现象。这种现象是由步进电机的矩频特性造成的,随步进频率的升高,电机的带载能力逐渐下降。又因为所带负载存在惯性,使步进电机可能发生到位过冲现象,影响定位精度。为解决该问题在软件上设计了变速功能。在启动时由较低的频率启动,逐渐升高到所要求的工作频率,在快到位时再逐渐降低,即经历升速、恒速、减速的过程。这样在保证不失步、不过冲的前提下对步进电机加速,实现了用最快的速度、最短的时间完成变倍动作。
4 系统实验验证
该手持红外热像仪整机分别进行了性能测试、环境实验及外场实验[8]。
4.1 性能测试
性能测试进行了空域NETD测试,相关图示数据如图7所示。
空域NETD测试,如图7所示。
4.2 高低温实验
利用高低温试验箱对热像仪进行试验,红外望远镜系统在-40℃~+60℃环境温度下均能正常工作,视场切换过程中无卡滞现象,光轴一致性良好,且满足视场切换时间要求。
-40℃温度补偿后光学系统小、大视场传递函数(MTF)如图8所示,+60℃温度补偿后光学系统小、大视场传递函数(MTF)如图9所示,在探测器衍射极限18lp/mm处,轴上传递函数均不小于0.4,轴外传递函数均不小于0.3。

图7 空域NETD测试柱状图

图8 -40℃光学系统传递函数曲线

图9 60℃光学系统传递函数曲线
空域NETD测试结果如表1所示。

表1 空域NETD测试结果数据表
4.3 外场试验
在能见度为10km的情况下,对典型车辆目标的识别距离为3.2km,图像清晰。外场试验成像图像如图10所示。

图10 外场试验图像
5 结论
针对国产288×4长波红外探测器,研制了一个结构紧凑的ZOOMING型双视场红外望远镜系统,并从光、机、电三方面进行了较为详细的设计论述,对工程使用过程中发现的问题提出了相应的解决方法、改进措施。其大、小视场成像质量较好,光轴一致性良好,符合手持热像仪高性能、高集成、小型化、轻量化的要求。对小型热像仪的双视场红外望远镜系统的设计具有参考价值。
[1] 彭焕良.手持热像仪的设计[J]. 激光与红外, 1992, 22(4): 5-9.
PENG Huanliang. Design of Hand-Held Infrared[J]., 1992,22(4): 5-9.
[2] 唐晗, 赵劲松.光学融合双波段手持热像仪设计[J]. 红外技术, 2010, 32(8): 435-439.
TANG Han, ZHAO Jinsong. Design of a Dual Waveband Handheld Thermal Imager with Optical Fusion[J]., 2010, 32(8): 435-439.
[3] 陈吕吉, 徐曼, 王红伟, 等.手持双视场红外光学系统设计[J]. 红外技术, 2011, 33(2): 100-103.
CHEN Lvji, XU Man, WANG Hongwei, et al. Design of Hand-Held Dual Field-of -View Infrared Optical System[J]., 2011, 33(2): 100-103.
[4] 李运动,孙树旺,何磊. 红外系统变倍机构研究与分析[J]. 电光与控制, 2012, 19(5): 87-90.
LI Yundong, SUN Shuwang, HE Lei. Study on Varifocal Mechanism Design for Infrared System[J]., 2012, 19(5): 87-90.
[5] 涂丹, 张林, 栾亚东, 等. 长波红外望远镜双视场光轴一致性的设计[J]. 应用光学, 2011, 32(s): 173-176.
TU Dan, ZHANG Lin, LUAN Yandong, et al. Optical axes consistency design for double-FOV long-wave infrared telecope[J]., 2011, 32(s): 173-176.
[6] 高飞, 张葆, 刘大禹.一种空间相机调焦机构的设计研究[J].长春理工大学学报: 自然科学版, 2008, 31(4): 74-76.
GAO Fei, ZHANG Bao, LIU Dayu. Design for a kind of space camera's focusing structure[J].:, 2008, 31(4): 74-76.
[7] 安源, 齐迎春.空间相机直线调焦机构的设计[J]. 光学精密工, 2009, 17(3): 609-614.
AN Yuan, QI Yingchun. Design of straightline focusing mechanism for space camera[J]., 2009, 17(3): 609-614.
[8] 陈秀萍, 张栓民, 孙婷, 等.大倍率红外连续变焦系统双电机控制技术研究[J]. 应用光学, 2013, 34(5): 754-756.
CHEN Xiuping, ZHANG Shuanmin, SUN Ting, et al. Double-motor control technology in high ratio infrared continuous zoom optical system[J]., 2013, 34(5): 754-756.
Design of Hand-Held Dual Field-of-View Infrared Optical System
ZHANG Lin1,MO Qiyuan2,WANG Qingquan1,JIAO Mingyin1,GAO Jing1,XIAO Jiahong1
(1.,710065,; 2.,650223,)
This article reports on the development of a hand-held infrared telescoping system for long-wave dual field-of-view, according to the characteristics and strict requirements of military hand-held infrared thermal cameras. The telescope with a zoom ratio of 2.5×is designed with a ZOOMING mode movement. The zoom lens can realize functions of zooming, focusing, and temperature compensation. The design result showed that the system exhibited excellent image quality, compact structure, and light weight. Moreover, it passed the practical project application and range test.
hand-held infrared,infrared optical system,dual field of view,rotate-zoom
TN216
A
1001-8891(2017)11-1001-06
2017-07-04;
2017-11-09.
张林(1970-),女,高级工程师,主要研究方向为红外技术。
猜你喜欢
中国交通信息化(2022年12期)2022-02-11
摄影之友(2020年12期)2020-12-23
电脑爱好者(2018年17期)2018-11-05
现代兵器(2016年10期)2016-10-26
系统工程与电子技术(2016年7期)2016-08-21
现代食品(2015年16期)2015-12-20
空间控制技术与应用(2015年1期)2015-06-05
科技创新导报(2014年28期)2014-12-01
中国公共安全(2013年18期)2013-12-22
兵工学报(2011年10期)2011-02-22
