
一种改进的铁路超限货物运输模拟限界检测方法
2017-03-22 02:59李鹏陶敬倩梁习锋周伟
中南大学学报(自然科学版) 2017年2期
李鹏,陶敬倩,梁习锋,周伟
一种改进的铁路超限货物运输模拟限界检测方法
李鹏1,陶敬倩2,梁习锋1,周伟1
(1. 中南大学交通运输工程学院,轨道交通安全教育部重点实验室,湖南长沙,410075;2. 中铁特货大件运输有限责任公司,北京,100070)
针对传统超限货物检查架模拟运输不能实现异物侵入深度定量检测的问题,提出基于活动支架转动位移一阶微分拐点定位的改进限界检测方法。研究限界模拟检查架设计及视频监控方案,在检查架活动支架转动臂中增设用于测量限界侵入深度的拉绳位移传感装置,并推导限界侵入深度与拉绳位移增量之间的数学关系;建立活动支架与异物发生碰撞过程的动力学方程,并对碰撞过程中惯性效应引起的活动支架“过跃”现象进行解释,给出位移一阶微分拐点定位的限界侵入深度确定方法。通过标定试验对该方法进行试验验证和误差分析,并结合实车模拟运输试验对结果进行分析。研究结果表明:该方法克服了传统单一视频监控模式无法准确量化入侵深度的问题,能较准确地对超限货物运输模拟限界进行在线检测,为超限货物的高效和安全运输提供限界数据和技术保障。
超限货物运输;检查架;限界检测;限界侵入深度
大型变压器、发电机定子等超限货物通过铁路运输时,由于货物体积较大,装车后运输宽度往往超过了机车限界,有的甚至接近铁路建筑限界。建筑限界会随环境的变化而发生改变,如果不能及时、精确地掌握线路建筑限界,不但会给超限货物运输带来不良影响,甚至会引发难以估计的安全事故[1]。因此,在铁路运输线路尤其是尚未运行过超限货物列车的线路上,对超限货车装载货物后的外形宽度进行铁路沿线的建筑限界入侵检测就显得尤为重要[2−8]。目前,传统超限货物运输模拟限界检测主要利用检查架进行在线监测。卢斌等[9−12]根据需要运输的货物尺寸制作检查架,并安装在D26B大型车上,在渝怀线(重庆—怀化)及沪昆线(上海—昆明)上进行实车实验。在实验过程中,检测架后部车体上安装视频采集系统,分别采集检查架上、中、下3部分视频以便于回放,检查架碰撞异物会发生转动,在转轴位置加装限位装置和自动报警装置,一旦发生碰撞,就会自动报警,检测到钢轨爬行观测桩、水泥桩等侵入限界的物体,并进行了整改。中南大学也利用类似原理在贵阳至桐梓、柳州至靖西等线路进行了限界检测。由于这些方法是通过异物与检查架是否碰撞作为限界判断的依据,而视频记录也仅仅是为了便于回放查看,只能定性地检测是否侵入限界,并不能计算异物入侵深度,为此,本文作者在检查架活动支架转动臂部位增设了拉绳位移传感装置,建立基于活动支架转动位移一阶微分拐点定位的精准限界侵入深度计算模型,结合视频监控和转角位移突变点自动记录,实现检查架模拟运输过程中异物入侵限界的在线智能检测。
1 检测架模拟运输方案
检查架模拟运输系统包括检查架结构、视频监控系统和活动支架转臂位移检测系统3部分。
1.1 检测架结构
检测架的轮廓根据货物装后宽度来确定。为了方便安装和调整,检测架设计6块独立的活动支架,按上、中、下位置对称分布在左右两侧,上、下2块之间垂向留有一定间隙。检测架结构示意图和实物安装图见图1。固定支架通过螺栓以及夹具紧固在落下孔车侧承梁上;活动支架通过活页与固定支架铰接在一起。为方便现场安装和调整,在水平位置上活页留有15~20 mm的调整余量;在竖直方向上,在每个活动支架上开有4个螺丝孔,在安装时与1个开有厚度为30 mm槽的钢板通过螺栓进行联接,通过调节螺纹孔与槽的位置调节高度,调整余量在25~30 mm之间。
活动支架与道旁设施发生剐蹭时,可沿逆车辆前进方向转动,在运行前方活动支架与侧承梁之间用橡皮筋连接,保证活动支架能迅速复位,同时在运行后方活动支架与侧承梁之间安装限位绳,防止活动支架拉入死角,保证活动支架不会在橡皮筋拉力下向车辆前进方向转动,如图2所示。
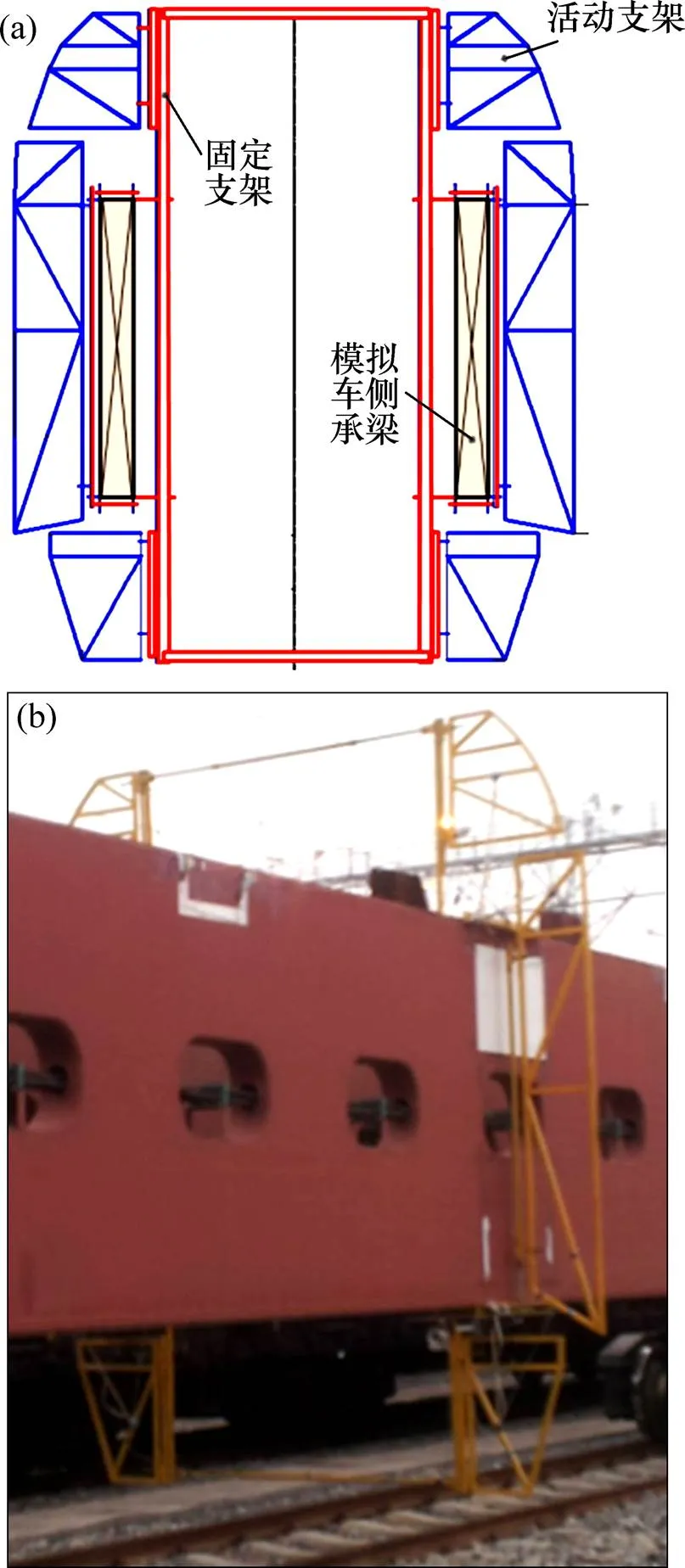
(a) 检查架结构示意图;(b) 检查架安装实物图
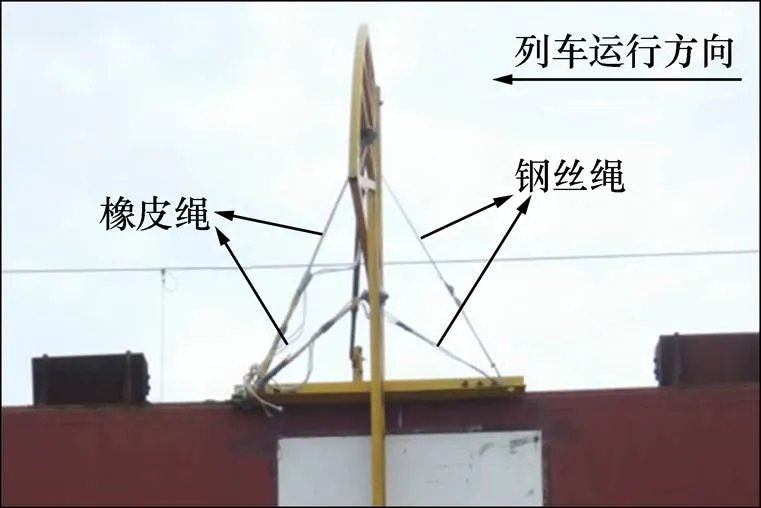
图2 活动支架的安装方式
1.2 视频监控系统
视频监测系统见图3。在落下孔车侧承梁上沿、下沿位置共计安装3台高清摄像机,以检查架活动支架作为监控对象,在运行途中对动态视频进行全程采集。监控相机与主机之间通过TCI/IP方式连接。为适应隧道内及夜间视频取光要求,配套的照明系统由4台博朗DG800高照度摄像灯组成。
同时,在牵引机车司机室内设置1台摄像机,对机车非操控端LKJ屏进行视频监控。LKJ数据系统时间与监控相机、拉绳位移计采集系统的时间严格同步。当检查架与道旁设施发生剐蹭时,系统可根据拉绳位移的突变特性寻找剐蹭时刻,结合LKJ数据系统记录发生剐蹭里程点。
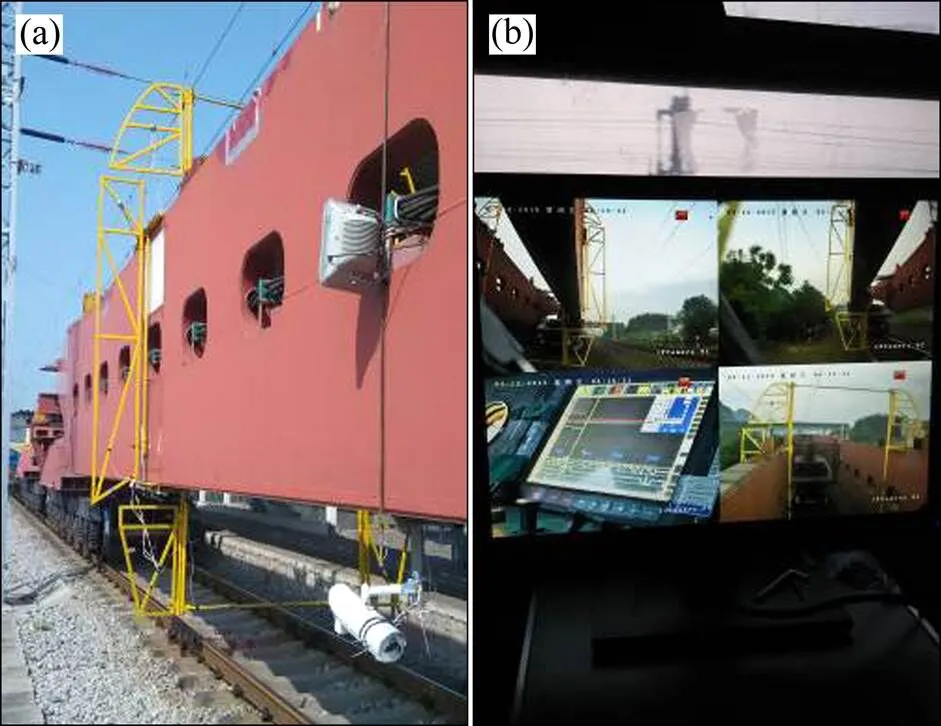
(a) 视频监控安装位置;(b) 视频数据采集系统
1.3 活动支架转臂位移检测系统
在检查架固定支架上安装拉绳位移计,位移计设置预拉伸,以实现活动支架转动过程中拉绳长度的连续变化。网口数据采集程序将位移信号存储至本地PC 机,如图4所示。

图4 拉绳式位移计安装方式
2 限界侵入深度精准计算模型
2.1 侵入深度计算
基于拉绳位移的侵入深度计算原理如图5所示。设位移计安装位置与自然状态下活动支架沿车长方向的距离为,活动支架沿车宽方向投影长度为,位移计拉绳初始长度为。当活动支架与异物发生碰撞时,活动支架转动直至异物与活动支架脱离,此时位移计拉绳长度为′。
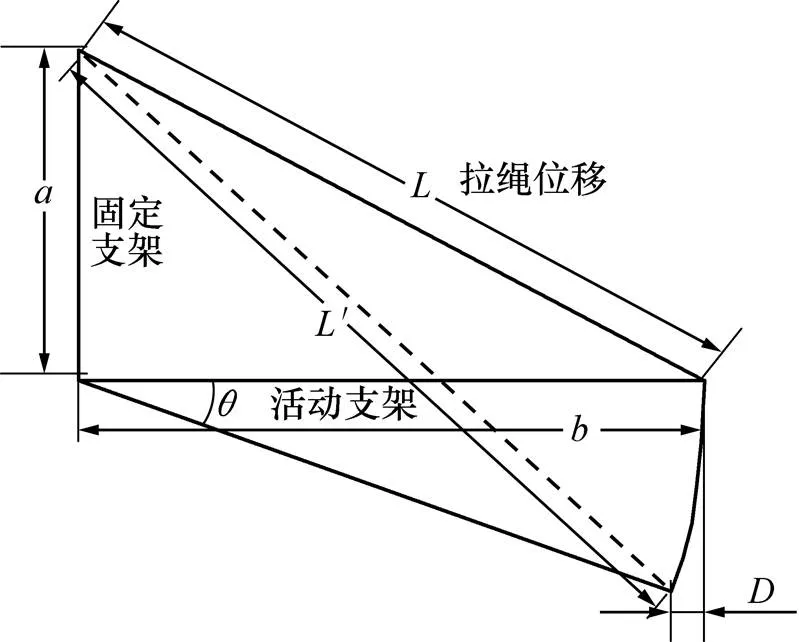
图5 拉绳位移侵入深度计算基本原理
定义碰撞过程中活动支架的转动角度为,位移计拉绳长度增至′,根据三角形余弦定理得

可得
(2)
侵入限界的深度为
即
(4)
由式(4)可知,拉绳位移计的动态拉绳长度′是计算入侵深度的关键参数。
2.2 一阶微分拐点定位
将检查架活动支架与障碍物的碰撞过程分解为3个阶段,如图6所示。
1) 障碍物与活动支架的接触初始阶段。障碍物与活动支架接触瞬间,相互接触作用力使活动支架沿运行反方向转动。
2) 障碍物“推移”活动支架阶段。由于障碍物沿车宽方向侵入检查架外形深度,在接触力作用下,障碍物以侵入深度处作用点为起点对活动支架进行“推移”,直至相互作用点移动至支架边缘,开始分离。
3) 活动支架“过跃”阶段。在碰撞“推移”最后阶段,活动支架与障碍物分离瞬间,由于惯性效应,活动支架仍沿原转动方向运动,直至橡筋绳将活动。
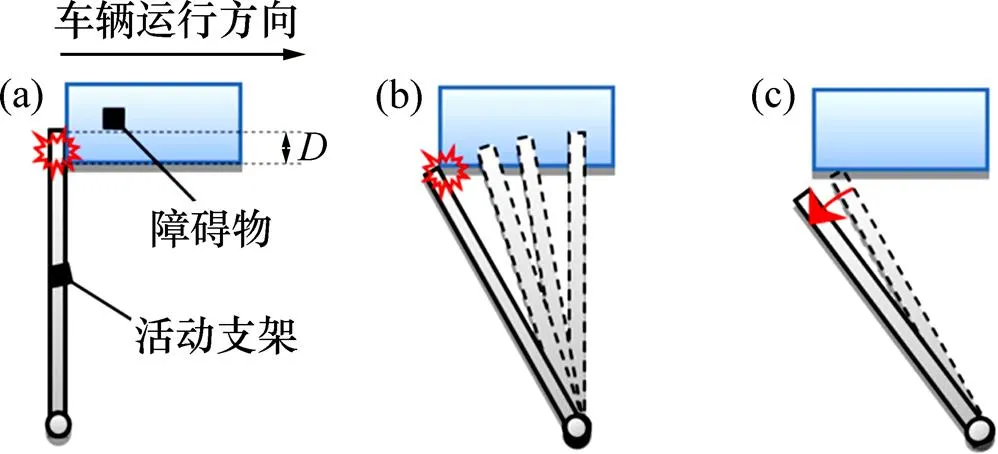
(a) 阶段1(接触);(b) 阶段2(推移);(c) 阶段3(过跃)
将活动支架碰撞过程模拟为阻尼、有驱动的动力学过程[13−14],如图7所示。图7中:为活动支架;为橡皮筋拉力;R为钢丝绳拉力;为碰撞过程中支架与障碍物接触力。在碰撞过程中,在碰撞接触力作用下,钢丝绳作用力R消失,以橡皮筋拉力、碰撞接触力和活动支架转角加速度为变量建立动力学方程为
·()=()·F−()·L·sin() (5)
式中:为活动支架相对转轴的动量矩;为支架转动角度;为支架转动角加速度;为橡皮筋拉力与活动支架的夹角。
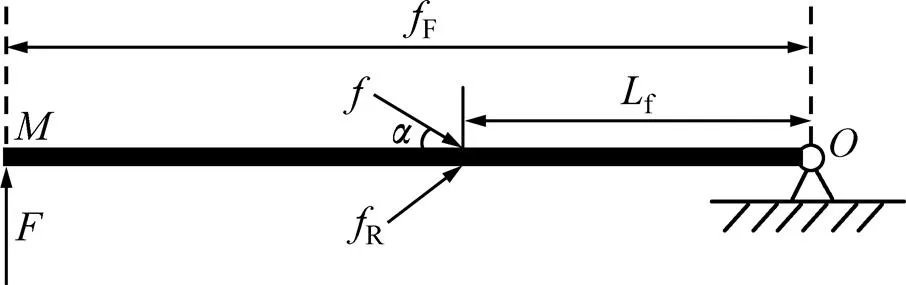
图7 活动支架与障碍物碰撞动力学模型
在碰撞过程中,由于侵入物体固定不动,活动支架可以绕固定轴转动,碰撞力作用在活动支架时间内,()·F−()·L·sin()>0,可知·()>0,即活动支架的转动角速度逐渐增大;当活动支架脱离障碍物后,()=0,在橡皮绳的拉力作用下·()<0。虽然在惯性作用下,支架的转动方向没有发生变化,但拐点出现后支架的转动角速度逐渐减小,由此可知活动支架角速度在脱离障碍物瞬间达到最大。
将式(1)两边对求导得

由于′/(cos)为正变量,d/d与d′/d变化规律一致,即活动支架的转动角速度与拉绳位移变化速度同为正值或负值,因此,转动角速度出现拐点的同时,拉绳位移变化速度出现拐点。
对活动支架拉绳位移进行一阶数值微分,得到拉绳伸缩速度曲线,选取拉绳位移突变区的一阶微分速度进行分析,对一阶微分速度曲线的最大值拐点进行识别和定位,对应到该拐点时刻的拉绳位移′INVASION,代入式(4)即可计算得出侵入深度。
3 试验分析
3.1 验证试验
检查架模拟运输采用DK36A型落下孔车作为运输车,该车型的主要技术参数如表1所示。

表1 DK36A型落下孔车主要技术参数
按照运输货物的实际尺寸要求,设计检查架活动支架并进行安装。
实车试验前,需要对本文方法进行验证。以带长度刻度的钢板分别以侵入检测架限界20,30,40和50 mm进行碰撞,检查架静止,撞击钢板速度选择为13.9 m/s(与实车试验运行速度50.0 km/h相同),拉绳位移计活动端固定在活动支架上,在验证试验过程中对拉绳位移进行实时动态采集。
对侵入检测架限界20 mm工况下的结果进行处理,得到拉绳位移曲线及一阶速度曲线,见图8。
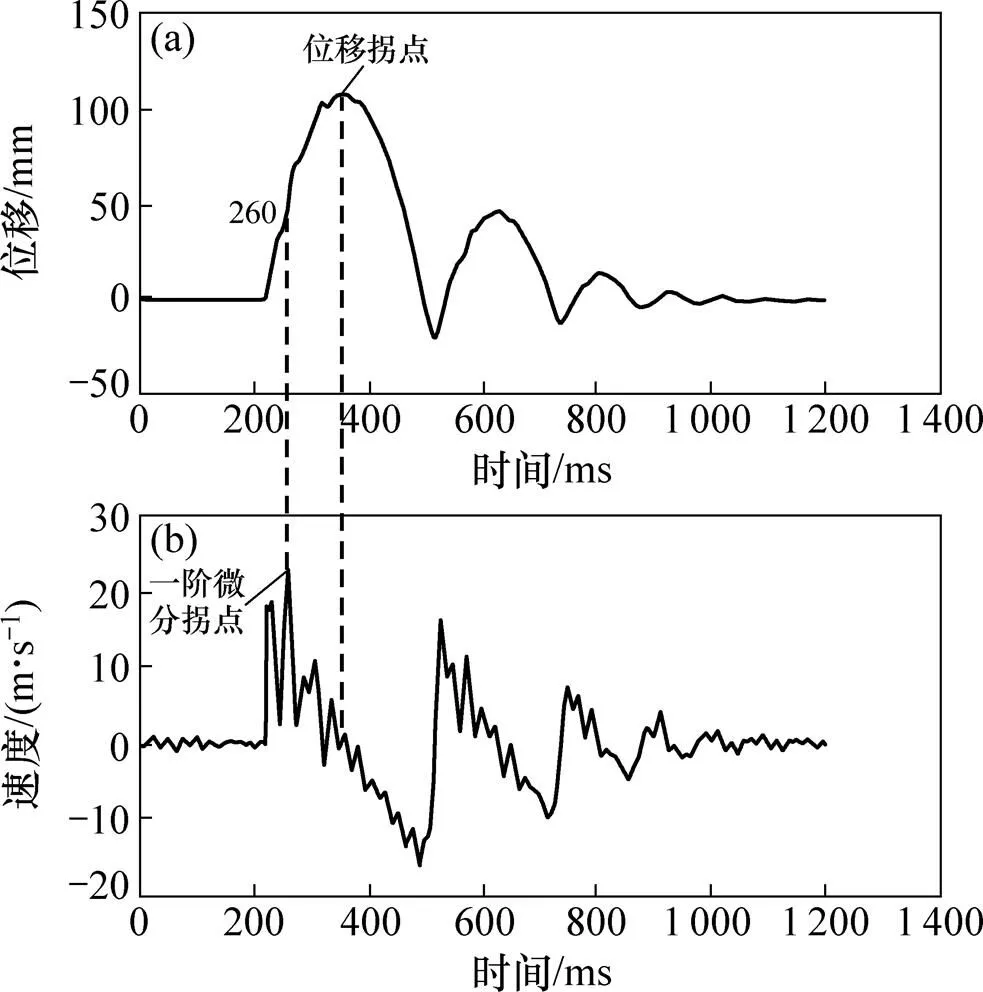
(a) 位移;(b) 速度
由图8可知:活动支架与钢板发生碰撞并脱离后,在惯性作用、橡皮筋与钢丝绳的拉力作用下来回摆动。由于钢丝绳刚度较大,这在很大程度地限制了活动支架逆碰撞方向的运动,而橡皮筋较松软,活动支架沿碰撞方向位移较大,这也是拉绳位移的正半轴极值要比负半轴极数大的主要原因。位移的拐点最大值出现在360 ms,为107.8 mm,该时刻对应一阶速度曲线的速度为0,即活动支架在碰撞力作用下转角达到最大;一阶速度曲线的拐点出现在260 ms,由本文方法分析可知,该时刻为侵入物(钢板)与活动支架分离瞬间,对应的位移为55.5 mm。
侵入深度计算的参数初始值,和分别为220,280和356 mm。
′=411.5 mm,代入式(4)可以计算到=17.8 mm。
同理,标定钢板侵入深度分别为30,40和50 mm的计算结果,如表2所示。
可见,按照位移一阶微分拐点计算的结果与实际入侵深度的相对误差均在5.0%以内。
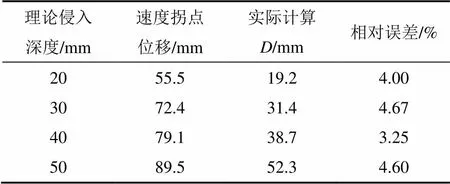
表2 不同标准侵入深度的计算结果比较
3.2 实车试验
2015年4月在湖南永州至广西靖西间进行检查架模拟运输。按照南宁铁路局的铁路运输调度命令,对运输全程检查架活动支架进行视频监控。
对监控结果和采集数据进行分析发现,在湘桂线K302+100 m里程点位置,检测架与信号牌发生了刮蹭,该过程的拉绳位移、一阶速度曲线如图9所示。
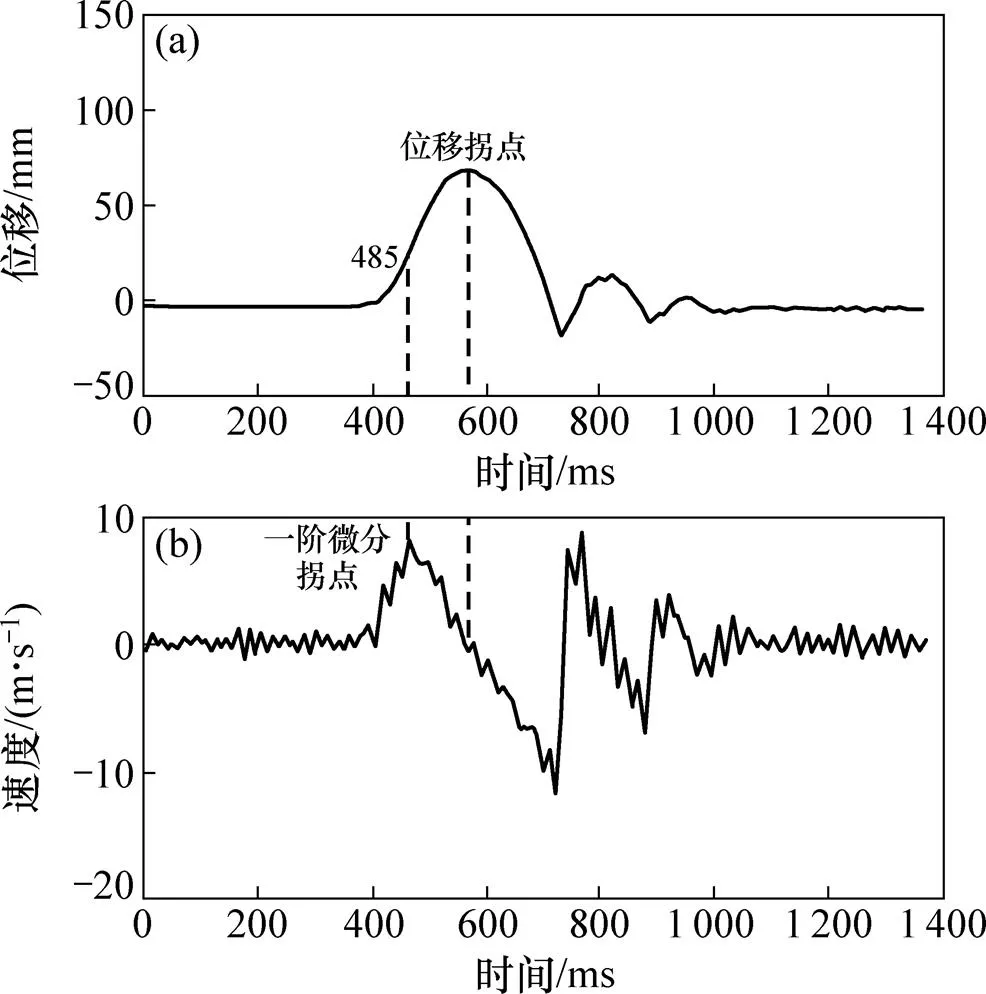
(a) 位移;(b) 速度
由图9可以得出:拉绳位移的一阶微分速度拐点出现在485 ms,对应的拉绳长度为41.1 mm,计算得侵入深度=8.9 mm。
在线路整改过程中,为保证足够的安全裕量,在侵入深度基础上增加3 mm,将信号标志牌沿远离轨道中心线方向平移12 mm。在随后的实际货物运输过程中,运输专列通过同一位置,没有发生货物与信号标志牌刮蹭的现象。可见,该限界检测方法可有效保障超限货物的安全运输,具有一定的工程应用价值。
4 结论
1) 在活动支架转动臂结构中增设了用于测量限界侵入深度的拉绳位移传感装置,建立了活动支架与异物发生碰撞过程的动力学方程,确定了位移一阶微分拐点定位的侵入深度计算方法。
2) 通过逐级标定对本文提出的检测方法进行实验验证和误差分析,本方法所得限界侵入深度与实际限界侵入深度的相对误差保持在5.0%以内,能够满足检测精度要求。
3) 经后期实际货物的专列运输验证,该方法克服了传统单一视频监控模式无法准确量化入侵深度的问题,为铁路限界的整改提供了依据,可以有效保障铁路超限货物的运输安全。
4) 本文测试方法在检查架碰撞树枝等柔性材料时,由于柔性材料会变形甚至损坏,结果将会出现较大误差,因此,需开展非接触式的利用光学测距,以进行限界检测。
[1] 李雪芹, 丰伟. 铁路限界对超限货物运输影响的研究[J]. 铁道运输与经济, 2007, 29(11): 74−76.LI Xueqin, FENG Wei. The influence on transportation of out-of-gauge goods by railway gauge[J]. Railway Transport and Economy, 2007, 29(11): 74−76.
[2] 汤波. 铁路超限超重货物运输优化研究[D]. 长沙: 中南大学交通运输工程学院, 2012: 1−6. TANG Bo. Optimization of railway transportation of out-of-gauge goods[D]. Changsha: Central South University. School of Traffic and Transportation Engineering, 2012: 1−6.
[3] 韩梅. 铁路超限货物运输理论及应用研究[D]. 北京: 北京交通大学交通运输工程学院, 2006: 1−2. HAN Mei. Study on theory and application of railway transfinite freight transportation[D]. Beijing: Beijing Jiaotong University. School of Traffic and Transportation, 2006: 1−2.
[4] 张进德, 田葆栓, 李代英, 等. 中国铁路长大货物运输[M]. 北京: 中国铁道出版社, 2001: 95−100. ZHANG Jinde, TIAN Baoshuan, LI Daiying, et al. Long and large goods transportation of Chinese railway[M]. Beijing: China Railway, 2001: 95−100.
[5] 赵文成, 许贤泽, 乐意, 等. 基于双探测器的手持式激光测距仪系统设计与实现[J]. 中南大学学报(自然科学版), 2015, 46(8): 2843−2849. ZHAO Wencheng, XU Xianze, LE Yi, et al. System design and implementation for a portable laser rangefinder with dual detectors[J]. Journal of Central South University(Science and Technology), 2015, 46(8): 2843−2849.
[6] PINTO A M, ROCHA L F, MOREIRA A P. Object recognition using laser range finder and machine learning techniques[J]. Robotics and Computer-Integrated Manufacturing, 2013, 29(1): 12−22.
[7] PARK H S, SON S, CHOI S W, et al. Wireless laser range finder system for vertical displacement monitoring of mega-trusses during construction[J]. Sensors, 2013, 13(5): 5796−5813.
[8] CHUNG W, KIM H,YOO Y, et al. The detection and following of human legs through inductive approaches for a mobile robot with a single laser range finder[J]. IEEE Transactions on Industrial Electronics, 2012, 59(8): 3156−3166.
[9] 卢斌. 渝怀及沪昆线超限货物大件运输模拟限界检测[J]. 铁路采购物流, 2010, 5(11): 57−59. LU Bin. Gauges detection simulated by railway transportation of out-of-gauge goods in Chongqing—Huaihua Railway and Shanghai—Kunming Railway[J]. Railway Procurement and Logistics, 2010, 5(11): 57−59.
[10] 尹启泰. 铁路货运组织[M]. 成都: 西南交通大学出版社, 1993: 195−205. YIN Qitai. Railway freight organization[M]. Chengdu: Southwest Jiaotong University Press, 1993: 195−205.
[11] 李青松, 王艳玲. 铁路建筑限界管理亟待加强[J]. 铁道运营技术, 2007, 13(4): 14−16. LI Qingsong, WANG Yanling. Strengthen the management of railway gauge[J]. Railway Operation Technology, 2007, 13(4): 14−16.
[12] GE Feng. The development and its logistical countermeasure of China railway’s long and large goods transportation[C]// International Conference on Technology and Education. Chengdu, China, 2007: 485−490.
[13] CHAIT Y. A natural model expansion for the flexible rlbot arm problem via a self-adjiont formuletion[J]. IEEE Trans on Roboties and Automation, 1990, 6(5): 601−603.
[14] 马晓青, 韩峰. 高速碰撞动力学[M]. 北京: 国防工业出版社, 1998: 138−156. MA Xiaoqing, HAN Feng. High-speed collisions aerodynamics[M]. Beijing: National Defence of Industry Press, 1998: 138−156.
(编辑 陈灿华)
An improved detection method for railway clearance in transportation of out-of-gauge freight
LI Peng1, TAO Jingqian2, LIANG Xifeng1, ZHOU Wei1
(1. Key Laboratory of Traffic Safety on Track of Ministry of Education,School of Traffic & Transportation Engineering, Central South University, Changsha 410075, China;2. China Railway Special Transportation of Large Cargo Services Co. Ltd., Beijing 100070, China)
The traditional examining rack tests are always used to detect the railway clearance before the out-of-gauge freight transportation, however, this method cannot decide the intrusion-depth of the foreign matter quantitatively. To solve this problem, an improved method based on the inflection point’s localization through the first partial derivative of the pivoted frame’s displacement was proposed. The design projects of the examining rack and video monitoring system were presented. Rope displacement sensors for measuring the intrusion-depth were added on the rotating arm of the pivoted frame, and the mathematical relationship between the intrusion-depth and rope displacement increment was deduced. Then, a kinetic equation between the pivoted frame and foreign matter was established, and the over-rotation phenomenon due to the inertia effect was shown in the process of the collision, which determined the method for the intrusion-depth based on the inflection point’s localization. Finally, an experimental calibration was carried out and the error was analyzed. Meanwhile, the full-scale tests were conducted to validate the theory. The results show that this method overcomes the problem that the intrusion-depth of the foreign matter can’t be quantitatively detected by the video monitor system. It can detect the gauge precisely by the simulative transportation of out-of-gauge freight, which can provide data and technical supports for the efficient and safe transportation of out-of-gauge freight.
transportation of out-of-gauge freight; examining rack; gauges detection; invading depth of gauges
10.11817/j.issn.1672−7207.2017.02.036
U271.91
A
1672−7207(2017)02−0547−06
2016−06−10;
2016−08−18
高速铁路基础研究联合基金重点资助项目(U1134205);中南大学教师研究基金资助项目(2013JSJJ013);中国铁路总公司科技研究开发计划课题(2015J007-O)(Project(U1134205) supported by Joint Fund of High-speed Railway Fundamental Research; Project(2013JSJJ013) supported by Teachers Research Fund of Central South University; Project (2015J007-O) supported by the Technological Research and Development Program of China Railway Corporation)
梁习锋,教授,从事轨道交通安全研究;E-mail:gszxlxf@163.com
猜你喜欢
铁道标准设计(2022年10期)2022-10-10
轨道交通装备与技术(2022年3期)2022-07-29
体育科技文献通报(2022年3期)2022-05-23
交通科技与管理(2021年5期)2021-06-13
艺术品鉴(2020年4期)2020-07-24
汽车与新动力(2019年5期)2019-11-07
数学大王·趣味逻辑(2019年9期)2019-10-09
汽车观察(2019年2期)2019-03-15
理科考试研究·高中(2017年7期)2017-11-04
红岩春秋(2017年6期)2017-07-03
