基于肌肉的人体运动仿真研究
2017-03-18 06:34:04马文超曹宁哲
电视技术 2017年2期
关键词:肌肉
马文超,侯 进,曹宁哲
(西南交通大学 信息科学与技术学院,四川 成都 611756 )
基于肌肉的人体运动仿真研究
马文超,侯 进,曹宁哲
(西南交通大学 信息科学与技术学院,四川 成都 611756 )
针对当前国内缺少满足牛顿运动定律的人体运动仿真问题,提出了基于肌肉的人体运动仿真方法。该方法首先建立了基于解剖学的人体骨骼肌肉模型,然后进行运动捕获数据与人体模型的匹配,其次构建了主要关节点的局部坐标系,接着运用多刚体运动学与动力学进行运动学及动力学参数的计算,之后施加空间力学平衡约束得到了有效的关节运动约束机制。实验结果表明,利用该算法实现的人体运动仿真真实、自然、逼真,证明了算法的有效性。关键词: 肌肉;骨骼肌肉模型;运动捕获;多刚体运动学
人体运动仿真是生物力学、机器人学和计算机科学交叉产生的研究领域,是一种利用计算机模拟真实人体运动过程的技术,具体包括建立数学模型,计算给定虚拟人约束条件下自然真实的物理运动过程,并在利用计算机生成的虚拟环境中以三维图像方式逼真呈现该运动过程[1]。与人体骨骼动画相比,该技术实现的人体运动符合牛顿运动定律,既可增强虚拟环境的真实性与沉浸感,还可进行现实任务的完成和操作培训等。
计算机技术与虚拟人应用的发展,人们对符合人体生理特性以及运动特征的虚拟人模型需求越来越高。Chadwick等人[2]重点对人体手臂和肩部的运动特性进行了深入分析,为了减少算法运算时间,达到模型对控制参数改变进行实时反应的效果,采用多项式来表示肌肉的行为状态,取得了很好的效果。Ayusawa等人[3]利用非线性规划,通过递推牛顿-欧拉方程进行梯度计算,解决了传统方法需要在给定时间序列情况下进行大规模的逆运动学计算的问题,从而可以快速从运动捕获数据中获得人体运动学参数。Jung等人[4]分别在仅提供关节运动学参数以及同时提供脚部压力的情况下,对反作用力模型进行了深入探讨,并在ANYBODY中进行了验证。对在某些不适合放置测力垫的情景下进行地面作用力的分析,提供了极大的便利。Xu等人[5]对肌肉系统进行了研究,从肌肉的生理形状出发,提出虚拟肌肉控制模型,将研究成果应用到仿生领域,对机器人手臂的控制取得了良好效果。Dustin等人[6]针对目前控制算法缺乏鲁棒性等缺点,建立了新的人体手部的肌肉骨骼模型,通过肌电信号来预测手和腕关节的运动。戚福州[7]利用国际人体测量学数据及层级建模的方法,构造了具有骨骼层与皮肤层的双层虚拟人模型,实现了虚拟人角色建模。黄永坤[8]针对虚拟人运动过程中皮肤出现塌陷失真的问题,运用构造二次贝塞尔曲线的方法,使该问题得到明显改善。Assassi[9]利用人体解剖学数据结合人体运动学及动力学原理,对髋关节软骨运动进行了深入分析。Stanev[10]使用kinect捕获人体的关节运动轨迹,其次运用逆向运动学及动力学对人体各关节运动参数进行了求解,然后采用静态优化算法对肌肉力进行了估算。
目前国内外众多组织和研究者都把工作重点放到各自应用领域的虚拟人研究,只对虚拟人特定部位(上肢、颈部等)进行仿真评价,缺乏对虚拟人在满足牛顿运动定律下的整体运动仿真的研究。本文首先通过分析真实人体结构特征,建立了基于人体解剖学和人体测量学的参数化全身人体骨肌模型。然后对运动捕获数据进行整理,得到实验对象的运动学模型,并将这些运动学参数与所建立人体模型进行匹配。其次建立主要关节点的局部坐标系。接着将各体段视为刚体,具有质量、质心和转动惯量,进而运用多刚体运动学与动力学进行质心加速度、角加速度、力与力矩的计算,之后利用空间力学平衡约束,得到了有效的关节运动约束机制,实现了人体运动仿真。系统流程如图1所示。

图1 人体运动仿真系统整体流程图
1 人体几何模型的建立
1.1 人体骨骼系统构建
人体骨骼系统十分复杂,包含206块骨骼,约占人体体重的20%,主要分为躯干骨、颅骨、上肢骨以及下肢骨。因此,在保证人体结构真实性的情况下,为了降低仿真的复杂度,需要对人体结构进行必要的简化。目前,H-Anim是常用的表示虚拟人的国际标准。通过对人体关节的分析可得,各个关节符合层级结构特征。各个节点采用继承机构,形成兄弟节点和儿子节点。一般根据实际需要,只保留能体现人体运动特征的关节点。如图2所示。本文所使用的人体骨骼模型数据均由三维图形软件获取,并对骨骼模型数据进行处理,获得了简化的人体骨骼模型,按人体骨性标志将人体分割成若干段,每段称为体段。以骨性标志为分界点对体段进行划分,得到一个15个体段,29个自由度(Degree of Freedom, DOF)的人体解剖骨骼模型。如图3所示。
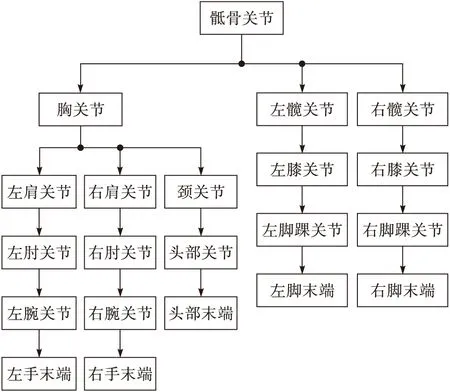
图2 人体关节树形结构图

图3 人体解剖模型
1.2 人体关节模型
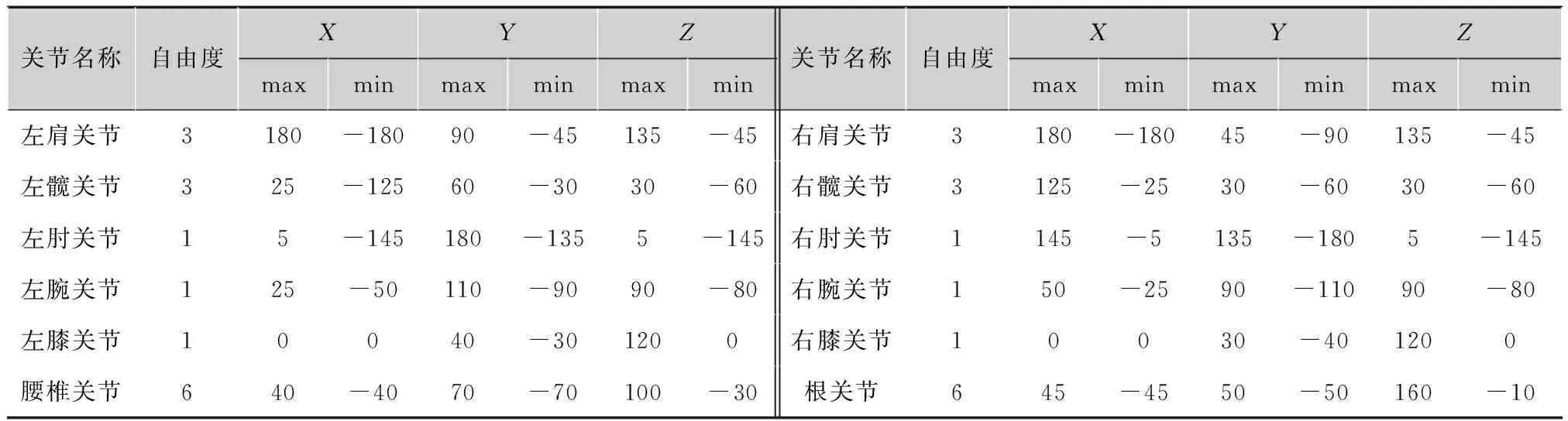
各骨之间借助结缔组织相互连接,形成骨连结。根据连结方式,分为直接连结和间接连结。间接连结即关节。人体的关节是骨骼的骨块(如股骨和髋骨)之间的连接点,也是伸展力、扭转力的传输以及各类运动所必须的结构。笔者按照关节实际运动中的自由度对人体的关节进行分类同时确定活动范围:不能旋转,只能上下弯曲的1个DOF的关节,如膝关节。既能旋转又能摆动的3个DOF的关节,如腰椎关节。在旋转和平移上均有3个DOF的关节,如根关节。各关节自由度及活动范围分配情况如表1所示。
表1 各关节自由度及活动范围
关节名称自由度XYZmaxminmaxminmaxmin关节名称自由度XYZmaxminmaxminmaxmin左肩关节3180-18090-45135-45右肩关节3180-18045-90135-45左髋关节325-12560-3030-60右髋关节3125-2530-6030-60左肘关节15-145180-1355-145右肘关节1145-5135-1805-145左腕关节125-50110-9090-80右腕关节150-2590-11090-80左膝关节10040-301200右膝关节10030-401200腰椎关节640-4070-70100-30根关节645-4550-50160-10
1.3 肌肉几何建模的实现
目前肌肉的几何建模主要是用肌肉力作用线来表示。第1种为直线段(straight-line)法。利用肌肉在骨骼上的附着点之间的连线进行表示,此方法适合肌肉附着点单一的肌肉。第2种为质心线段(centroid-line)法。在充分考虑肌纤维方向的基础上,假定肌肉横截面上的质心构成了作用在肌肉上的力的曲线[11]。本文根据所需肌肉的不同种类,分别采用这两种肌肉的几何建模方法,共建立92条肌肉。如图4所示。

图4 人体骨肌模型
2 运动数据的处理
2.1 运动数据的获取
近年来在人体运动仿真领域中,常采用运动捕获设备来获取运动数据。运动捕获设备通过使用位置传感器测量到物体的运动轨迹,并将运动数据保存下来。然而,目前具有较高精度的运动捕获设备均为国外生产,价格昂贵。卡耐基梅隆大学提供了免费的运动捕获数据,本文所使用的运动数据就来自此数据库。
2.2 骨肌系统的匹配
为了将运动数据作用到本系统所建立的人体骨肌模型上,需要完成被测对象骨肌系统与本系统人体模型的匹配。匹配因子的计算方法如下:定义两个相邻的标记点(experimental marker)为一组,它们的距离为e1,骨肌系统对应的一组虚拟标记点(virtual marker)的距离为m1,则定义此组比例为
(1)
其中:e1由运动捕获数据获得,m1由人体骨肌模型获得。取比例因子为所有相邻标记点比例的均值,即
(2)
其中:n为所有两个相邻标记点构成的组数。
2.3 关节坐标系的构建
本文按照人体解剖结构,分别在主要关节点建立了局部坐标系。其中定义:同时与地面垂直与身体长轴平行的为垂直轴。与垂直轴垂直同时与地面平行,方向为身体前后方向的轴为矢状轴。与身体长轴垂直同时与地面平行,身体左右方向的轴为冠状轴。矢状面是沿矢状轴方向将人体分为左、右两部分的面。冠状面是沿冠状轴方向将人体分为前、后两部分的面。水平面是同时垂直于矢状面与冠状面的面,将人体分为上、下两部分。


(3)
则完成从X,Y,Z到Xi,Yi,Zi的坐标变换的矩阵为T·R,坐标变换公式为
(xi,yi,zi,1)=(xi,yi,zi,1)·Ti·Ri
(4)
经推导化简得从Xi+1Yi+1Zi+1到下一时刻坐标Xi+1Yi+1Zi+1的平移矩阵为(Ti+2)-1·Ti,旋转矩阵为Ri·(Ri+1)-1。
2.4 多刚体运动学参数计算
运动学参数的计算包括瞬时速度、加速度、瞬时角速度和角加速度。若要求解刚体的瞬时角速度以及角加速度,需要将旋转矩阵用刚体旋转角α,β,γ表示,需完成旋转变换操作,方法如下:
(5)
整体旋转矩阵R为3个坐标轴的基本旋转矩阵的乘积,即
(6)
则取任意坐标(xi,yi,zi)及其对应的坐标(x,y,z)有以下转换关系
(xi,yi,zi,1)=(x,y,z,1)·R
(7)
将式(7)与式(6)联立求解可得在任意坐标下刚体的旋转角α,β,γ的值。
该刚体质心的瞬时位移可由式(3)获得,即
(8)
进而可得刚体的瞬时速度vi,vi+1及加速度ai为
(9)
刚体角加速度可根据所求得旋转角α,β,γ的值进行求解,即
(10)
式中:i表示运动数据的帧数;ω为质心瞬时角速度。
2.5 多刚体动力学参数计算

则根据牛顿第二定律及牛顿-欧拉平衡方程可得矢量关系如下
(11)
(12)
假设力的作用点Q在世界坐标系下的坐标值为X,Y,Z,则对于任一力对轴之矩的解析式为
Mx(F)=YFz-ZFy,My(F)=ZFx-XFz,
Mz(F)=XFy-YFx
(13)
式中:Fx,Fy,Fz分别为力F在X,Y,Z轴上的分量;Mx(F),My(F),Mz(F)分别为力矩M(F)在X,Y,Z轴上的分量。
通过联立求解代入所有参量后的式(11)~(13),可得
(14)
(15)
(16)
(17)
2.6 多刚体系统平衡约束

则根据牛顿第二定律及牛顿-欧拉平衡方程可得矢量关系
(18)
(19)
体段1的空间力系平衡方程可由式(18)~(19)可获得,即
(20)

(21)
(22)
(23)

(24)

(25)
3 实验结果与分析
本次实验数据的采集对象为一名健康男性,年龄38岁,身高1.83 m,体重65.9 kg,速度为1.96 m/s。采样频率为60 Hz,共采集500帧数据。由于运动捕获数据存在噪声干扰,因此在实验仿真前对数据进行了低通滤波,截止频率为50 Hz。依据滤波后的运动数据,本文实现了运动仿真,并选取一个步态周期进行展示。如图5和图6所示,该动作始于左脚与地面接触,终于右脚与地面接触,动作完成耗时0.912 s。图5分别为第0帧,第5帧和第10帧。图6分别为第15帧、第20帧和第25帧。

图5 第0、5、10帧运动图像
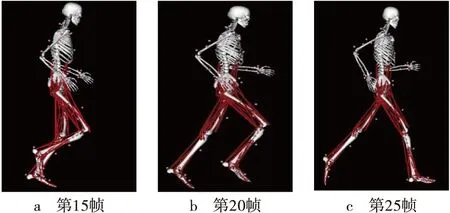
图6 第15、20、25帧运动图像
从图中可看出,第0帧时,人体运动状态发生较大改变使加速度增大,从而使得右小腿骨及膝关节承受的力和扭矩比较大。第25帧时,在人体运动状态改变结束的情况下,此时右腿的加速度减小,则右小腿骨及膝关节承受的力和扭矩也相应的较小。图7分别为第2帧、第12帧和第22帧。图8分别为第28帧、第38帧和第48帧,分别展示右腿股内侧肌以及左腿股内侧肌在运动过程中的变化情况。由图可见,肌肉收缩正常,肌肉作用线随着膝关节角度的增大而加长且经图7和图8对比可得,左右肌肉在相同关节角度下肌肉作业线长短相同。

图7 右侧大腿股内侧肌变化情况

图8 左侧大腿股内侧肌变化情况
结果与文献[6]和[9]相比,本文实现了人体整体运动的仿真,而文献[6]和[9]只是对人体特定部位进行了局部的仿真分析。文献[7]则只是完成了具有骨骼层与皮肤层双层结构的人体建模,并实现人体的运动仿真。与文献[8]的仿真结果对比可得,本文实现的虚拟人的仿真更加真实,真实地再现了人体结构,虚拟人动作更加逼真,并且增加了肌肉层面的仿真与分析,运动更加符合人类特性。而且各个关节约束更加合理,动作更加逼真。文献[8]则仅仅是完成了作者的指定动作,不能实现运动捕获数据的驱动,而且动作并不符合牛顿运动定律。由仿真结果可观察到,虚拟标记点与实验数据采集点在空间上的位置基本一致,很好地还原了实验对象的真实运动。各体段约束协调,关节角度合理,未出现失真,整个运动过程真实、自然、逼真,符合人体生理特性及运动规律。
4 小结
本文采用上面提到的人体骨骼和肌肉模型的建模方法以及运动捕获数据的处理方法,实现了基于肌肉的人体运动仿真,同时满足牛顿运动定律且符合人体运动特征。仿真效果真实、自然逼真。实验结果表明,该方法可靠、有效。但是,由于数据的计算量较大,对计算机硬件有较高要求。下一步笔者的工作重点是进一步优化数据处理算法以及对如何将人体模型运用于特定场景下进行各关节和肌肉力的分析展开研究。
[1] 夏时洪,魏毅,王兆其.人体运动仿真综述[J].计算机研究与发展,2010,47(4):1354-1361.
[2] CHADWICK E K, BLANA D, KIRSCH R F. Real-time simulation of three-dimenssional shoulder girdle and arm dynamics[J]. IEEE transactions on biomedical engineering, 2014, 61(7):1947-1956.
[3] AYUSAWA K, IKEGAMI Y, NAKAMURA Y. Simultaneous global inverse kinematics and geometric parameter identification of human skeletal model from motion capture data[J]. Mechanism and machine theory, 2014, 74(4):274-284.
[4] JUNG Y, JUNG M, LEE K, et al. Ground reaction force estimation using an insole-type pressure mat and joint kinematics during walking[J]. Journal of biomechanis, 2014, 47(11):2693-2699.
[5] XU D, ZHANG S G, WEI H X. Virtual musculoskeletal control model with a spindle-like fuzzy algorithm for robotic compliance[J].Applied mathematical modelling, 2015, 39(12):3265-3279.
[6] CROUCH D L, HUANG H. Musculoskeletal model predicts multi-joint wrist and hand movement from limited EMG control signals[C]//Proc. 37th Annual International Conference of the IEEE Engineering in Medicine and Biology Society. Milan:[s.n.],2015:1132-1135.
[7] 戚福州,侯进,黄永坤.一种基于国标人体测量学数据的虚拟人建模方法[J].计算机工程与科学, 2015, 37(4):783-789.
[8] 黄永坤,侯进,戚福州.三维虚拟人皮肤变形与塌陷部位的调整[J].计算机应用与软件,2015,32(9):184-187.
[9] ASSASSI L,THALMANN N M. Biomechanical modeling of the human articulation for osteoarthritis analysis[J]. Computer methodsin biomechanics and biomedical engineering, 2012,28(1): 573-578.
[10] STAVEN D,MOUSTAKAS K. Virtual human behavioural profile extraction using Kinect based motion tracking[C] //International Conference on Cyberworlds. Santander:[s.n.],2014:411-414.
[11] TANG G, WANG C T. A muscle-path-plane method for representing muscle contraction during joint movement[J]. Computer methods in biomechanics and biomedical engineering,2010, 14(1): 59-69.
马文超(1989— ),硕士生,主研虚拟现实;
侯 进(1969— ),副教授,主要研究方向为人机交互、虚拟现实、人工智能和自然语言处理;
曹宁哲(1990— ),硕士生,主研虚拟现实。
责任编辑:闫雯雯
Study of simulations of virtual human movement based on muscle
MA Wenchao,HOU Jin,CAO Ningzhe
(SchoolofInformationScienceandTechnology,SouthwestJiaotongUniversity,Chengdu611756,China)
Aiming at the questions that the current domestic is lacking in the human motion simulations which obey Newton’s laws of motion, a method of simulations of human movement based on muscle is proposed. The method firstly establishes a musculoskeletal model based on anatomy; then, processes the motion capture data to match the musculoskeletal model; next, calculates the kinematic and kinetic parameters by multi-body kinematics and dynamics and applies the mechanical balance of space constraints in order to obtain the effective joint motion constraint mechanism. Experimental results show that the simulation of human motion is real, natural and realistic by using the proposed algorithm, and demonstrates the effectiveness of the algorithm.
muscle; musculoskeletal model; motion capture; multi-body kinematic
马文超,侯进,曹宁哲. 基于肌肉的人体运动仿真研究[J].电视技术,2017,41(2):98-103. MA W C, HOU J, CAO N Z. Study of simulations of virtual human movement based on muscle[J]. Video engineering,2017,41(2):98-103.
TN919.3
A
10.16280/j.videoe.2017.02.020
国家自然科学基金项目(61371165);四川省动漫研究中心2015年度科研项目(DM201504);成都市科技项目(科技惠民技术研发项目)(2015-HM01-00050-SF)
2016-05-24
猜你喜欢
安徽农学通报(2017年1期)2017-02-15 18:28:07
戏剧之家(2017年1期)2017-02-05 13:32:48
中国科技博览(2016年11期)2016-05-06 04:30:49
湖北农业科学(2015年16期)2015-10-28 22:36:11
广西农学报(2015年4期)2015-09-11 21:36:38
河北渔业(2014年10期)2014-10-27 20:54:55
河北渔业(2014年1期)2014-07-08 21:30:29
体育教学(2014年3期)2014-04-09 09:35:32